Safety summary
What was done
As part of the investigation into the mid-air collision involving Piper PA-44-180 Seminole, VH-JQF, and Beech D95A Travel Air, VH-AEM, near Mangalore Airport, Victoria, on 19 February 2020 (AO-2020-012) the ATSB identified concerns around the pilots' ability to visually identify the other aircraft in time to take avoiding action.
In response to this, the ATSB initiated an aircraft performance and cockpit visibility study to determine at what times the aircraft may have been visible to the crew of the opposing aircraft.
This assessment involved the review of available literature covering the see and avoid concept, the techniques used to assess visibility and analysis of the recorded automatic dependent surveillance broadcast (ADS-B) data from each aircraft. Exemplar aircraft were modelled, and this information was used to calculate the positions of aircraft structure relative to the pilots’ eye positions. This, combined with the analysed ADS-B data, was used to perform an assessment of the size and location of the other aircraft in the pilots’ field of view. Following this an assessment of the benefits of ADS-B IN systems for the purposes of enhancing a pilot’s mental model was undertaken. Finally, using this information an animation was developed that represented the flights from the perspective of each of the pilots involved. The animation also includes a cockpit display of traffic information to demonstrate the benefits ADS-B IN information could have provided for the early detection of the conflicting traffic.
What the ATSB found
The study found that the pilots of both aircraft were unlikely to have acquired the other aircraft visually due to meteorological factors, aircraft closing speed and shielding of the opposing aircraft by cockpit structure with 2 of the 4 pilots likely having the opposing aircraft shielded from their view at key moments. The ATSB analysis indicated that even in clear conditions, more favourable to visual acquisition, the closing speed and shielding by the aircraft structure would have limited opportunities to acquire the other aircraft.
Neither accident aircraft was equipped with ADS-B IN systems. The study shows that had the aircraft been equipped with this technology the pilots would have been alerted to the position of the other aircraft much earlier than by visual acquisition. Both a cockpit display of traffic information with an ADS-B traffic alerting system or an electronic conspicuity device connected to an electronic flight bag application could have provided this. While effective radio communication remains the primary means of self-separation in non-controlled airspace, the targeted and accurate information provided by ADS-B IN can provide the pilot significant assistance.
Safety message
To ensure that a pilot’s mental models of conflicting traffic is accurate, they should use all available information, including the rules of the air, radio, air traffic control (ATC) services and visual scanning to locate and separate from other traffic. Where a visual scan is being used, pilots should always remember to move the whole head to avoid approaching traffic being shielded behind structure within their field of view.
The proliferation of relatively low-cost ADS-B IN and ADS-B OUT equipment, whether inbuilt or in conjunction with electronic flight bag applications on personal electronic devices can provide a significant improvement in this capability. With ADS-B IN and ADS-B OUT installed, aircraft can be more certain of the location of traffic, particularly outside ATC radar and ADS-B ground station coverage areas.
Acknowledgements
The ATSB acknowledges the assistance of the United States National Transportation Safety Board Office of Research and Engineering, the RTCA (formerly Radio Technical Commission for Aeronautics), Moorabbin Air Services and Yarra Valley Aviation in the development and preparation of this study.
Introduction
|
This safety study is presented in 4 sections:
This study does not contain findings, however relevant conclusions and supporting information were considered as part of the safety analysis for AO-2020-012 and influenced relevant findings for that investigation. |
Background
On 19 February 2020 Piper PA-44-180 Seminole, VH-JQF (JQF), and Beech D95A Travel Air, VH-AEM (AEM) collided in mid‑air 8 km south of Mangalore Airport, Victoria. At the time of the collision AEM was inbound to Mangalore Airport on an instrument rating training flight, with an instrument rating student and an instructor on board. JQF had recently departed Mangalore Airport for an instrument rating examination flight with a pilot under examination and an examiner on board.
This was the first mid-air collision between 2 civil‑registered aircraft operating under the instrument flight rules (IFR) in Australia. As the collision was outside of controlled airspace, air traffic control (ATC) was required to provide traffic information on other IFR aircraft, but not ensure separation. This meant that the pilots were self-separating using radio communications and, where possible, the ’see and avoid’ principle. A key part of the investigation was to determine the likelihood that the pilots of each aircraft could detect the other in sufficient time to take avoiding action. Multiple papers and studies conducted by agencies and organisations around the world, including the ATSB, have identified significant limitations with the ’see and avoid’ principle.
The ATSB sought to establish what influence the position and performance of the aircraft, the cockpit structure and human performance limitations had on the pilots’ ability to detect traffic. Further, the ATSB sought to determine what effect an automatic dependent surveillance broadcast (ADS-B) IN system would have had on the pilots’ ability to detect traffic as they converged.
In Australia IFR aircraft are required to be equipped with ADS-B OUT, primarily to increase ATC surveillance service coverage. ADS-B OUT data can also be received and processed for traffic information by aircraft fitted with ADS-B IN systems. Neither aircraft involved in this accident were fitted with ADS-B IN equipment.
The ATSB consulted the United States National Transportation Safety Board (NTSB) Office of Research and Engineering following their study of a mid-air collision that occurred near Ketchikan, Alaska. That study included an animation that replicated the flight paths and view from each aircrafts’ cockpit and simulated the aircrafts’ ADS-B IN traffic displays.
That NTSB study was one of many they performed looking at the effects of cockpit visibility and aircraft performance in mid-air collisions. The ATSB sought the guidance of performance specialists at the NTSB as to the process used to carry out their study. Based on that advice the ATSB gathered location, aircraft and performance data from operators, manufacturers, Airservices Australia (Airservices), and the Civil Aviation Safety Authority (CASA), to conduct this study.
Aim
The aircraft performance and cockpit visibility study sought to understand the performance characteristics of AEM and JQF in the lead up to the mid-air collision to produce a virtual recreation of the flights. Human performance and aircraft structural obscuration were then considered to determine the pilots’ ability to detect the other aircraft. The study also considered the role an ADS-B IN system could have played in increasing the opportunity for timely detection of traffic.
Scope
This study was conducted as part of the analysis for investigation AO-2020-012 Mid-air collision involving Piper PA-44-180 Seminole, VH-JQF and Beech D95A Travel Air, VH-AEM, 8 km south of Mangalore Airport, Victoria on 19 February 2020. The flight data used for the study was primarily the raw ADS-B data broadcast from each of the aircraft.
The investigation found that the collision likely occurred in or close to cloud, limiting the ability of the pilots in each aircraft seeing the other aircraft. However, this study also considered the likelihood for visual acquisition had better weather conditions existed.
Methodology
The methodology for this study is based on similar studies performed by the NTSB Office of Research and Engineering. The completion of the study consisted of the following steps:
- A literature review looking at available information related to human visibility and perception characteristics, aircraft tracking and collision avoidance technologies and aircraft specifications.
- Calculation of the aircrafts’ position and performance characteristics using applicable aircraft information and available recorded data, in this case ADS-B data.
- Development of scale 3-dimensional models of the internal and external structures of representative aircraft using laser scanning technologies and determination of the pilot’s approximate eye position within each model.
- Development of 2-dimensional representations of each pilot’s view of the aircraft structure. The relative position of the other aircraft was located on this representation to determine when it would have been shielded from the pilot’s view.
- Based on the literature review and consultation with ATSB human factors specialists, human performance was considered to determine where and when the pilots may have been able to detect the other aircraft.
- Additional technologies were explored to establish what role these could have played in increasing the pilot’s ability to detect the other aircraft prior to the collision.
- Finally, an animation was developed using position and performance data showing the cockpit view for both pilots in each aircraft overlaid with exemplar cockpit traffic displays and alerts (not fitted to the accident aircraft). This was supplemented by recorded air traffic control data.
Notes
- Throughout this report standard aviation units are used unless specifically stated. These units are nautical miles for distance, feet for altitude and knots (nautical miles per hour) for speed.
- All times in this report are referenced to Eastern Daylight‑saving Time (EDT - Universal Co‑ordinated Time (UTC) + 11 hours), which was the accident location time zone.
- This report is intended to support the AO-2020-012 investigation report and should be read in conjunction with, and in the context of, that report. It relies and expands on factual content presented in that report.
- Unless specifically stated otherwise, any reference to the ’investigation report’ should be taken as referring to the ATSB AO-2020-012 investigation report.
Background
Aircraft Information
AEM
As described in the aircraft information section of the investigation report:
The Beech D95A Travel Air is a 4 to 6 seat, low wing, retractable-tricycle-undercarriage aircraft fitted with 2 180 horsepower Textron Lycoming IO-360-B1B reciprocating engines driving constant speed, two-bladed propellers.
AEM [Figure 2] was manufactured in the United States in 1966 with serial number TD 682. It was first registered in Australia in 1967, and prior to the departure from Tyabb, the aircraft had accumulated 7,400.3 hours in service.
The aircraft was certified for IFR and charter operations and was equipped with dual controls for the student and instructor. The aircraft was also equipped with a Garmin GNS530 radio communication and GNSS navigation system, together with a second communication radio. The aircraft was also fitted with a Garmin GTX335 ADS-B OUT transponder. AEM did not have any ADS-B receiving equipment.
To determine where and when JQF would have been in the view of AEM’s pilots, the positions of both aircraft, AEM’s Euler angles [1] (pitch, roll and yaw) and the location of AEM’s cockpit structure, relative to the pilots’ eye positions, were required.
The positions of JQF and AEM were calculated from available ADS-B data (see the section titled Position estimation) and the location of each aircraft’s cockpit structure was developed from laser scans of exemplar aircraft (see the section titled Aircraft modelling). No recorded data was available for the Euler angles of either aircraft. These were calculated from the aircraft’s position and a range of aerodynamic and physical properties of the aircraft (see the section titled Calculation of Euler angles). These properties included aircraft weight, wing area and the lift co-efficient as a function of the angle of attack (lift-curve). Figure 1 shows the 3‑view diagram of the Travel Air from the aircraft’s maintenance manual.
Figure 1: Travel Air 3‑view diagram

Source: Aircraft manufacturer
Figure 2: Travel Air VH-AEM

Source: Aircraft operator, annotated by the ATSB.
Lighting
The initial airworthiness requirements for the Travel Air outlined the type, intensity, colour, and visibility arcs, in both the horizontal and vertical planes, of the various position lights around the aircraft. The ATSB confirmed that the lighting installed on AEM was in accordance with these requirements.
Position lights, also referred to as navigation lights, are primarily designed for identifying location and orientation at night and their usefulness during the day, is relatively low due to their low intensity. Therefore, they were not expected to be operational at the time of the collision.
In addition to position lights AEM was equipped with upper and lower beacons (flashing red lights). These beacons were required by regulation 196 of the Australian Civil Aviation Regulations (CAR) to be used when an aircraft is in flight or operating on the manoeuvring area of an aerodrome at night or in low visibility. However, the performance standards or intensity of this lighting was not defined. As a result, its effectiveness in aiding visual acquisition was not able to be determined.
The aircraft was not fitted with strobe lights. No further information was available as to the lighting that was installed on the aircraft or its intensity at the time of the accident.
Speed slope windscreen
The factory design of the Travel Air included a two-piece windscreen with a defined centre spline separating left and right panels. Since the introduction of the aircraft, the United States Federal Aviation Administration (FAA) has issued multiple supplemental type certificates (STC) relating to the replacement of the windscreen with a single piece, as was standard for later models of this type of aircraft.
Sometime prior to 1976 AEM was modified with an updated single piece ’speed slope’ windscreen. Due to the age of the modification, the actual date that it was carried out and what STC it was carried out under could not be confirmed. This modification made 2 changes that affected the pilot’s visibility. In addition to removing the centre spline of the windscreen it increased the slope of the screen moving its intersection point with the front of the fuselage further forward and increasing the size of the glareshield required to fill the space between the instrument panel and the windscreen.
JQF
As described in the aircraft information section of the investigation report:
The Piper PA-44 Seminole is a four-seat, low-wing, twin-engine light aircraft. It is powered by 2 180 horsepower Textron Lycoming O-360-E1A6D reciprocating piston engines. JQF [Figure 3] was fitted with three-blade, constant speed and full-feathering aluminium propellers.
The Seminole is equipped with hydraulically operated, retractable, tricycle landing gear. JQF was manufactured in the United States in 1979 with serial number 44-7995291. It was first registered in Australia in 1990. The aircraft was owned by the operator. Prior to the accident flight, the aircraft had accumulated a total flight time of 11,190.6 hours.
The aircraft was certified for IFR and charter operations. It was equipped with dual controls for the student and instructor. The aircraft was also equipped with a Garmin GNS430 radio communication and GNSS navigation system and a second communication radio. The aircraft was fitted with an Appaero Stratus Mode-S transponder unit, which had ADS-B OUT transmit capability only.
To determine where and when AEM would have been in the view of JQF’s pilots, the process applied to AEM for calculation of Euler angles and location of the cockpit structure and pilots eye position was also applied to recorded position data for JQF.
Figure 4 shows the 3‑view diagram of the Seminole from the aircraft’s maintenance manual.
Figure 3: Seminole JQF
 Source: Aircraft operator, annotated by the ATSB.
Source: Aircraft operator, annotated by the ATSB.
Lighting
The initial airworthiness requirements for the Piper PA-44-180 defined the requirements and specifications for lighting fitted to the aircraft. The aircraft was certified under Part 23 of the Federal Aviation Regulations in 1978. Under this certification the aircraft was required to be fitted with an anti-collision lighting system if being used for night operations. This system was required in addition to the aircraft’s position lights. Colourisation must be in either aviation red or aviation white and the required intensity is described formulaically depending on flash intensity. Minimum required intensity above or below the vertical plane is stated as 400 candela between 0‑5°, 240 candela between 5‑10°, 80 candela between 10‑20° and 40 candela between 20‑30°.
The ATSB determined that JQF was fitted with wingtip strobes that were integrated with the position lights. As per procedure, navigation lights would not have been switched on during the day. However, the anti-collision lights were switched separately in the cockpit and examination of the wreckage indicated that these lights were likely to have been on at the time of the collision. The wingtip lights (Figure 3) were Whelen A650PGD1 and A650PRD1 with the ‘R’ and ‘G’ indicating the colour of the position light.
In addition to these lights the aircraft was also fitted with a Whelen Prometheus Plus PAR36 landing light (Figure 3) rated for an intensity of 60,000 candela. To avoid this light interfering with the flight crews’ vision it was set back in the front nose cowl of the aircraft. This reduced its ability to be seen at certain angles away from directly in front of the aircraft. The operator reviewed the light determining that the beam extended 20° either side of straight ahead. The light was visible at 40°, but it was difficult to determine if the light was on. Beyond 70° the light was not visible.
Under procedures outlined in the En-Route Supplement Australia (ERSA) for operating in the vicinity of Mangalore Airport, the landing light should have been switched on within 10 NM of the airport or in the training area. Wreckage examination indicated that the landing light was likely on at the time of collision.
Figure 4: PA-44-180 3 view diagram

Source: Aircraft operator
Recorded Data
As part of the investigation the ATSB reviewed ADS-B data, radar data and ATC recordings provided by Airservices. Data was also collected from an electronic flight bag (EFB) application that was in use by the student pilot of AEM. The EFB data did not provide any additional information so was not considered for further analysis in this study. Neither aircraft was equipped with a flight data recorder or a cockpit voice recorder, nor were they required to be, due to their size and type of operation. No data was recoverable from any of the instruments on board either aircraft.
Recorded ADS-B data
The ATSB obtained 2 data sets from Airservices: filtered data (combined ADS-B and radar) and raw ADS-B data. The filtered data is used for ATC display and alerting functionality and is filtered to approximately 5 second intervals.
Raw ADS-B data records every signal received by ground stations from ADS-B equipped aircraft. These transmissions from each aircraft are at approximately 0.5 second intervals but are not uniform to avoid simultaneous transmission with other aircraft and subsequent data loss.
Further discussion of the operation of ADS-B can be found in the ADS-B and Position estimation sections.
Figure 5 shows the comparison between the raw ADS-B data and filtered data. Due to scaling requirements only the last 20 seconds of AEM’s flight path is shown. All data recorded from JQF’s take-off until the collision is shown. For display, data has been converted to rectangular cartesian co-ordinates with the threshold of runway 05 at Mangalore Airport used as the reference point for the data (an explanation of this process can be found in the Position estimation section). For each point of the filtered data the time and the altitude recorded are shown.
The ATSB analysis of the data also calculated the collision altitude. This analysis determined that the aircraft were at approximately 4,125 ft above means sea level at the point of collision (see the section titled Position information for further detail).
It was noted that in the filtered data there were points beyond the end of the raw data and the estimated collision location. This was due to a projection capability within the Airservices system that accounts for short term loss of signal by estimating the position of the aircraft based on previous track and speed information.
Air traffic control recordings
The ATSB obtained and reviewed air traffic control recordings of communications between Melbourne Centre air traffic controllers and aircraft in the area. The Mangalore Airport common traffic advisory frequency (CTAF) was not recorded. Table 1 shows the communications between air traffic control and both AEM and JQF on the Melbourne centre frequency during the flight. Figure 5 shows the location of JQF at the time the departure call to the controller was initiated.
Figure 5: Raw ADS-B and filtered data comparison [2].

Source: ATSB
Table 1: Key traffic information on Melbourne Centre frequency
|
Time start (*indicates approximate time) |
Time end (*indicates approximate time) |
Aircraft | Comment |
| 1111:21 | 1111:32 | JQF | Taxi call |
| 1117:42 | 1117:55 | AEM | Initial contact with controller on entry to airspace. Area QNH provided and advice of no reported IFR traffic. |
| 1119:35 | 1119:54 | AEM | Controller contacted with information about commencing descent from 6,000 ft and establishing a SAR time for airwork in the Mangalore area. Advice of no reported IFR traffic provided by the controller. |
| 1120:07 | 11:20:08 | AEM | Controller called the pilots of AEM to pass traffic. No response received. |
| 1120:15 | 1120:28 | AEM | Controller again called the pilots of AEM. Pilot responded and traffic information about JQF shortly to depart Mangalore was passed and acknowledged. |
| 11:22:19 | 1123:00 | JQF |
Departure report to controller. Information was provided that the aircraft was passing 2,700 ft on climb to 7,000 ft and tracking to LACEY. Controller advised the pilots that AEM was inbound to Mangalore in JQF’s 12 o’clock position, for airwork, passing 5,000 ft on descent to not above 4,000 ft. During this conversation a STCA[3] for proximity between AEM and JQF activated and was acknowledged by the controller. |
| 1123:51 | 1124:09 | STCA for AEM and JQF. Controller zoomed in on screen and acknowledged the STCA at 1124:09. | |
| 1124:20 | Approximate time of collision |
Source: Airservices, annotated by the ATSB
Meteorological Information
The study considered the effect cloud, background luminosity, wind and sun position may have had on the pilots’ ability to detect the approaching aircraft.
Cloud information
The ATSB reviewed both the forecast and actual cloud conditions for Mangalore Airport at the time of the collision. The Mangalore Airport automatic weather service (AWS) recorded 2 layers of cloud, one scattered at approximately 3,500 ft above ground level (AGL) and a second layer, broken at approximately 4,200ft AGL. To verify this information imagery from Bureau of Meteorology (BoM) weather cameras at Kilmore Gap and Wahring Field were reviewed. Further imagery was provided from a Victoria Police Air Wing helicopter taken 1 hour and 16 minutes after the accident. It indicated that the cloud layer was between approximately 4,050 ft and 4,900 ft above mean sea level with some patchy cloud below this. Figure 6 and Figure 7 show the Kilmore Gap and Wahring Field weather cameras. Figure 8 and Figure 9 show the Victoria Police Air Wing images and Figure 10 shows the approximate locations of these photos relative to the estimated collision point.
Figure 6: Weather camera image from Kilmore Gap

Source: BoM
Figure 7: Weather camera at Wahring Field

Source: BoM
Figure 8: View of base of cloud from the Victoria Police Air Wing helicopter taken approximately one hour after the accident (altitude approx. 4,000 ft)

Source: Victoria Police
Figure 9: View of top of cloud from the Victoria Police Air Wing helicopter taken approximately one hour after the accident (altitude approx. 4,900ft)

Source: Victoria Police
Figure 10: Weather imagery locations relative to Mangalore Airport and the collision point

Source: Google Earth, BOM and Victoria Police annotated by the ATSB
Extent of cloud
The BoM also provided the ATSB with satellite imagery showing the extent of cloud at the approximate time of the accident. Figure 11, taken 4 minutes before the collision, shows extensive cloud around Mangalore Airport with more broken areas towards the north and west and increasing cloud to the south and east.
Figure 11: Satellite image showing cloud coverage of central Victoria 11:20 EDT 19/02/2020

Source: BOM annotated by the ATSB
Background luminosity
Background luminosity is the calculation of the effective brightness of the background against which an object is being perceived. During the day, the background luminosity depends on the time of year and atmospheric conditions including cloud. The actual background luminance on the day of the incident was unable to be determined. Table 2 reproduced in Hobbs, 1991 from the Illuminating Engineering Society’s Lighting Handbook provided approximate values for luminance in common conditions. Due to the cloud cover on the day and the time of year, the ATSB used the overcast value of 300 cd/m2 for further assessment.
Table 2: Luminance of common backgrounds

Source: IES Handbook in ATSB – Hobbs 1991
Wind information
Wind plays a key role in the calculation of aircraft performance and Euler angles. Unfortunately, none of the available meteorological or other recorded data captured the wind at altitude at the time of the collision. As a result, the ATSB estimated the wind at altitude using data from the BoM’s grid point wind and temperature forecast (GPWT), issued at 0644 on 19 February 2020 and valid from 1100 that day. The chart indicated that at approximately 5,000 ft the wind was from 200° true and the wind speed was between 30 and 35 kt.
Sun position
Where the sun is visible, or close to the edge of the field of view, the sun’s glare can reduce a pilot’s ability to locate nearby traffic. Due to the sun’s consistent movement across the sky its position relative to a point on the earth’s surface can be calculated with a reasonable degree of accuracy. The ATSB obtained data on the sun’s position relative to the collision position (location and altitude) from the United States National Oceanic and Atmospheric Administration.[4] For the final 270 seconds leading up to the impact, the Azimuth [5] and Elevation [6] angles of the sun relative to the collision point varied from 58.26 to 56.98° and 50.8 to 51.56° respectively.
Human performance information
Object perception
It is not possible to state how large an object needs to be in a person’s field of view before they are able to distinguish it. This is due to a wide variety of factors both internal and external to the viewer and include the background that an object is seen against, where in the field of view it appears, relative motion of the object, vibration and physiological factors such as fatigue, age and hypoxic effects.
Multiple studies and reports give varying values as to what the minimum perceptible size of an object may be. One such example is an NTSB report from a mid-air collision in 1987 (NTSB, 1988), where 12 minutes of arc (0.2°) was suggested. Other examples suggest between 24 - 36 minutes of arc (0.4-0.6°) is more realistic, especially if conditions are sub optimal (Morris, 2005). The 2 main factors that will affect the size of the aircraft in the pilot’s eye are the dimensions of the aircraft and distance from the viewer. Figure 12 shows the change in visual angle and the time to collision at various constant closure speeds for an aircraft with a 40 ft wingspan. [7]
Figure 12: Visual angle and Time to Impact for various closure rates

Source: (Morris, Midair Collisions: Limitiations of the See-and-Avoid Concept in Civil Aviation, 2005)
For perspective, a piece of paper measuring 4 by 20 mm positioned lengthwise subtends an angle of 0.2° horizontally in the field of view when viewed from 5.73 m away.
Physiological blind spot
When considering at what point an object can be perceived, it is also necessary to consider the blind spot associated with the structure of the human eye (where the optic nerve exits the eye). This covers approximately 5° of azimuth and 7.5° of elevation. In most cases this is overcome by binocular vision where each eye can see what is in the blind spot of the other. However, where an object obscures perception from one eye, then in combination with the blindspot of the other eye, can potentially prevent an object being seen entirely. (Hobbs, 2004)
Relative movement
An object will be more easily perceived, regardless of where it is in the field of view, if there is relative movement between the object and viewer. (Hobbs, 2004) This is due to the human brain’s evolutionary adaptation to perceive movement as an indicator of threat. In many cases aircraft on collision courses will not have relative movement and so the eye will take longer to detect the aircraft. The perception and location of relative movement in the field of view is assisted where there is a stationary object, such as a structure, past which the object is moving. In this case the viewer will more easily locate the target if it is moving or transiting past the cockpit structure which will remain constant in the pilot’s field of view. Under ideal conditions where there is a stationary reference point proximal to the target movements of 0.017 - 0.034° of arc per second may be detected. When no such references are available it will require a 10-fold increase in movement for detection. (ATSB, 2002)
Strobe or other aircraft lighting may be used to create apparent movement or a focal point that attracts the viewer to the object.
There have been a range of studies assessing the effectiveness of various lights on people’s ability to see or perceive an object. Where an object is in a known position, a light even of relatively low power can be detected. Where a light is required to attract the attention of a viewer, particularly where it is in that person’s peripheral vision, it is required to be 5-10 times brighter than a light where a person is already alerted to the location and is simply looking for confirmation (Bullough, 2011).
Reaction time
Once an object is perceived by the viewer it takes time for the person to identify it, realise it is a threat, determine the appropriate course of action and implement that course of action. (ATSB, 2002) In the case of aircraft approaching one another, the implementation of that course of action will not only require an input to the controls from the pilot but also a reaction from the aircraft.
Based on a range of research, the FAA published an advisory circular that defined standard reaction time for a pilot from perception to the aircraft reacting. This table showed that from seeing an object to aircraft reaction was 12.5 seconds. Of this the 2 most significant portions are the determination that the other aircraft is on a collision course and determining the appropriate course of action. These 2 elements make up 9 of those 12.5 seconds. Table 3 is taken from the relevant FAA Advisory circular (AC 90-48D CHG 1.
Table 3: Aircraft Identification and Reaction Times Chart

Source: Federal Aviation Administration
Theoretically, this means that, with no alert or guidance, if an object on a collision course is perceived less than 12.5 seconds prior to impact then the impact will occur regardless of a pilot’s attempted evasive actions. The time available for pilots to react can be increased through the introduction of an external or internal stimulus that alerts the pilot to traffic that poses a collision threat, provides an estimate of the location or if the aircraft is on a collision course a manoeuvring recommendation to resolve the conflict (a ’resolution advisory’).
Avoidance alerting
Mental model
A pilot’s mental model of the airspace around them is a key tool in good airmanship and conflict avoidance, regardless of the type of airspace operated in. The model requires an understanding of:
- the rules and regulations governing the airspace
- what traffic is in the airspace
- what traffic is relevant
- how relevant traffic is moving
- the intentions of the traffic’s pilot
- traffic’s performance.
This is then compared to the pilot’s intentions and the characteristics of their aircraft to determine the likelihood of conflict with the traffic.
A pilot’s mental model is affected by a range external and internal inputs. Internally pilots rely on:
- experience
- understanding of the airspace system
- understanding of their aircraft and its performance
- instrumentation
- on-board systems such as ADS-B or a Traffic Collision Avoidance System (TCAS)
- their view of the surrounding airspace.
Externally, the model is supplemented by radio communications, whether from ATC or directly or indirectly by other pilots on relevant frequencies and data relating to weather or procedural information that may be available digitally through a range of electronic devices. Increased accuracy and frequency of information available to a pilot can increase the accuracy of their mental model, and therefore reduce the risk of conflict with other traffic.
Alerting
As discussed above, for a pilot to detect a threat and effectively manoeuvre to avoid a collision the aircraft must be large enough for the pilot to detect it by eye and then react with sufficient time to manoeuvre and avoid the conflict. With an effective mental model based on radio or other detection technologies pilots can be aware of aircraft and conflict potential well beyond the limits of the human eye and at distances that allow ample time to arrange separation.
The alerts that assist in the development of the mental model can be either internal or external. External alerts could be direct communications or area broadcasts from either ATC or other aircraft. These alerts do not necessarily apply directly to the pilot and will often not require any action. They assist the pilot’s mental model development and conflict avoidance in 3 ways:
| 1. | Identify areas or aircraft that may require additional attention, either immediately or later. | |
| 2. | They can provide information as to the likely tracking of another aircraft assisting the pilot to determine if or when it is likely to become a threat. For example, a pilot that reports on a common traffic advisory frequency (CTAF) that they have just landed and taxied clear of the runway is unlikely to be a threat to an overflying aircraft. | |
| 3. | They can identify and locate targets beyond visual range and assist in visual acquisition at the edge of the visual range through directing the scan to a particular point of focus. As discussed in the Object perception section visual target identification is more likely to be effective if the viewer is aware of a target’s presence. This also assists in focusing the pilot’s view or scanning in a part of the airspace where a threat is likely to emerge, reducing the risk of empty field myopia or becoming caught in a focal trap. |
Internal traffic alerts are provided by aircraft systems. These alerts have a range of advantages over externally provided alerts, including:
| 1. | All information that they provide is relative to the pilot and their aircraft. This requires less information for the development of an accurate mental model. In many cases this information is presented on a display providing a visual representation of traffic to assist or verify the pilot’s mental model. | |
| 2. | Internal alerting systems do not rely on radio communications from external parties. This is particularly important in non-controlled and remote airspace where radio calls may not be required. | |
| 3. | They can provide information about a target aircraft, such as type, speed, and activity (climbing, descending or level), well beyond the range of the human eye, allowing pilots to arrange self-separation earlier. | |
| 4. | Internal alerting systems can, in some cases, provide pilots with additional information such as guidance about recommended avoiding action if separation is compromised. | |
| 5. | They can provide a more frequent refresh rate for the data allowing for more accurate and near‑continuous information to be available to the pilot. |
In discussing the relative effectiveness of internal and external alerting, Hobbs (1991) made the following statement.
Traffic alerts [presumably those provided by an aircraft collision avoidance system (ACAS)] were found to increase search effectiveness by a factor of eight. A traffic alert from ATS or from a radio listening watch is likely to be similarly effective
This paper was written prior to the introduction of the ADS-B system and the development of ADS‑B IN based traffic alerting systems. The similarities between the types of alerts that older ACAS and ADS-B IN systems can provide to the pilot would suggest that a similar increase in detection potential would be possible.
Not only do these alerts make it more likely that a threat aircraft will be detected or detected earlier, they also reduce the time required to take avoiding action. In the Reaction time section above, the time required from detection to implementation of avoiding action is cited as 12.5 seconds. Of this, 7.3 seconds is required for the pilot to detect the conflicting aircraft and recognise it as a threat. An internal alert can provide the pilot with the position and threat status of an aircraft limiting the delay from location and threat determination. Consequently, with ACAS, including ADS-B IN it is less likely that aircraft will converge without pilots realising and taking action to ensure separation.
Finally, it is important to note that outside of controlled airspace aircraft may not be required to have ADS-B or TCAS functionality and may not carry a radio or make broadcasts. Therefore, an effective lookout that covers as much of the sky as possible remains a critical component of conflict avoidance.
|
Case Study: Collision on runway between Extra EA-300 aeroplane, VH-EXR and Guimbal Cabri G2 helicopter, VH-LTO, Caloundra Airport, Queensland, on 18 September 2020 ATSB Investigation: AO-2020-051 On 18 September 2020, a high-performance single engine aeroplane VH-EXR (EXR), collided on the runway with a training helicopter VH-LTO (LTO) at Caloundra Airport, Queensland. EXR was conducting check circuits while LTO was conducting a stop and go landing during a navigation exercise. As part of the investigation, the ATSB identified that several radio transmissions from 3 different aircraft (including the accident aircraft) were either misheard, not heard or misinterpreted. The pilots of EXR did not hear or accurately assimilate the radio calls from LTO. The inaccurate assimilation was based on their understanding of the aircraft type and the operational requirements/ procedures at Caloundra. The student pilot of LTO made 6 broadcasts on their approach to, and within, the circuit area. They identified EXR and believed it had identified them due to a radio transmission indicating that EXR was landing ’number 2’, However, a third aircraft had just conducted a touch and go and this was likely the aircraft that the pilot’s in EXR believed they were following, not LTO. Of the 2 pilots in EXR, the rear seat pilot recalled hearing a transmission from the helicopter but they understood that the aircraft would be on a 500 ft circuit approaching the helipad and not in the same circuit as the aircraft and so did not warrant their attention. The front seat pilot of the aeroplane, who was the pilot in command and pilot flying at the time of the incident did not recall hearing any calls from the helicopter and further commented that while helicopters used the airport regularly, they were not usually in the circuit. Consequently, the pilot of LTO believed that the occupants of EXR were aware of their presence, while neither pilot of EXR expected the helicopter to be on the runway. With visibility restricted by the aircraft’s structure, flight profile and the near‑stationary helicopter, no pilot was able to detect the other aircraft until they collided. Both aircraft sustained substantial damage but there were no injuries.
Propeller strike mark and skid damage to VH-LTO Source: Aeropower, annotated by the ATSB In this accident, both the limitations of visual acquisition and a limited or incorrect mental model of the surrounding traffic were present. While the pilots were providing the relevant communications for alerting, as they were not being correctly received or interpreted, they were unable to enhance the visual acquisition opportunity. While internal alerting functionality was not available in this case, it would have provided all 3 pilots with a better understanding of the location of the other aircraft, their movements and assisted them in visual acquisition and collision avoidance. |

Pilot eye position
Each pilot’s eye position relative to the aircraft structure is the combination of several factors. The study considered the pilot’s height, seat position, and head movement. The pilots’ heights were obtained from their CASA medical records. The ATSB utilised a human analogue during this study to replicate the seated heights of the pilot’s in the opposing seat and the shielding from their head and torso.
The seat position for each pilot prior to the impact were not able to be determined from the wreckage examination. When ATSB investigators attended exemplar aircraft to gather data in support of this study, persons of the same approximate height as the pilots sat in the control seats and positioned the seats to an appropriate and comfortable position for operating the aircraft. These seat positions were recorded along with the scan data for further analysis.
In some cases, aircraft are developed with a ’design eye position’ the location from which operators are intended to view the cockpit. Neither of the manufacturers of the accident aircraft were able to locate or provide the ATSB a design eye position for their aircraft.
Movement of the pilot’s head, both translational and rotational, creates variability in both the eye position and field of view. The study considered a range of position and rotation of the eyes. Two matrices were developed simulating eye translation and rotation and the view of the cockpit and location of the target aircraft from these positions was determined. Further description of this process, and results, can be found in the Sensitivity analysis and Field of view sensitivity sections.
Workload
The human brain has limited processing capacity. When multiple sources of information need to be perceived and processed at the same time this can limit the ability of the pilot to attend to each of them effectively. For pilots, tasks including operating or listening to the radio, talking or conducting mental calculations can reduce a pilot’s eye movement, and effective field of view. (Hobbs, 2004)
Research has shown that stimuli, particularly those in the peripheral vision are more difficult to detect when attention is focused on a priority task. Data from NASA indicated that undertaking concurrent tasks while performing a visual scan can reduce pilot eye movement by up to 60%. (Hobbs, 2004)
Onboard AEM both pilots would be expected to have a slightly elevated workload as, in addition to regular flying duties, the instructional flight included the first VOR approach in this aircraft for the student. In JQF, not only was the flight an examination, meaning that both the examiner and the candidate would likely have been experiencing a higher workload, but they were also in the take‑off and climb phases of flight which also have relatively higher workload requirement.
Field of view
A pilot’s field of view or visual field, measured in azimuth and elevation angles from the eye, determines how far from the centre point an object can be effectively located. This field will vary from person to person and can change based on a range of factors including age, and existing visual conditions/diseases. A binocular field of view typically traverses through 190° of azimuth and 135° of elevation with a slight bias towards downwards perception (+60° elevation, -75° elevation). (Gibb, Gray, & Scharff, 2010) Within this are multiple layers of vision covering the rest of the visual field with decreasing acuity as they move further away from the centre.
For simplicity in this study the visual field has been broken into 3 areas
| 1. | The foveal region covering approximately the central 10° (both azimuth and elevation) of the visual field. Within this area is the sharpest daylight vision and the highest acuity. | |
| 2. | The central visual field, defined as 60° of azimuth and 60° of elevation split evenly above and below the centre of the field of view. Within this area objects can be located simply by their presence and do not need to specifically attract the viewers’ attention. | |
| 3. | The full visual field is the remaining area that a person can see. In this area objects can appear but will only be specifically focussed on or perceived if they attract the viewers’ attention through contrast, or movement including the use of lights. |
Figure 13 shows an exemplar silhouette of an equirectangular [8] 360° view of a Vans RV-8 aircraft cockpit showing the 3 visual areas field of views.
Throughout this report these coordinates will be used to describe the pilot’s visual field. It is worth noting that while all objects in the field of view might be visible to the pilot it is unlikely that all objects, particularly ones on the extremities or in areas where there is a large amount of visual clutter or activity will be detected (Gibb, Gray, & Scharff, 2010).
Figure 13: Fields of view example

Source: ATSB
Empty field myopia
When there is nothing in the field of view that the viewer is specifically focussed on the eye returns to a ’default’ position and focusses on a point 0.5‑1 m in front of it. This can lead to a viewer being unaware of potential threats proximal to them. This is referred to as empty field myopia. (Hobbs, 2004)
Pilot scanning
To improve the effectiveness of ’see and avoid’ and to overcome issues with ’empty field myopia’ and the ’blind spot’ pilots are trained to visually scan the airspace around them for potential threats. This is usually combined with an internal scan of the aircraft’s instruments.
General guidance is to ensure that the entire visual field is scanned by moving and rotating the head to reveal objects otherwise lost behind aircraft structure or in visual traps. [9] The FAA recommends a series of regularly spaced eye movements that cover approximately 10° of the visual field and where that area is focused on for one second to allow the eye to adjust and focus in this area to enable detection.
It is further recommended that external viewing occupies 66‑75% of the scan time, with the remainder spent scanning instruments and looking inside the aircraft. (FAA, 2017) Research indicates that the recommended amount is reversed with instrument rated pilots spending up to 66% of their time looking in the cockpit. When they were aware of the presence of traffic this decreased to 49%. This research also indicated that pilots are likely to scan the centre of windscreen thoroughly but neglect scanning of the edges of a windscreen. (Colvin, Dodhia, & Dismukes, 2005)
IFR pilots are taught to focus more of their scanning inside the aircraft and less externally. This is due to an increased focus on instruments in this type of flight and a heavier reliance on procedural separation techniques.
Glasses
The use of glasses can affect multiple characteristics around a person’s vision. Usually this will improve perception of objects allowing the viewer to perceive objects more clearly at certain ranges and in certain parts of the visual field. However, they add another layer of material through which a person can look and create distortion. They also add further areas of shielding where frames intersect with the wearers sight lines.
Lighting
The ability of a person to perceive an object depends on the contrast ratio between the background and the object itself. This ratio can be increased using anti-collision lighting which will not only provide additional contrast against the background but in the case of strobe or rotating beacons provide movement that can attract the viewers’ attention alerting them to the presence of a threat.
Regulatory background
Regulation 196 of the Civil Aviation Regulations (CARs) require that aircraft conducting IFR operations in Australia be fitted with green, red and white navigation lights dependent on position on the aircraft. In addition, they must be fitted with at least one red anti-collision beacon or aviation white strobe lighting. The operational requirements for these lights are defined within the Civil Aviation Orders.
These documents specify operational requirements and so do not specify the technical requirements for either of these types of lights. The type and performance specifications for lights are defined within the airworthiness and certifications standards for the aircraft. The requirements and fitted lighting for both AEM and JQF are outlined in the Aircraft lighting sub-sections within each Aircraft information section.
Visibility
There has been a wide body of research into the effectiveness of aircraft lighting in improving visual detection of aircraft. A range of agencies around the world have encouraged aircraft owners and operators to fit anti-collision lights. The luminance of traditional aircraft lights meant the presence of these lights was of minimal advantage particularly in bright background lighting conditions such as those experienced in daylight (Hobbs, 2004).
Much of the available research into the effectiveness of aircraft lighting was carried out prior to the introduction of light emitting diode (LED) lighting when standard lighting intensities were in the order of a maximum of 300‑400 candela. As Figure 14, reproduced in (Hobbs, 2004), shows that for these lights to be effective at 3 nautical miles, background luminance cannot be more than approximately 30 candela (equivalent to a very dark day). On a full sunlit or even an overcast day lights of this power this would not be sufficient for an operator to see let alone draw attention.
Figure 14: Required effective intensity of lights

Source: Harris 1987 in ATSB – Hobbs 1991
Currently available lighting
Over the past 15‑20 years LED technology has become more commonly used in almost all lighting applications including aviation lighting systems. Due to lower power consumption, higher brightness and longer lifetimes, LEDs provide a significant advantage over the traditional incandescent or halogen bulbs (US DOE, 2022).
The provision of these improvements has led the FAA to encourage the use of landing lights when an aircraft is operating within 10 NM of an airfield or below 10,000 ft (FAA, 2020). The low power consumption and increased brightness of modern LED landing lights provide for visibility at significant distances even in bright daylight. For example, the sunspot series of LED landing lights produced by AeroLEDs in the United States have candela ratings between 150,000 and 420,000 (AeroLEDS, 2021) which is more than sufficient for a light to be seen at distances of 3 NM even outside of the foveal region of highest visual acuity (Figure 14). It is important to note that many landing lights do not have strobe functionality and so must use brightness and contrast alone to attract the viewers’ attention to the target.
A recommendation to use the taxi and landing light within 10 nautical miles, including within the circuit area, was also part of the standard flight procedures for Mangalore Airport as outlined in the ERSA and made up part of the standard operating procedures for JQF.
Aircraft modelling
Discounting meteorological and human performance factors, which are considered separately, this study assumed that the aircraft would be visible from one another unless an opaque part of the aircraft’s structure was directly in line between, or shielding, the pilot’s eye position from the ’target’ aircraft.
To accurately determine the location of the aircraft’s structure from both pilots’ eye positions the ATSB modelled exemplar aircraft of those involved in the accident. Two full scale digital models were developed representing the aircrafts’ external and internal structures.
Point clouds were developed from data gathered using a FARO Focus series laser scanner. Each point is representative of the position of the material that reflects a laser beam put out by the scanner. As the scanner sweeps through 360° of azimuth and 150° of elevation it creates points representing the three-dimensional location of the aircraft’s structure. Noting that the laser will only capture data when a reflection is received, transparent objects such as windows may not be identified or identified accurately. However, their position can be deduced from the surrounding structure.
As the scanner can only ’see’ in a direct line of sight, a single scan cannot capture the whole aircraft as some areas will be in the scanner or aircraft’s shadow. To overcome this, a series of known points or ’targets’ are set up around the aircraft and then the scanner placed in multiple locations where both the aircraft’s surfaces and the targets can be seen. The ATSB utilised 2 different types of targets - spheres and checkerboards placed throughout the space at locations likely to be overlapped by multiple scans.
The utilisation of spheres provided a target that maintains its shape when viewed from any angle so can be referenced in any scan where it is visible. Checkerboards are used as they are easy to transport and position in larger numbers, however flat surfaces mean that they are only usable when the scanner can capture the whole checkerboard. The patterns created by the targets allows multiple scans to be combined or ’merged’ by the scanner software. [10] The number of targets and their distribution simplifies the processing as it creates more identifiable patterns in the targets that the software can identify.
Once merged the scans generate a point cloud and are processed into a triangulated mesh. Both the cloud and the mesh are dimensionally accurate representations of the whole aircraft.
For this study, the scans were performed at multiple locations around each aircraft, and inside the aircraft. This resulted in 4 models being produced for each aircraft:
| 1. | Exterior model of the aircraft with internal scans not included. | |
| 2. | Exterior and interior model of the aircraft with both pilots’ seats unoccupied. | |
| 3. | Exterior and interior model of the aircraft with human analogue in the left pilot seat. | |
| 4. | Exterior and interior model of the aircraft with human analogue in the right pilot seat. |
The point cloud that was generated by the scanner contained all the points that the scanner had been able to see. This included not only the aircraft but the surrounding environment. Additionally, depending on the nature and material that that the laser was reflecting off there was some ’noise’ or unwanted points in the scan. To overcome this the scan data was automatically and then manually cleansed and these points were removed from the point cloud.
Both aircraft were modelled with propellor blades in a single static location. The wreckage analysis (see investigation report) determined that the engines and propellors of both aircraft were operational up to the collision. While the propellors are a solid structure, the speed with which they would have been rotating meant that the pilot’s visibility through the propeller disc would not have been significantly impeded by them. The propellor blades were removed during the modelling stage.
Aircraft were modelled on the ground with the landing gear extended. Due to the position of the landing gear, it is not visible to the pilot during flight and therefore does not impede detection of a target aircraft. As such, the gear was retained within the models of both aircraft. The attitude of the aircraft when sitting on the landing gear is different to that while in flight. This was accounted for by levelling the aircraft model when converting each aircraft from the scanner axis system to the body axis system, see point cloud conversion section for further details.
AEM
For the study, AEM was substituted with VH-IJM (IJM) a Beechcraft E95. While AEM was a D95A, the fitment of the ’Speed Slope’ windscreen modification (see the section titled Aircraft information) meant that it was more accurately represented for structural purposes by the E95. While scanning IJM, ATSB personnel also viewed VH-FLM, a D95A that had retained the original windscreen layout, and took photographs for comparison with both AEM and IJM.
The model developed of IJM comprised 22 external scans and 9 internal scans taken over the course of a day while the aircraft was hangered. At the time of scanning IJM was not fitted with dual cockpit controls as AEM was at the time of the accident. The ATSB reviewed photos of AEM configured with dual controls and determined that the control yoke for the right seat pilot would not have affected the pilot’s visibility and so it was not considered as necessary for accurate model development.
Figure 15 shows IJM during preparation for scanning, surrounding it are a range of targets, both checkerboards and spheres. Figure 16 shows a panoramic image taken by the laser scanner when situated over the right pilot’s seat. Panoramic images like this were taken at each scanner head location and are used by the scanner software to ’colourise’ the point cloud. Figure 17 shows the 3-dimensional point cloud model of IJM.
Figure 15: IJM prepared for scanning.

Source: ATSB
Figure 16: Panoramic image taken by laser scanner when scanning from right pilot’s seat

Source: ATSB
Figure 17: 3-dimensional point cloud model of IJM

Source: ATSB
JQF
For the study, JQF was substituted with VH-NLO (NLO) a PA-44-180 Seminole manufactured approximately a year prior to JQF. NLO was scanned by ATSB personnel over the course of 2 days while hangered. When scanned, NLO was equipped with 2 bladed propellors compared to JQF’s 3 bladed propellors. However as discussed previously, due to their limited impact on visibility, the propellor blades were removed from the models. The ATSB reviewed imagery of NLO and JQF with 2 and 3 bladed propellors, it was determined that, while not dimensionally identical, the spinner domes from the 2 and 3 bladed propellors were similar enough to not require further assessment or modification of the aircraft model.
The model of NLO consisted of 23 external scans and 8 internal scans. To facilitate scanner positioning within the aircraft, seats were removed prior to interior scanning and were replaced as necessary for locating a human analogue to replicate the second pilot’s eye positioning. Figure 18 shows NLO in the hangar at Mangalore Airport during preparation for scanning with checkerboard and spherical targets visible. Figure 19 is a panoramic image taken by the laser scanner when positioned approximately at the left pilot’s eye position. Figure 20 shows the 3-dimensional point cloud model of NLO.
Figure 18: NLO prepared for scanning

Source: ATSB
Figure 19: Interior panoramic view of NLO from left seat pilot’s position – note sun visors in the lowered position

Source: ATSB
Figure 20: 3-dimensional point cloud model of NLO

Source: ATSB
Point cloud conversion
All points in the 3-dimensional models were recorded relative to an origin point, in the case of the aircraft scans, this was relative to the location of the scanner head when the first scan was taken. These co-ordinates are referred to as being in the Scanner Axis System. To accurately calculate the position of the target aircraft relative to the viewer aircraft the target’s position must be expressed relative to the viewer aircraft and in its co-ordinate system, this system is referred to as the viewer aircraft’s Body Axis System. To convert from the Scanner Axis System to the Body Axis System each point must be translated and rotated using a series of matrix transformations. [11]
Calculating the rotation and translation matrices relied on the identification of a series of 3‑dimensional points in the Scanner Axis System with known co-ordinates in the Body Axis System. For this study the ATSB used the left and right wing tips, the nose and rear of the aircraft and the highest point on the tail as identified on the aircraft 3 view diagrams (Figure 1 and Figure 4). These points were identified in both the Scanner Axis System and in the aircraft’s Body Axis System. From this the ATSB calculated the transformation matrices and applied the rotation and translation to the point clouds for each model.
Pilot eye positions were defined in the Scanner Axis System and the same transformations were applied to compute their coordinates in the aircraft’s Body Axis System.
With the aircraft fuselage and pilot’s eye position in the aircraft’s Body Axis System the azimuth and elevation angles of the aircraft structure relating to the pilots’ eyes were calculated. These positions were then represented on a 2D plot with the target aircraft locations to establish the windows where the target aircraft (see the section titled Locating the target aircraft) was shielded from view.
Refining the pilots’ eye positions
The location of the pilots’ eyes was based on the locations of the eyes of the human analogue used in the study. Due to potential differences between the position of the human analogue’s eyes and the pilots’ eyes a matrix of possible eye positions (see the section titled Sensitivity analysis) was developed and the pilot’s view of the cockpit structure from each position in the matrix was examined. Using pilot and aircraft characteristics and images of both the accident and exemplar aircraft cockpits, investigators selected optimised eye positions within the matrix of eye positions. Throughout the remainder of this study these optimised eye positions were used as the primary eye positions for assessment and calculations. The original position taken from the human analogues were used in the sensitivity analysis section to identify the difference that small movements of the eye position could make to visibility and referred to as the ’displaced eye position’.
Locating the target aircraft
The location of the target aircraft in the field of view of the pilot of the viewer aircraft can be defined in terms of the azimuth and elevation angles from the viewer to the target, as depicted in Figure 21. To compute these angles, the target aircraft’s coordinates are first transformed from an Earth-based coordinate system into the viewer aircraft’s body-axis coordinate system.
The area of the pilot’s field of view taken up by the viewer aircraft’s structure can similarly be expressed in terms of the azimuth and elevation angles (from the pilot’s optimised eye position) defining the boundaries of the structure. At points where the azimuth and elevation coordinates of the target aircraft overlap those of the viewer aircraft’s structure, the target can be considered to be ’shielded’ from the pilot of the viewer aircraft. Similar considerations can be used to determine the location and shielding of the sun in a pilot’s field of view.
Figure 21: Azimuth and elevation angles from viewer aircraft to target aircraft

Source: NTSB
Automatic Dependent Surveillance – Broadcast
ADS‑B OUT
ADS-B collates and transmits a range of gathered and calculated aircraft parameters based on Global Navigation Satellite System [12] (GNSS) data. Parameters include:
- aircraft position - latitude, longitude and geometric altitude
- position accuracy
- time the position was recorded
- unique aircraft identifier [13]
- flight id (in this case the aircraft registration mark)
- performance information including
- ground speed,
- track angle and
- rate of climb or descent.
In addition, ADS-B can be connected to other aircraft systems to provide more accurate display data including heading, barometric altitude and vertical rate.
ADS-B transponders can also transmit emergency indicators using dedicated transmission settings. The system is defined as automatic as it does not require an external interrogation before transmitting its data and dependent as it relies on a GNSS source for position information.
Data is transmitted line of sight on an open 1090 MHz frequency and can be collected by a range of receivers. In Australia, Airservices operates and maintains the ADS-B network for air traffic control. There are multiple other networks and individual receivers that provide a range of coverage patterns within Australia and globally. Individuals may even build their own receivers to obtain traffic information about aircraft operating nearby.
Additionally, recent improvements in technology have allowed for ADS-B receivers to be fitted to satellites which can provide significantly greater coverage than ground‑based receiving stations. Further details relating to reception networks for ADS-B data can be found in the Receiver network coverage section below.
Except for certain exempted aircraft, as of 2 February 2017 under Civil Aviation Orders 20.18, it is required that all aircraft operating IFR be ADS-B OUT equipped. These exemptions expired for Australian aircraft on 1 January 2020. This requirement assists ATC in locating IFR aircraft and providing separation inside controlled airspace, and a traffic information service in non-controlled airspace, where ADS-B coverage is available.
ADS-B vs Mode C and Mode S transponders
Traditionally aircraft identification has relied on interrogation of a Mode C or Mode S transponder fitted to the aircraft. These 2 systems provide a series of aircraft parameters, 3 for mode C and 7 for standard mode S which are then supplemented by data from secondary surveillance radar (SSR) information. This allows ATC to establish course, speed, climb or descent, the aircraft’s position and other performance parameters for ATC traffic management purposes. The data provided by a Mode C or Mode S transponder when interrogated, is referred to as a ’squawk’. (Device Technologies Inc., 2019)
Conversely, ADS-B transmissions do not require interrogation. The ADS-B system automatically transmits relevant data at an average rate of 2 per second, this is referred to as a ’squit’.
ADS-B transmissions contain up to 49 parameters referred to as ’extended squitter’. This volume of data gives it a significant advantage over the older mode S and mode C transponders. (Garmin Aviation, 2021) The additional benefit is that any appropriate receiver can accept the signal and can unpack it for relevant information about an aircraft without the need for interrogation.
Receiver network coverage
Airservices Australia
Airservices maintains a network of 50 ADS-B receivers based around mainland Australia, supported by 7 wide area multilateral receivers based in Tasmania (TASWAM) which provides both radar and ADS-B coverage. (CASA, 2019) The coverage provided by each of these stations depends on the surrounding terrain and consequent shielding of signals. (Airservices Australia, 2020) Figure 22, Figure 23 and Figure 24 show the network coverage, as of May 2020, at altitudes of 5,000, 10,000 and 20,000 ft respectively. Mangalore Airport is within the Airservices ADS-B networks coverage area with coverage down to ground level.
In Class G airspace [14], outside of these coverage areas and without ADS-B IN technology, pilots of aircraft not fitted with Traffic Collision Avoidance Systems (TCAS), whether flying under IFR or visual flight rules (VFR) must rely on procedural separation and accurate radio communications for their mental model of the airspace and traffic around them.
Figure 22: Airservices ADS-B receiver coverage 5,000 ft [15]

Source: Airservices Australia
Figure 23: Airservices ADS-B receiver coverage 10,000 ft

Source: Airservices Australia
Figure 24: Airservices ADS-B receiver coverage 20,000 ft

Source: Airservices Australia
Third party networks
Other third-party organisations or individuals may use a separate network of receivers with differing coverage patterns to that provided by Airservices. This can provide better coverage in certain areas where these organisations may have a specific focus. One such example of this is the utilisation of third-party receivers by the AvPlan EFB to supply its subscribers with ADS-B data.
This application was available on an iPad device carried by the student pilot of AEM, but it was not able to be determined whether a traffic information display was selected at the time of the collision. Furthermore, investigation by the ATSB determined that prior to or at the collision altitude, this network would not have located JQF and so would not have provided traffic information prior to the collision.
Satellite ADS-B reception
Mounting ADS-B receivers to a satellite network provides continuous global coverage of ADS-B equipped aircraft. This information can then be provided to relevant air navigation service provider (ANSP) or third-party subscribers improving coverage at low altitudes and away from airports and population centres (Aerion, 2021). Satellite coverage does not guarantee reception as it depends on the signal strength of an aircraft’s transmitter, requiring a minimum of a 125 watt transmitter if only fitted with a top mount ADS-B antenna (Aerion, 2021).
In Australia it is a requirement for aircraft manufactured on or after 9 February 2012, with a maximum take-off weight of more than 5,700 kg or a max cruising speed of greater than 250 kt, to be fitted with ’diverse’ antennas (meaning top and bottom mounted) (CASA, 2020). Diverse antennas provide the best coverage for both ground based and satellite ADS-B receivers. In most cases, larger aircraft are fitted with this antenna layout even if older than the requirement as it forms a part of the TCAS system. Diverse antennas are particularly important when the aircraft structure may shield an antenna. (Aerion, 2021) This is most common when the aircraft are on or close to the ground, or when manoeuvring in flight.
Supplementary technologies
Some EFB applications allow users to share device GNSS data to provide traffic information to other subscribers using a data connection. While this does provide an improvement to the situational awareness there are 3 primary drawbacks:
- The display of data can lag significantly due to the transmission time required between devices via a data connection.
- A data connection is required to be able to transmit or receive the information for display. It is important to note that the lack of an internet connection will not impact the ability for a device to receive a GNSS signal and so the viewing device’s position will still be able to be displayed but not traffic.
- Position information is only available for other users of that specific application who have the traffic transmission functionality operational. This may give the pilot a false sense of the traffic picture around them. [16]
ADS-B IN
ADS-B IN refers to an aircraft that is equipped with a device that can receive other aircrafts’ transmitted ADS-B information. ADS-B IN data can provide location and proximity information on local traffic shown on a cockpit display or personal electronic devices with appropriate software.
In Australia, the fitment of ADS-B IN provides improved awareness of all IFR traffic and ADS-B OUT equipped VFR traffic. This can assist pilots in locating aircraft when traffic information is provided by ATC. It can also provide pilots outside of ATC coverage with accurate information of proximal traffic at ranges far greater than that detectable by the human eye.
Due to the signal characteristics and technology that is in use, ADS-B receivers are small and lightweight. This enables them to be fitted into aircraft avionics packages or attached, either wired or wirelessly to personal electronic devices in the cockpit. Installing these receivers improves significantly on data from EFB applications as it displays all nearby ADS-B equipped traffic in near real time.
Cockpit display of traffic information
Cockpit display of traffic information (CDTI) is a system used to display ADS-B IN information to the pilot to enhance spatial and situational awareness and assist in visual acquisition of traffic. The CDTI screen shows in a planar or overhead view the location of proximal traffic to the aircraft, over either a moving map or against a plain background with range rings depicting distances from the aircraft. These systems have a range of settings that can be adjusted to display or remove certain aircraft or distractions as per flight crew requirements.
ADS-B traffic alerting system
ATAS is an add on to ADS-B IN functionality that can provide alerts about the location, speed and direction of proximal traffic to a pilot with the aim of reducing the risk of mid-air collision. When aircraft are projected to breach certain defined proximity thresholds the ATAS system audibly alerts the pilot to the intrusion with a standard phraseology that states ’Traffic, direction [by clock co-ordinate], [17] altitude [high, same level, low], distance, current activity [ascending, level, descending]’.
Unlike most other ADS-B IN functionality, the ATAS system has an audible only implementation that can provide an alert to the pilot. However, in many cases it is combined with display functionality on the CDTI screen whereby the traffic triggering the alert is highlighted on the screen.
An example of a CDTI screen with integrated ATAS is shown in the Cockpit display of traffic information study section of the safety analysis.
Traffic Collision Avoidance System
Traffic collision avoidance system (TCAS) is a separate traffic avoidance system that utilises transponder interrogation of mode C and mode S units. The system interrogates the other aircraft’s transponder and calculates the relative position of other aircraft. It then, analyses the track of the host aircraft and approaching aircraft to determine if there is a collision risk. The system provides 3 levels of alerting for nearby traffic that is within a defined area around the host aircraft: (FAA, 2011)
| 1. | Proximal traffic, uses the same definition as ATAS (6 NM lateral and 1,200ft vertical separation) and a similar change in target aircraft symbol on the display, from unfilled to filled character (white diamond). | |
| 2. | Traffic alert, is similar to the ATAS aural alert whereby if traffic breaches a certain threshold the crew will receive an audible ’traffic, traffic’ callout and a change in target aircraft symbology to a higher contrast colour and separate shape (yellow circle). | |
| 3. | The third alert that the TCAS system provides is different to that off the ATAS system in that, having detected a collision risk, it also provides an avoidance manoeuvre recommendation based on the tracking of the host and target aircraft. |
If fitted to both aircraft the TCAS systems will work together providing opposing resolution advisories that reduce the risk of collision. With the development of ADS-B technologies and more accurate aircraft positioning using GNSS data, TCAS systems have been able to be augmented with ADS-B and ATAS functionality.
The FAA provides guidance in Advisory Circular (AC) 20-172B as to how the systems can be integrated effectively so that duplicated alerts are not received based on the ADS‑B and radar returns. In addition to the increased accuracy of ADS-B data, another advantage is that it provides information on more distant targets.
Complementary technologies
In the United States ADS-B IN is supported by 2 other technologies to improve a pilot’s situational awareness of traffic proximal to them - Automatic Dependent Surveillance – Rebroadcast (ADS‑R) and Traffic Information Service – Broadcast (TIS-B). These systems are an advancement on ADS-B and radar technology and combine ADS-B information, gathered via an onboard ADS-B IN system with traffic information from ATC to provide pilots of ADS-B IN equipped aircraft with a better picture of the traffic around them.
The ADS-B network in the United States differs from that in Australia in that it uses a second ADS-B frequency. This reduces congestion and provides infrastructure for additional ADS‑B functions such as graphical weather information. The second frequency, 978 MHz Universal Access Transceiver (UAT) is used primarily by general aviation aircraft, operating at lower levels (below 18,000 ft).
While many ADS-B IN devices support both reception and display of both frequencies, some ADS‑B devices cannot. In these cases, the ADS-R network provides a rebroadcast of the alternate frequency to those aircraft that require it. Within the contents of the extended squitter parameters is an indicator of whether an aircraft is dual frequency enabled and, if not, what frequency it is broadcasting on. This allows the ADS-R network to rebroadcast relevant transmissions on the relevant frequencies without causing duplicate or over transmissions.
Due to the additional delay required for the ground stations to receive, decode and retransmit the data, there is an increased lag in reception and analysis of ADS-R data. Additionally, ADS-R systems will only work in areas where the aircraft is in range of a relevant ADS-B ground station. (FAA, 2017)
TIS-B provides ADS-B IN equipped aircraft with approximate location and speed of aircraft detected by ATC primary and secondary surveillance radar, which is then transmitted to aircraft on the relevant ADS-B frequencies for display and utilisation in traffic alerting. This means that aircraft equipped with only a mode C or mode S transponder can be more easily located by ADS‑B IN equipped aircraft, enhancing the opportunity for visual acquisition by aircraft crew.
The system also uses position and altitude information to filter the volume of traffic data broadcast to an ADS-B IN client aircraft. TIS-B will only transmit data associated with transponder-only (non‑ADS-B OUT) aircraft detected within 15 NM horizontally and +/- 1,750 ft vertically of the ADS-B IN client aircraft. (FAA, 2017).
The implementation of these technologies, ADS-R and TIS-B, carries with them a significant expense and at this stage they have not been introduced in Australia. As more aircraft, particularly in general aviation, become ADS-B equipped and depending on the technologies and frequencies used there may be an increased appetite to introduce these systems. (Airservices Australia, 2016)
Regulator guidance
In support of the mandating of ADS-B OUT for IFR aircraft in Australia, both CASA and Airservices have produced a range of guidance material to assist pilot’s in the implementation and operation of ADS-B. Specifically, in July 2020 CASA released an advisory circular (AC 91-23 v1.0) titled ADS-B for enhancing situational awareness. The documentation covers the requirements and benefits of ADS-B OUT. However, pilots do not have real time access to ADS-B data without a device that can receive and process this data (ADS-B IN.)
Section 9.1.1 of the AC states:
Being able to receive ADS-B transmissions from other aircraft and to display that information to the pilot is an essential component of ADS-B technology to enhance a pilot's situational awareness. The capability to receive ADS-B transmissions is generally referred to as 'ADS-B IN'.
This is followed by a statement in section 9.2.1 of the AC that ADS-B IN technology is not required in any Australian aircraft.
Without the accompanying ADS-B IN functionality, ADS-B OUT only provides increased situational awareness to ATC.
Electronic conspicuity devices
Electronic Conspicuity (EC) devices are designed to assist in the identification of aircraft operating under the VFR and are not required to meet the same ADS-B OUT standards as equipment fitted to aircraft operating under the IFR. In September 2020, CASA approved these relatively cheap portable devices so aircraft could be more easily identified by both ATC and aircraft fitted with ADS-B IN systems.
The most recent iteration of these devices includes ADS-B IN functionality allowing them to display ADS-B OUT equipped traffic on a moving map relative to the receiving aircraft through portable electronic devices. The GNSS receivers that these devices use do not necessarily meet an aviation technical standard. Subsequently while Airservices can receive the transmissions and information from these devices the information is not currently displayed to ATC for airspace management and separation.
EC devices have significantly lower transmit power than full IFR ADS-B installations. This means that the distance the signal can travel and still be received and decoded is lower. This does not affect the ability for traffic to be detected by other aircraft in the area at ranges significantly greater than visual acquisition. However, it would limit their ability to be detected by satellite or ground based ADS-B receivers. This could hamper, search and rescue operations or accident investigations.
For example, the Sky Echo 2 produced by uAvionics and an approved EC device by CASA has a nominal transmit power of 20 watts (uAvionics, 2022) allowing it to be detected at ranges of up to 40 NM (OzRunways, 2022). As discussed in the satellite ADS-B reception section a minimum transmit power of 125 watts is required for satellite reception.
While not specifically designed for fitment to IFR aircraft, the use of these devices with ADS-B IN functionality connected to an EFB application can provide a cost-effective alternative to fitment of a certified ADS-B IN system. Additionally, their portability allows for a single unit to be used across multiple aircraft that already have ADS-B OUT provided the unit’s ADS-B OUT functionality is disabled. This ensures that duplicate traffic information is not transmitted.
The SkyEcho 2, can be connected to the AvPlan or OzRunways EFBs. This device can be used for ADS-B IN and OUT or it has ability for the transmit function to be disabled and only used as an ADS-B IN device. Where ADS-B OUT functionality is not required, such as in an IFR aircraft with certified ADS-B OUT, the uAvionix ’Ping’ provides an ADS-B IN functionality at a lower price point without a transmit capability.
ADS-B fitment
Currently it is a requirement for aircraft operating under the IFR to be ADS-B OUT equipped. To better understand the current environment relating to ADS-B fitment in those aircraft operating under the VFR, CASA conducted a voluntary survey of VFR pilots and aircraft related to equipment including ADS-B that was currently carried on the aircraft. The survey, conducted between March and May 2021, received unique applicable responses from 1,936 pilots relating to the 2,245 aircraft, which was deemed by CASA to be broadly representative of the VFR community in Australia. For the purposes of the survey, CASA further broke down the VFR group into general and sport aviation. General aviation is VH-registered aircraft, except gliders, paragliders, gyroplanes, and Sport aviation aircraft are those registered with sports and recreational organisations. (Civil Aviation Safety Authority, 2021)
The survey found that approximately 40% of general aviation aircraft are fitted with some form of ADS-B OUT, with 15‑18% also fitted with some ADS-B IN capability. For sport aviation aircraft this is considerably lower with less than 20% of aircraft fitted with some form of ADS-B and approximately 6‑8% fitted with or using an ADS-B IN device.
Of those general aviation aircraft that were equipped with ADS-B about 47‑50% indicated that they also had diverse antennas (top and bottom mounted). For sport aviation aircraft this was only about 14‑21% indicating that they had diverse antennas. As discussed in the Receiver network coverage section, diverse antennas provide an increased likelihood of detection by reducing shielding due to aircraft structure.
As part of the survey, CASA also looked at where these aircraft are typically operated. They found that up to 38% of General aviation aircraft and 11% of Sport aviation aircraft with ADS-B are operating in an area without ATC coverage. In these areas, the fitment of both ADS-B OUT and ADS-B IN devices is more important as there is no third-party alerting capability, such as ATC, to provide traffic information.
CASA also asked pilots about their use of EFB applications, with approximately 80% of VFR pilots utilising an EFB application, including almost 90% of general aviation pilots. Of the responses received 70% reported using either AvPlan or OzRunways as their EFB application of choice, both of which have the capability to be linked with an ADS-B device.
However, only 15‑20% of pilots reported that they had linked the EFB application with an available ADS-B device. The survey results stated:
Interestingly, pilots of general aviation aircraft have a higher level of EFB use, but a higher proportion of sports aviation pilots have their EFB linked to ADS-B. Examining aircraft that have some form of ADS-B shows that for pilots who fly general aviation aircraft, only between 28.5% and 36.0% link ADS-B to their EFB. Whereas for pilots who fly sports aviation aircraft equipped with ADS-B, between 64.1% and 80.4% link ADS-B to their EFB. (Civil Aviation Safety Authority, 2021)
Finally, the survey asked about awareness and intentions around low cost ADS-B units (EC devices). Up to 70% of VFR pilots were aware of the availability of these devices and of those, up to 50% indicated their interest in purchasing a unit. However, 37% of the survey’s respondents indicated that it would be at least 6 and more likely 12 months before they would purchase an ADS-B device.
Limitations of ADS-B IN systems
ADS-B IN systems have a significant number of advantages for pilots flying under either VFR or IFR. However, it is important to also note the limitations of the system and remind pilots that these systems are designed to assist them in their responsibilities to maintain an effective lookout for traffic and communicate in the event of a potential conflict.
ADS-B IN systems can only detect ADS-B OUT equipped traffic that is within the line of sight of the aircraft. This means IFR aircraft and ADS-B equipped VFR aircraft (including those equipped with EC devices) can be detected. Additionally, as ADS-B OUT is not mandated for all aircraft, there will remain traffic that cannot be detected and pilots must maintain a lookout and listening watch on the relevant radio frequency to ensure they are aware of all traffic in the area.
Finally, ADS-B IN functionality and traffic information should not be used to second guess or override an ATC instruction in controlled airspace.
Methodology and results
Introduction
This section outlines how human factors, aircraft performance, aircraft structure and technological considerations either affected, or could have affected, this accident. It also details the processes that the ATSB used to calculate aircraft position and performance characteristics from ADS-B data.
The factors affecting the views from each pilot’s seat and where the opposing or target aircraft would have appeared in the visual field and how reaction time, visual field and perception size affected the ability to detect the aircraft are also analysed. Finally, it illustrates how available technology could have provided additional alerting capabilities for the pilots, improving their mental model, and increasing their ability to detect and avoid the other aircraft.
Aircraft performance study
Position estimation
As discussed in the Recorded Data section, the ATSB received all available raw ADS-B data from the Airservices receiver network for both aircraft. To be able to effectively use this data for both position estimation, calculation of Euler angles and further analysis of visibility, it needed to be processed. Specifically, position data for the 2 aircraft was interpolated to common sampling points in a common co-ordinate system and smoothed to eliminate unrealistic jumps that could introduce spurious noise in parameters calculated from the data.
The following sections outline this process and how it was undertaken.
Filtering and refinement of raw ADS-B data
For AEM the raw ADS-B data set contained 6,565 points covering 24 minutes from 10:59:59 till 11:24:20. For JQF the data set contained 539 data points covering approximately 4.5 minutes from 11:19:55 to 11:24:20. On review, it was determined that both data sets contained a volume of data that would need to be filtered out before further analysis could be completed. This primarily focused on the removal of repeated data points or data points that had the same position for 2 different times.
Figure 25 and Figure 26 show the difference in time recorded between data receptions for the 2 aircraft. The maximum time between received data points for AEM data was 6.5 seconds and for JQF it was 2.4 seconds. As noted in the Recorded data section, to avoid over transmission and data loss, ADS-B transmissions are not at constant time intervals. Variation is semi-random between 0.4 and 0.6 seconds (Francis, et al., 2011). The reception of signals depends not only on the transmission but also on any shielding, from either terrain or aircraft structure, between the transmitter and receiver.
The ATSB’s review of the data identified 3,788 points in the AEM data set that were reporting the same position as another point in the data set. Of these 2,059 were identified as repeat data points (reporting same time and position) with the remaining 1,729 within one second of one of the adjacent points. For JQF the ATSB review identified 117 points that were reporting the same position, of these 49 were identified as repeat points and the remaining 68 were within one second of an adjacent point. A filter was applied to the data to remove repeated points. Where multiple points of the same position were identified, the first data point was retained.
After the repeated points were removed, variation between data points for JQF was between 0.390 and 2.406 seconds, with an average interval of 0.628 seconds. For AEM the variation was from 0.258 – 6.508 seconds with an average interval of 0.526 seconds.
Figure 25: JQF time between signal receptions

Source: ATSB
Figure 26: AEM time between signal receptions

* Note: Maximum recorded separation between signal receptions was 6.5 seconds, due to the scaling of the graph this has been truncated to 3 seconds. All calculations and data analysis used 6.5 seconds’ difference for the relevant data point.
Source: ATSB
Conversion to rectangular cartesian co-ordinates
ADS-B data contains aircraft latitude and longitude position in decimal degrees to 9 decimal places. The data was simplified by converting from latitude and longitude to rectangular cartesian co-ordinates. In this case, eastings and northings in meters relative to a reference point within a certain area on the earth’s surface. While not as accurate globally as latitude and longitude, these cartesian co-ordinates allow for simpler calculations of relative positions and proximities when locations are nearby. For this study the ATSB utilised a batch processing application of Geoscience Australia’s Geodetic Calculator [18] to convert the data from latitude and longitude to eastings and northings.
To simplify the data processing, the co-ordinates were identified relative to a reference point within the global co-ordinate system. In this case, while JQF departed runway 23 the threshold of runway 05 at Mangalore Airport was utilised, as the aircraft passed over this point while airborne. [19] Figure 27 and Figure 28 show JQF and AEM’s flight paths in cartesian co-ordinates in meters relative to this reference point. Although altitude was recorded in feet, no conversion of the data was required at this stage.
Data smoothing
While GPS data is highly sampled and relatively accurate, positional and altitude discrepancies do occur, which can cause jumps or steps in the data. Additionally, ADS-B altitude is recorded in 25 ft steps. Further calculations, particularly calculation of the Euler angles, using raw data would lead to unrealistic variation in multiple parameters. This, in turn, would affect the positioning of the aircraft and structure in later visibility calculations. To account for this, the ATSB smoothed both position and altitude data using a series of methods including integrations and running averages. The result of this smoothing was best fit lines through the data points that more accurately represented the flight profiles than the raw data set.
The following figures show the smoothed tracks for both position and altitude compared to the data recorded in the raw ADS-B Data. Figure 29, 30 and 32 show the location and altitude of AEM in comparison to the smoothed data. Figure 31 and Figure 33 show the same information for JQF. The figures show that the smoothed data accurately represented the position for both aircraft, and it removes the ’stepped’ nature of the altitude.
Resample data
To simplify the calculations and enable the aircraft positions over time to be compared, the position of each aircraft needed to be known at a constant time interval with a common time base. As the time intervals between raw ADS-B data points is not constant the data needed to be resampled to a constant time interval. The smoothed data developed through the process described above can be represented as a curve of the aircraft position through time. The position of each aircraft along these curves at a constant time interval, in this case 0.5 seconds, from a defined base point were obtained. The time 11:20:00 was selected as the base point for the analysis as it was close to the take-off time of JQF and simplified calculations being on a 10-minute divisor.
Figure 27: JQF flight track in relative cartesian co-ordinates

Source: ATSB
Figure 28: AEM flight track in relative cartesian co-ordinates

Source: ATSB
Figure 29: AEM calculated position vs ADS-B position

Source: ATSB
Note: Due to scaling constraints and resolution of the image the line representing the AEM calculated positions is not visible beneath the AEM ADS-B location data. To confirm the correspondence the ADS-B data was removed from this graph and a check carried out. To overcome scaling constraints the final 30 seconds of AEM’s data was reproduced in Figure 30 and shows the similarity between the ADS-B and calculated positions.
Figure 30: AEM calculated position vs ADS-B position (last 30 seconds)

Source: ATSB
Figure 31: JQF calculated position vs ADS-B position

Source: ATSB
Figure 32: AEM calculated altitude vs ADS-B altitude over time

Source: ATSB
Figure 33: JQF calculated altitude vs ADS-B altitude over time

Source: ATSB
Calculation of Euler angles
If the position of an aircraft as a function of time is known, then it is possible to estimate the Euler angles provided the following are known (O’Callaghan, 2020):
1. The motion and density of the air mass relative to the earth (wind)
2. The lift co-efficient as a function of the angle of attack
3. The gross weight of the aeroplane
4. The sideslip and lateral acceleration of the aircraft are negligible (aircraft is in co-ordinated flight).
Where actual values were available or could be calculated from known information for these parameters, they were used. Where values were not available, they were estimated based on known parameters about the aircraft, conditions and the type of operation.
In their aircraft performance and cockpit visibility study, the NTSB described how the Euler angles could be calculated (O’Callaghan, 2020):
The position of an airplane as a function of time defines its velocity and acceleration vectors. In coordinated flight [assumed], these vectors lie almost entirely in the plane defined by the airplane’s longitudinal and vertical axes. Furthermore, any change in the direction of the velocity vector is produced by a change in the lift vector, either by increasing the magnitude of the lift (as in a pull-up), or by changing the direction of the lift (as in a banked turn). The lift vector also acts entirely in the aircraft’s longitudinal-vertical plane, and is a function of the angle between the aircraft longitudinal axis and the velocity vector (the angle of attack, 𝛼). These facts allow the equations of motion to be simplified to the point that a solution for the airplane orientation can be found given the additional information about wind and the airplane lift curve (i.e., 𝐶𝐿 vs. 𝛼).
Euler angles, based on the ATSB’s smoothed position data, are shown below. Figure 34 - 36 show the pitch, roll (bank angle), heading (magnetic and true) of both AEM and JQF as a function of time leading up to the collision. Figure 37 shows the computed air and ground speeds of both aircraft.
The data showed that AEM had some minor deviations in pitch, less than 5°, throughout the final 260 seconds of the flight. Over the last 80 seconds of the flight the aircraft’s pitch trended downwards until the final 10 seconds when it trended up by approximately 2°. Variation in roll was minimal, apart from several spikes in the bank angle, none more than 5°. Heading and track angle remained near constant throughout final 260 seconds with the aircraft travelling north.
Data for JQF showed it making turns as per the flight path with changes in roll and heading corresponding to these manoeuvres. Throughout the flight, pitch remained in an upward trajectory with some reduction in areas where the aircraft levelled or decreased its rate of climb. Figure 38 shows the rate of climb in feet per minute based on the smoothed altitudes.
Figure 34: Aircraft pitch angles over time

Source: ATSB
Figure 35: Aircraft roll (bank angle) over time

Source: ATSB
Figure 36: Aircraft heading and track angles

Source: ATSB
Figure 37: Aircraft speeds over time

Source: ATSB
Figure 38: Aircraft rate of climb

Source: ATSB
Collision geometry
Based on the estimated positions and calculated performance characteristics, the ATSB sought to estimate the collision geometry between the 2 aircraft. The aim of this was to determine whether the collision geometry based on the performance analysis agreed, within limitations of the data, with that determined using the on-site wreckage assessment. This provided a cross check to both the performance analysis and the on-site wreckage assessment.
Aircraft proximity
The ATSB first analysed the position data, within the resampled smoothed data set, over time looking at the distances and altitudes between the 2 aircraft. This established the collision location, geometry and aircraft closure rate (see the section titled Aircraft closure rate).
The following parameters were calculated for this assessment, aircraft metres east and north of the Mangalore Airport runway 05 threshold over time and lateral, vertical and total proximity over time. To calculate the total proximity over time, altitudes were converted to meters. Figure 39 to Figure 43 show the results for each of these parameters.
Figure 39: Aircraft metres east of runway 05 threshold

Source: ATSB
Figure 40: Aircraft meters north of runway 05 threshold

Source: ATSB
Figure 41: Lateral proximity

Source: ATSB
Figure 42: Vertical proximity

Source: ATSB
Figure 43: Total proximity

Source: ATSB
Geometry projection and estimation
The ATSB extrapolated 3 additional data points beyond the end of the previously assessed data set. Based on previous analysis, it was understood that this would take the aircraft through and beyond the estimated point of collision. These calculations resulted in Figure 44 with the projected position of the aircraft at 11:24:20.05. This was calculated to be the first time that either aircraft would have passed through the centreline of the other and represented the time of the collision. The linear representations of the aircraft accurately depict scale but does not accurately depict the structure’s shape.
The data showed a similar collision geometry to that estimated from the wreckage examination (Figure 45 and Figure 46). The ATSB estimated and plotted the difference. It was determined that there was approximately a 5-10 metre difference between the projected and estimated collision geometries. Based on the resolution of the data available, and the range of inherent errors both in the positions and the assumptions that had to be made to complete the analysis, it was concluded that the 2 data sources supported one another. It was further noted that, due to disturbance of both aircraft wreckages, the collision geometry calculated based on the wreckage examination also relied on a level of estimation of the aircraft position and orientation.
The ATSB’s analysis indicated that approximately 0.55 seconds before the collision AEM was on a true heading of 352° and JQF on a true heading of 132°, giving a relative angle of 140°. At this time JQF and AEM were estimated to be at approximately the same level (JQF 4,124 ft and AEM 4,127 ft) with JQF maintaining its altitude and AEM descending towards Mangalore Airport at a reducing rate. Based on this the estimated collision altitude was 4,125 ft. The ground speeds of the aircraft were 92 kt and 192 kt, for JQF and AEM respectively and the closing speed was approximately 244 kt (see the section titled Aircraft closure rate for further detail).
Figure 44: ATSB aircraft ADS-B position projection

Source: ATSB
Figure 45: ATSB collision geometry estimation

Source: ATSB
Figure 46: Estimated collision geometry from wreckage analysis – investigation report.

Source: ATSB
Aircraft closure rate
Based on the position assessment, the closure rate between the 2 aircraft was calculated. For the final 260 seconds prior to impact, the rate varied between 197‑271 kt, with an average closure rate of 244 kt. Figure 47 shows the change in closure rate in the period leading up to the impact, with the rate increasing to just above the average in the final moments before the collision.
Figure 47: Aircraft closure rate (kt)

Source: ATSB
Research presented in the Object perception section and shown in Figure 12, indicated that for these aircraft with a closure speed of 245 kt, it would be expected that the angular size of the target aircraft would have been approximately 0.4-0.5° about 10-12 seconds before the collision.
Cockpit visibility study
As detailed previously, at the time of the collision one or both aircraft were likely in or had just emerged from cloud. Additionally, research presented in the Reaction time section indicated that at least 12.5 seconds is required for aircraft pilots to effectively see and avoid a converging aircraft.
The cockpit visibility assessment will consider the likelihood that the pilots could have detected each other within this timeframe, even if the environmental conditions had been more conducive to visual acquisition. It will consider a scenario where a cloud layer was present, but at a higher altitude, resulting in greater visibility while having little impact on the presence of the sun, the background luminance or contrast values for the aircraft.
Aircraft observed size
Based on the positional and performance analysis outlined in the previous section, the ATSB determined the approximate angular size of the target aircraft in the eyes of the pilots of the viewer aircraft. For this assessment, the azimuth and elevation angles to the following 5 different points on the aircraft were considered:
- intersection point of wings and centreline of the fuselage
- nose
- tail
- forward tips of both wings.
The difference between the maximum and minimum azimuth angles represents the maximum angular size of the aircraft in the pilot’s eye. As Figure 48 - Figure 51 show there was little change in the aircrafts’ relative size until the last 10-12 seconds before the collision.
AEM
In the case of AEM, the target aircraft’s angular size (if visible and without obstruction) would have been approximately 0.39° 12.5 seconds prior to the collision. This increased to 1°approximately 5 seconds before the collision and 7.5° in the last second before impact. Based on the research presented earlier, it is highly unlikely, even with clear conditions that the target aircraft would have been a perceptible size to the pilots of AEM 12.5 seconds before the impact, limiting opportunities for avoiding action.
JQF
In the case of JQF, the target aircraft’s angular size would have been (if visible and without obstruction) approximately 0.43° from either pilot’s field of view 12.5 seconds prior to the collision. This increased to 1° approximately 6 seconds before the collision and 8.6° in the last second before the collision. As above, it is highly unlikely that AEM would have been a perceptible size to the pilots of JQF 12.5 seconds before the impact to have permitted avoiding action.
Figure 48: Angular size of JQF from AEM for the last 260 seconds.

Source: ATSB
Figure 49: Angular size of JQF from AEM for the last 15 seconds

Source: ATSB
Figure 50: Angular size of AEM from JQF for the last 260 seconds.

Source: ATSB
Figure 51: Angular size of AEM from JQF for the last 15 seconds

Source: ATSB
Sun consideration
Sun location
With the azimuth and elevation from a particular location known, it is possible to calculate the azimuth and elevation angles from the aircraft to sun as both the aircraft and the sun move over time. As discussed in the Meteorological Information section, the ATSB obtained the sun azimuth and elevation relative to the collision point for the 270 seconds leading up to the accident. These values were obtained at 30 second increments and a linear interpolation was used to calculate positions at half second intervals equivalent to the resampled position data. From this the azimuth and elevation from each aircraft to the sun were calculated.
Figure 52 and Figure 53 show the azimuth and elevation angles from AEM and JQF to the sun over time. Figure 54 and Figure 55 show the location of the sun in relation to the cockpit structure from the position of both left and right seat pilot’s for AEM. Figure 56 and Figure 57 show azimuth and elevation for JQF.
Sun visors
Both AEM and JQF were fitted with visors to limit sun glare. Due to the disruption of the wreckage on both accident sites it was not possible to determine if the visors were being used at the time of the collision.
AEM’s flight path altitudes indicated that it was above the cloud during its flight and so the sun visors may have been utilised during some portions for the flight. However, the presence of cloud at and above the approximate collision altitude and the ATSB analysis of the aircraft trajectories and sun positions indicated that the sun was in such a position that the visors are unlikely to have been necessary. Consequently, they were considered to have been in the stowed position.
The location and flight path of JQF was entirely beneath the could layer at approximately 4,200 ft and within its estimated extents. The ATSB analysis of the aircraft trajectory and sun position also indicated that the sun was in a position whereby the visors would not have been necessary and have subsequently been considered in the stowed position.
Differently to AEM, the visors of JQF were see through (see Figure 19). Instead of a solid barrier they had a tinted piece of Perspex that could be brought down into the pilot’s field of view to limit sun glare. While this does not have as significant an impact on visibility as the solid visor, the tinting of the Perspex can disguise objects in the visual field or make them harder to see by either changing the contrast between the object and the background or dimming lights intended to indicate position.
Sunglasses
Sunglasses worn by pilots can have a similar effect, particularly those with polarised lenses. However as discussed in the above paragraphs, the lighting conditions and sun positions would tend to indicate that it is unlikely that glasses were being worn in the lead-up to the collision.
One of the 4 pilots involved in the accident required vision correction for exercising the privileges of their license, while this does not preclude the use of standard sunglasses in conjunction with contact lenses there are also several other options available for glare reduction. These include over-glasses, prescription sunglasses the use of transitions lenses, which adjust filtering based on brightness. Given the conditions it is unlikely that these options were in use at the time or that transitions would have provided significant filtering given the background luminance of an overcast day.
Figure 52: Azimuth and elevation angles from AEM to sun

Source: ATSB
Figure 53: Azimuth and elevation angles from JQF to sun

Source: ATSB
Figure 54: AEM left seat pilot azimuth and elevation angles to sun

Source: ATSB
Figure 55: AEM right seat pilot - azimuth and elevation angles to sun

Source: ATSB
Figure 56: JQF left seat pilot - azimuth and elevation angles to sun

Source: ATSB
Figure 57: JQF right seat pilot - azimuth and elevation angles to sun

Source: ATSB
Aircraft contrast
Calculation of visual contrast for the target aircraft depends on the luminance of the aircraft and the luminance of the background that it is seen against. The ratio of these 2 factors give the aircraft’s contrast. The higher the contrast, the easier it is for an object to be detected against its background.
Background luminosity
The background luminosity depends on the:
- light source
- background that the aircraft is seen against.
The light source in this case was the sun diffused through a layer of cloud. However, the background was subject to change from the perspective of each viewer aircraft depending on whether the target aircraft was above or below the horizon line.
The background depends on both the flight path profile and the topography. To simplify the process of determining the background characteristics, the ATSB utilised the animation produced for the investigation (see the section titled Animation development). The simulation software used to produce this animation contains a reasonable approximation of the area’s topography allowing determination of whether the aircraft could be seen against the sky or the topography.
This review indicated that of the last 260 seconds of the flight, if meteorological conditions allowed, the pilots of AEM, would not have seen JQF against the background of the sky until the last 5 seconds where it would have transitioned over the horizon line. For the pilots of JQF, AEM, if visible through cloud, would have been silhouetted against the sky until the last second where it would have been crossing the horizon line.
While the difference between the sky and topography has an impact on the contrast, it was not possible to quantify due to the presence of the cloud reducing the difference between the background luminance levels of the sky and the topography. Due to this, and as discussed in the Background luminosity section, the ATSB was not able to determine a reliable value for the background luminosity on the day of the incident.
Aircraft luminosity
Calculation of the luminance value for an aircraft depends on the.
- location and brightness of the light source that is illuminating the target aircraft
- surface area of the target aircraft that is visible to the viewer
- reflectance value of the target aircraft
- proximity of the target aircraft and the viewer aircraft.
Light source
As detailed above. the source of illumination for the aircraft was the sun. However, due to the presence of the cloud the aircraft would have been viewed under diffuse light through the cloud. Estimations for luminance values from the sun on overcast days vary depending on the source of the data. Due to the amount of cloud and the time of year and day it was estimated that the light intensity from the sun through cloud would sit at the upper end of these values, being approximately 3000 lux.
Surface area
Surface area of the target aircraft that is visible at any time is a function of the aircraft’s relative heading. pitch and bank angles. Visible surface area varies from its minimum when the target aircraft is level on a reciprocal track to its maximum when it is banked on a near‑perpendicular track. Additionally, on a reciprocal track, the greater the pitch angle, whether positive or negative, the more of the surface area will be visible.
Reflectance value
Reflectance value is a measure of how much light a surface will reflect and how much it will absorb. The reflectance values for AEM and JQF were estimated based on the aircraft layouts and colour schemes at the time of the accident. The predominantly white paint schemes at the time of the incident would have likely increased their reflectance value.
Unlike AEM, JQF had a 2-tone paint scheme with the lower half of the aircraft fuselage and the outer portions of the wings painted a darker blue. This paint scheme, with this colour choice, meant a reduction in the aircraft’s overall reflectance value when compared to AEM.
Aircraft proximity
As detailed previously (Figure 43), the distance between the 2 aircraft was calculated.
Evaluation
The ATSB reviewed all the information available for calculating the contrast for the 2 aircraft. While it was determined that such a calculation could be made, the uncertainty resulting from limited information available for estimation of background luminosity, light source, and the reflectance values rendered any calculation of contrast values unusable. Further review undertaken in the Aircraft observed size, Closure rate, Target shielding sections and development as part of the Animation development section indicated that there were a range of other parameters that were likely to have had as great, if not greater, impact on the aircraft’s visibility from one another.
Aircraft lighting
As discussed in the Lighting section of Human performance information, aircraft lighting assists a pilot in locating a target aircraft that may be beyond their visual range. The ATSB reviewed the available information about the lighting that was fitted to both aircraft to look at whether it could have improved the opportunity for detection.
AEM
The review of information about AEM was not able to locate specific information about the lighting that was fitted to the aircraft. It was assumed that the aircraft was fitted with a lighting package that complied with the requirements of its certification and the relevant civil aviation regulations as discussed in the Aircraft information section. Due to the availability of newer more powerful lighting packages, this was considered a worst-case scenario.
For this review, position lights were considered at 40 candela maximum for the wingtips and 20 candela for the rear. Reviewing this information against the chart presented in Figure 14, these lights, if they had been switched on, would have provided little opportunity for detection at a distance that was useful for collision avoidance. No further information was available as to the presence or power of other lighting such as landing or taxi lights.
JQF
For JQF, the addition of strobe lights would have provided additional contrast if they had been activated. However, the best opportunity for attracting the attention of AEM’s pilots was likely to have been the aircraft’s landing light, which had a luminosity of 60,000 candela. Based on information from the operator, the procedures outlined in ERSA and the wreckage examination, it is highly likely that the light was on in the lead up to the collision. Reviewing against Figure 14, at 3 nautical miles and against the background luminance of 300 cd/m2, a light with this intensity would have been visible in both the foveal and out to almost all the inner visual field. The aircraft were approximately 3 NM apart at 11:23:35, 45 seconds prior to the estimated collision time. At this time the target aircraft’s angular size would have been only 0.062° of the pilots’ view, meaning that on size alone it was unlikely to be detected.
These calculations assume an unobstructed line of sight between the viewer and the light. In the case of JQF’s landing light there were 2 additional considerations: the positioning of the light and the environmental conditions.
The landing light was located on the nose of the aircraft, set back into the nose cowl by approximately 30 mm to avoid direct line of sight to the pilots. This meant that the arc through which it was visible in front of the aircraft was reduced. The operator reviewed the lights fitted to a similar aircraft and determined that the beam arc was 20° either side of straight ahead the aircraft and 4° above to 8° below the horizontal axis. The full light was visible to 40° either side of straight ahead, however it had a significantly reduced luminance to the point where it was not possible to determine if it was switched on. Part of the light was visible to approximately 70° either side of straight ahead. The most powerful illumination and the best chance of visual acquisition was within the central beam. Therefore, only the central beam and its visibility were considered for further study.
The assessment of visibility of the light was based on the azimuth and elevation angles from JQF to AEM. Azimuth angles between -20 and 20° and elevation angles between -8 and 4° from JQF were the time that the light would have been directed at the target aircraft (AEM). The azimuth and elevation angles from AEM to JQF’s nose, calculated in the Aircraft observed size section, were then used to determine where JQF’s landing light would have appeared to the pilots of AEM when directed at AEM, and what areas of the pilot’s visual field the light would have appeared in.
The analysis identified 4 windows of time where AEM would have been within the arc of JQF’s landing light. These totalled 74 seconds and varied in length from 5.5 seconds to 50 seconds and when the aircraft were separated by distances of between 12.5 and 1.7 NM. Of these 74 seconds, for the first 32.5 of them JQF’s nose would have been within the foveal region of AEM’s pilots. Assuming the pilots continued looking straight ahead, the aircraft remained within 3° of left side of the pilot’s foveal region for the remaining 41.5 seconds.
The 2 best opportunities for visual acquisition of the light were 10 seconds between 11:23:04 and 11:23:14, between 76 and 66 seconds before the collision and 5.5 seconds between 11:23:47.5 and 11:23:52.5 between 32 and 27 seconds before the collision. During the first opportunity aircraft proximity was between 5.01 and 4.37 NM, when the aircrafts angular size was between 0.069‑0.076° in the pilot’s field of view. The second opportunity the proximity was between 2.09 and 1.75 NM, when the aircraft’s angular size was between 0.160‑0.188° (Figure 58). These results were also compared against the cockpit structure of AEM (see the section titled Target shielding).
It was determined that for the optimised pilot eye position the target aircraft (JQF) was not shielded from either pilot in AEM by the cockpit structure during any of the times when the landing light would have been visible.
Figure 58: Visibility windows for JQF landing light from AEM

Source: ATSB
Considering the intensity of the landing light, it is highly likely that, if environmental conditions allowed, the pilots of AEM would have been able to perceive and locate JQF based on its use of the landing light, at least 27 seconds prior to the collision and possibly between 76 and 66 seconds. At these times the ability to detect based on aircraft size alone was unlikely, and other than movement, there was no other specific characteristic that would have diverted attention of either pilot towards JQF.
With the presence of cloud, the effectiveness of the landing light to aid visual acquisition was reduced. The significance of the reduction was dependant on the extent of the cloud, with even a powerful landing light unable to penetrate significant distance through thick cloud. As it was not possible to ascertain the specific extent of the cloud in the vicinity of the accident, the actual detection opportunity offered by the light could not be determined.
Aircraft position assessment
As discussed in the Locating the target aircraft section, the position of each aircraft relative to the other can be used, along with consideration of the viewer aircraft’s structure to determine when the aircraft was visible from a particular pilot’s viewpoint. The azimuth and elevation angles between the 2 aircraft were calculated considering each was the ’viewer’ and the ’target’. These values, based on the smoothed data (see the section titled Position information) are plotted in Figure 59 and Figure 60.
Due to the location of the GPS antennas on the aircraft being close to the pilot’s eye position (within 500 mm) the position of the aircraft and the pilot’s eye position (optimised eye position – see the section titled Refining the pilots’ eye positions) for the purposes of locating the target aircraft have been considered the same. Figure 61 and Figure 62 show the view and target aircraft locations from the optimised pilots’ eye position in AEM and Figure 63 and Figure 64 show the view and target aircraft locations from JQF pilots’ optimised eye positions.
The target aircraft positions have been coloured to indicate that aircraft’s movement over time with the colour transiting from blue through green to red showing times getting closer to the collision. As discussed in the Sun consideration section, the azimuth and elevation angles to the sun were also plotted, indicating the sun’s movement in the field of view over time. As discussed previously, it shows the sun well above and away from the pilot’s viewpoint and entirely obscured by structure.
Figure 59: Azimuth and elevation angles from JQF to AEM

Source: ATSB
Figure 60: Azimuth and elevation angles from AEM to JQF

Source: ATSB
Figure 61: AEM left seat pilot’s view (optimised eye position) with target aircraft and sun positions.

Source: ATSB
Figure 62: AEM right seat pilot’s view (optimised eye position) with target aircraft and sun positions.

Source: ATSB
Figure 63: JQF left seat pilot’s view (optimised eye position) with target aircraft and sun positions

Source: ATSB
Figure 64: JQF right seat pilot’s view (optimised eye position) with target aircraft and sun positions

Source: ATSB
Target shielding
The ATSB’s optimised eye position (see the section titled Refining the pilots eye position) and views as presented in the Aircraft position assessment section, were used for further assessment of the times that the target aircraft would have been shielded from the view of the pilots by the aircraft’s structure. The ATSB reviewed azimuth and elevation angles of the aircraft structure and of the target aircraft, determining when the target aircraft would have been shielded from each pilot.
A series of 8 charts were developed, 2 for each pilot. The first showed the windows during which the target aircraft would, or would not, have been shielded from the approximate time that JQF became airborne until the approximate time of the collision, 260 seconds later (11:20:00‑11:24:20). The second shows the final 15 seconds before the collision, which as discussed in the earlier Aircraft observed size section, is the time when the target aircraft likely became visible to the pilot (assuming no cloud obscuration).
Pilots of AEM
Based on the ATSB’s optimised eye position, the target aircraft sat centrally, but relatively low in the windshield view. The cockpit structure did not shield the target aircraft from either of the pilots. As a result, charts showing target shielding times were excluded from this section of the report.
It is important to note that, while the target aircraft was not shielded from either pilot’s optimised eye positions, it would only have taken a relatively small movement of the head to shield the target for a considerable portion and at key times. The Sensitivity analysis section considers this further.
Pilots of JQF
The manoeuvring flightpath of JQF meant that the target aircraft, while approaching on a relatively stable heading, moved significantly through both pilots’ fields of view (traversing more than 180° of azimuth). For the right seat pilot, the target aircraft was shielded from their view for 95 of the last 260 seconds across 7 different shielding windows by different parts of the cockpit structure.
After 11:23:54 (26 seconds before the collision), when the target aircraft traversed 0.2° of the pilot’s field of view, the target aircraft was shielded for 21 seconds (81% of this time). The aircraft would have emerged from behind the instrument panel briefly approximately 19.5 seconds before the collision for about 4 seconds, but this was only to traverse between the instrument panel and the right pillar.
For the final 15 seconds the aircraft was completely shielded from the right seat pilot by the cockpit’s right pillar. The right pillar traversed approximately 20° of the pilot’s field of vision and immediately before impact the aircraft occupied no more than 9° of azimuth, shielding it completely/near completely from the pilot’s view.
Figure 65 and Figure 66 show the angular size of the aircraft and the time windows when it would have been visible to the right seat pilot for the final 260 seconds and in the final 15 seconds.
Figure 65: JQF right seat pilot’s visibility

Source: ATSB
Figure 66: JQF right seat pilot’s visibility last 15 seconds

Source: ATSB
AEM was shielded from JQF’s left seat pilot’s view by JQF’s structure for approximately 80 of the final 260 seconds split across 6 windows. These windows varied in length from 4.5 seconds to 20 seconds.
Approximately 52.5 seconds or 66% of the time that the target aircraft was shielded was before 11:23:30 when the aircraft would have traversed only 0.1° of the pilot’s visual field. However, different to the right seat pilot, the target aircraft would have become visible approximately 14.5 seconds prior to the estimated collision time. The target aircraft would likely have emerged from behind the instrument panel near the windscreen mounted compass and with an angular size of slightly less than 0.4°.
Figure 67 and Figure 68 show the angular size of the aircraft and the time windows when it would have been visible to the left seat pilot for the final 260 seconds and in the final 16 seconds.
Evaluation
Based on the ATSB optimised eye position there was very limited opportunity for the pilots of JQF to visually detect AEM with sufficient time for the aircraft to be manoeuvred to avoid the collision.
For the right seat pilot, the aircraft was likely entirely obscured during critical phase where it may have been possible to visually acquire the target aircraft and initiate an avoiding manoeuvre. While the left seat pilot probably had a window whereby the aircraft could have been visually acquired and an avoiding manoeuvre initiated, based on the aircraft’s size and the time available, the pilot would have been required to:
- identify an object on the opposite side of the windscreen centre spline of angular size less than 0.5°
- determine it was a threat and initiate a manoeuvre within 15 seconds.
Research suggests that this was possible, however it required that each of these steps was carried out efficiently and there is no delay in the detection of the target or determination of the threat status of the aircraft.
Figure 67: JQF left seat pilot's visibility windows

Source: ATSB
Figure 68: JQF left seat pilot visibility windows - last 15 seconds

Source: ATSB
Relative movement
Relative movement increases the opportunity for visual acquisition of a target. With the position of the target aircraft tracked across the viewer pilots’ field of view at constant, half second, intervals the speed of angular motion can be determined. For the purposes of the study the angular speed of movement was considered as a combination of the change in azimuth angle and elevation angle every 0.5 seconds (Figure 69), which was converted to a value in degrees per second.
Figure 69: Calculation of speed of angular motion

Source: ATSB
As discussed in the Object perception section, relative movement of 0.017-0.034°/ second (1-2 arcminutes/second) can be detected under optimal conditions where the movement is proximal to a stationary reference. A ’stationary reference’ was considered to exist when the target was within 5° of azimuth or elevation of the cockpit structure.
Where such a reference was not available, 0.17-0.34°/seconds (10-20 arcminutes/ second) was required to be detected. For an aircraft, the location of the aircraft structure in the pilot’s visual field will remain constant and so will act as the stationary reference point. As the Aircraft position assessment and target shielding sections discussed, the aircraft’s position in the visual field at defined intervals was known so its angular speed through the visual field could be calculated.
AEM
JQF’s movement across the visual fields of the pilots of AEM was significantly less than AEM’s movement across JQF.
This corresponded to lower angular speeds, with a range of between 0.012 and 10.64° per second, and an average angular speed of less than one third of that of JQF at 0.290° per second. For 12.5 seconds, of the 260 seconds leading up to the collision, the aircraft had an angular movement of less than 0.034° per second (2 arcminutes per second) and was unlikely to have been detectable.
For 65 seconds the target aircraft would have had an angular velocity of greater than 0.34° per second and therefore likely detectable with no stationary reference point. For the remaining time the target aircraft was more likely to be detected if it was proximal to a stationary reference point. Figure 70 and Figure 71 show the angular speed of the target aircraft and the times it was proximal (within 5° of azimuth or elevation) to stationary aircraft structure for the left and right seat pilots.
For AEM’s right seat pilot, as discussed in the Target shielding section, the target aircraft was close to but not obscured by the cockpit structure. For 219.5 of the final 260 seconds, the aircraft was proximal to the cockpit structure. Of the remaining 40.5 seconds, 37 were before 11:21:17.0 which was 182 seconds before the collision when the distance between the aircraft was approximately 12.5 NM and the target aircraft traversed only 0.02° in the pilot’s visual field.
The target aircraft then did not exit the proximal region again until 4 seconds before the collision, however by that time it would have been larger than 1° in the pilots’ visual field and there would have been insufficient time to react to prevent the collision.
For AEM’s left seat pilot the target aircraft was initially close to the centre of the windscreen and moved throughout the final 260 seconds towards the left cockpit pillar. This location limited the opportunity for enhanced visual acquisition due to proximity to cockpit structure with the target aircraft proximal to the cockpit structure for only 47.5 of the final 260 seconds. However, of these 47.5 seconds, 35 occurred over the last 75 seconds before the collision, including all but the last 1.5 seconds of the final 24.5 seconds leading into the collision. As discussed in Aircraft observed size the target aircraft at this point was getting larger and the combination of the movement in proximity to stationary structure increased the visual acquisition opportunity.
Figure 70: Target aircraft structure proximity and angular velocity - AEM right seat pilot

Source: ATSB
Figure 71: Target aircraft structure proximity and angular velocity - AEM left seat pilot

Source: ATSB
JQF
The angular velocity of AEM through JQF’s visual field varied from 0.03 to 10.33° per second with an average of 0.96° per second. Of the final 260 seconds AEM’s angular speed was sufficient to be detectable by the pilots of JQF without a stationary reference point for 184 seconds, or about 71% of the time.
For the remaining 76 seconds the aircraft’s movement through the field could be located if it was proximal to a stationary reference point. Due to the change in the pilot’s eye position from the left to right seat pilot as presented in the Target shielding section, the times when this occurred were different for the left and right seat pilots. Figure 72 and Figure 73 show the times for the individual pilots when the target aircraft was proximal to the aircraft structure and had a lower threshold for detection of relative movement. Both charts show that the closer to the time of collision the more time that the target aircraft spent proximal to, or obscured by, the structure.
For JQF’s right seat pilot the target aircraft was proximal of aircraft’s structure, but unshielded, for 139.5 of the final 260 seconds before the collision. The final time that the aircraft was not proximal to the structure and unshielded was between 34 and 30 seconds before the collision. At this time the aircraft was just over 2 NM away and the size of the target aircraft was approaching 0.2° in the pilot’s field of view, making the presence of the stationary reference of the cockpit structure less necessary for visual acquisition.
For JQF’s left seat pilot, the target aircraft was at the boundary of the aircraft’s structure but unshielded for 127 of the final 260 seconds before the collision. Approximately 15 seconds before the collision the target aircraft emerged from behind the aircraft instrument panel and moved towards the centre of the right windscreen. At this point the target aircraft would have had an angular velocity approximately 4° per second and an angle of 0.4° in the pilots’ visual field.
Evaluation
The movement of both AEM and JQF across the viewer pilot’s visual fields provided relative motion that increased visual acquisition potential. For the pilots of JQF, the target aircraft moved through a larger part of the visual field, and at a greater rate, increasing opportunity based on movement. With a significant portion of this movement proximal to stationary cockpit structure a reference was available for movement to be detected against.
As discussed in the Target shielding section this also meant that the target aircraft spent a significant portion of time obscured from view. This was particularly significant when the aircraft was at the limits of visual acquisition capability, 15-20 seconds prior to the collision. For AEM the target aircraft has less than one-third the average speed of motion in the lead up to the collision. For the right seat pilot, the movement of the target aircraft low on the windshield meant that the instrument panel and the centrally mounted compass provided stationary reference for the target’s movement.
For the left seat pilot, the target aircraft’s position higher in the windscreen meant that there was no stationary reference available for the initial time, however the movement towards the aircraft’s left cockpit pillar meant that at the critical time in the lead up to the collision the aircraft was not only unshielded but also in a position where its relative movement could have attracted the pilots attention.
The utilisation of the 5° proximal window is an important consideration. If the head or eyes were moved or rotated slightly, the stationary reference of the cockpit structure would change and may have obscured the target aircraft. This aspect will be discussed in the following Sensitivity analysis (Movement of the pilot’s eye position) and Field of view sensitivity (Rotation of the pilot’s eyes) sections.
Figure 72: Target aircraft structure proximity and angular velocity - JQF right seat pilot

Source: ATSB
Figure 73: Target aircraft structure proximity and angular velocity - JQF left seat pilot

Source: ATSB
Sensitivity analysis
As introduced in the Refining the pilots’ eye position section, optimised eye positions for each pilot were selected from a matrix of possible positions. The matrix moved the head and associated eye position 0.01, 0.03, 0.05 and 0.10 m along each axis generating 729 different eye positions and views for each of the 4 pilots. The original eye position prior to optimisation has been referred to as the ‘displaced’ eye position.
The following section presents the results of a target shielding analysis done on the displaced eye positions the equivalent of that which was done in the Target shielding section. For the purposes of this assessment the optimised and displaced eye positions are not the eye positions that show the least shielding time or the greatest visibility opportunity for the target aircraft. The purpose of the comparison between the optimised and displaced positions is to demonstrate the difference that small positional changes can make to visibility opportunity.
Through the process of selecting the optimised eye position, investigators reviewed imagery that represented the eye positions at the extremities [20] of the matrix. They examined the difference these made to the detectability of the target aircraft and its likely shielding behind cockpit structure. For example, as would be expected, the lower that a pilot sits in the structure the more shielding is provided by the instrument panel and the less likely an aircraft approaching from below the elevational origin will be detected. This movement in the vertical plane also effects the shielding of other parts of the aircraft structure outside the cockpit such as the wings and engine cowling.
AEM pilots
For AEM’s right seat pilot, displacement was 1 cm back, 3 cm right and 1 cm up (Figure 74). As with the optimised eye position, the target aircraft was not shielded during the final 260 seconds leading up to the impact. However, the displacement placed the target aircraft’s track closer to the central compass and the instrument panel meaning further small movements, particularly vertically, could lead to significant shielding of the target.
For AEM’s left seat pilot, displacement was 1 cm back, 5 cm left, with no vertical position shift. (Figure 75) This equated to a 70 second increase in the time that the target aircraft was shielded from view (Figure 76). Critically, this increase fell entirely within the last 90 seconds prior to the collision. The last practical visual acquisition opportunity before the target aircraft moved behind the left pillar was 27.5 seconds before the collision, when the aircraft made up 0.18° in the pilot’s field of view. The aircraft re-emerged from behind the cockpit pillar 1.5 seconds before the collision (Figure 77), however this did not provide sufficient opportunity for a reaction, let alone an evasive manoeuvre.
Figure 74: AEM right seat pilot ATSB displaced eye position

Source: ATSB
Figure 75: AEM left seat pilot ATSB displaced eye position

Source: ATSB
Figure 76: AEM left seat pilot’s visibility windows – displaced eye position

Source: ATSB
Figure 77: AEM left seat pilot’s visibility windows final 15 seconds – displaced eye position

Source: ATSB
JQF pilots
The shift between optimised and displaced eye position for JQF’s right seat pilot was 1 cm forward, 5 cm left and 3 cm down (Figure 78). This change in positioning equated to an increase in target shielding time of 54.5 seconds with an additional 5 shielded windows over the final 260 seconds, for a total of 149.5 seconds across 12 shielding windows. Critically, the aircraft remained shielded from the right seat pilot for the final 15 seconds prior to the estimated impact.
The last opportunity for the pilot to locate the aircraft would have been approximately 19 seconds before the impact time and the aircraft would have appeared for approximately 3 seconds while transitioning between the instrument panel and the right cockpit pillar. At this time the aircraft would have an angular size of approximately 0.3° in the pilot’s field of view. Figure 79 and Figure 80 show the target viewing windows over the final 260 and 15 seconds respectively.
For the left seat pilot of JQF the shift between optimised and displaced eye position was 5 cm back, 3 cm left and 5 cm up (see Figure 81). This resulted in a decrease in target shielding by 4.5 seconds with one more shielding window, totalling 74.5 seconds over 7 shielding windows. The aircraft would have appeared in the pilot’s view approximately 15 seconds before the impact, at a size of approximately 0.36° in the pilot’s field of view. Prior to this, the aircraft would have been shielded by the instrument panel and the central pillar of the windscreen for approximately 23 seconds. Figure 82 and Figure 83 show the times the aircraft was shielded by the cockpit structure.
Figure 78: JQF right seat pilot ATSB displaced eye position

Source: ATSB
Figure 79: JQF right seat pilot’s visibility windows - displaced eye position

Source: ATSB
Figure 80: JQF right seat pilot’s visibility windows final 15 seconds - displaced eye position

Source: ATSB
Figure 81: JQF left seat pilot ATSB displaced eye position

Source: ATSB
Figure 82: JQF left seat pilot’s visibility windows – displaced eye position

Source: ATSB
Figure 83: JQF left seat pilot’s visibility windows final 15 seconds – displaced eye position

Source: ATSB
Evaluation
The sensitivity analysis identified that even small movements in the pilot’s eye position could have a very significant impact on the target shielding. The left seat position of AEM demonstrated the most significant change to the pilot’s eye position, with an increase in the shielding time of 68.5 seconds. This included almost all the last 20 seconds of flight where the pilot has the best chance of visual acquisition.
By contrast, analysis of the left seat position of JQF shows that similarly small movements in the eye position could reduce the shielding time, with the displaced eye position giving 4.5 additional seconds where the aircraft was visible to the pilot. While this time was not at a critical phase (the aircraft still emerged approximately 15 seconds before the collision), it demonstrated the difference that these small movements could make.
For the right seat pilots a similar contrast was present. For JQF, the movement increased the shielding time by almost a minute (54.5 seconds) throughout the final 260 seconds with much of this increase occurring later in the timeline where it limited visual acquisition opportunity. The right seat pilot of AEM remained entirely unshielded for all the final 260 seconds. Interestingly, this showed the difference that the speed slope windscreen made, one of the reasons that JQF’s shielding time was much higher was that the target aircraft was obstructed by the central pillar of the cockpit as it crossed the windscreen.
Further detail on other eye positions tested are outlined in attachment A to this report.
In summary, this analysis demonstrates the importance of moving the head when scanning and searching. Moving the head changes the location of the shielding obstructions, potentially overcoming the lack of relative movement associated with intercepting courses at constant speed.
Field of view
The aircraft positioning and target shielding considerations to this point have included the entire spherical field around the eye position. However, as discussed in the Field of View section, a person can only see and perceive a certain portion of this area at any point in time. It is therefore important to consider where the aircraft was within the field of view throughout the flight.
As previously discussed, the ATSB has defined 3 areas of the human vision where objects are likely to be located without specifically looking for them and where something on the target will be required to attract attention (such as a strobe light). The area for the full field of view were defined as 190° of azimuth by 135° of elevation. For the inner field a literature review was unable to provide a definitive value for the size of this area, however for this study the size of the inner field was estimated as 60° of both azimuth and elevation evenly distributed around the centre of the field of view. Making up the inner 10° of both azimuth and elevation, the foveal region or the area of highest, daylight, visual acuity was also represented. The following sections show these 3 areas as they relate to the position of the aircraft and the opportunity for visual detection.
The following section and the Field of view sensitivity section that follows present an examination of where the target aircraft likely appeared in the field of view of each pilot, assuming that they were looking out of the windscreen. Given the stage of each flight, with AEM preparing to conduct an instrument approach, and JQF conducting an instrument departure, it must be considered that each of the left seat pilots were likely spending more time conducting instrument scans than visual scans outside the window. While this limits how effective this assessment was for the accident case, it also demonstrates the importance of scanning through the whole visual field to best aid visual traffic acquisition.
AEM
Figure 84 and Figure 85 show the pilot views from AEM with the outer, inner and foveal regions of the field of view identified. The target aircraft fell within the inner field for the entire 260 seconds. Therefore, the pilot should have been able to perceive it when it was of a sufficient size to be located. The foveal region is the area of maximum visual acuity and where objects are most likely to be detected.
For both the left and right seat pilots of AEM, JQF spent most of its time on or within the boundaries of this area. For AEM’s pilots the target aircraft was within the foveal region for 154.5 of the final 260 seconds. This included the first 147.5 seconds, 6 seconds between 11:23:40 and 11:23:46, and the last second before the collision. Upon exiting the foveal region at this time, the target aircraft proceeded to a maximum of 16° to the left of the centre of field of view before coming back towards the centre of the field.
Figure 84: AEM left seat pilot - fields of view – optimised eye position

Source: ATSB
Figure 85: AEM right seat pilot - fields of view - optimised eye position

Source: ATSB
JQF
Through the final 260 seconds, AEM transitioned through 101° of azimuth from -64.1° to 36.4° and 22° of elevation from 7° to ‑15°. As the target’s elevation remained entirely within the inner field of view, the further analysis will only consider its positioning for azimuth.
The target started in the outer field of view, initially moving to the left and a minimum azimuth value of -64° before increasing elevation and transiting back towards the inner field of view. The aircraft entered the inner field of view on the left of the pilot’s view (-30° azimuth) at approximately 11:21:16, looping further into the region and back out again, exiting into the outer field of view at 11:21:50. After 7 seconds the target re-entered the inner visual field and passed through the foveal region from 11:22:19 to 11:23:09 and continued across the inner field of view, exiting at 11:24:05, and continued in the outer field of view until the collision.
As the inner visual field is the area that a pilot is likely to be able to detect an object without having attention specifically drawn to it, the timings and size of the target aircraft within this area are critical. At 11:21:16 when the target aircraft entered the visual inner visual field it made up only 0.02° of the pilot’s visual field - a size that is very unlikely to be detectable. 41 seconds later, when the aircraft re-entered the inner visual field it had almost doubled in size to 0.035° in the pilot’s visual field. The size continued to increase as the target crossed the inner and foveal fields.
By the time the target exited the inner field of view at 11:24:05, it was 0.35° in the pilot’s field of view and at a size that was likely detectable. This has not considered shielding of the target aircraft by the cockpit structure, which will vary between the 2 pilots. For the left seat pilot of JQF, of the 162.5 seconds that the aircraft traversed through the inner and foveal regions it was shielded by cockpit structure for approximately 40% of this time by the left windscreen pillar, instrument panel and the centre windscreen pillar and compass.
For the right seat pilot of JQF, of the 162.5 seconds that the aircraft is traversed through the inner and foveal regions, it was shielded by cockpit structure for over 35% of this time, by the centre windscreen pillar and compass, the top of the instrument panel and the right windscreen pillar.
Figure 86 and Figure 87 Show the field of view from the left and right seat pilots of JQF and the time window through which the target aircraft was traversing the inner field of view.
Figure 86: JQF left seat pilot - fields of view – optimised eye position

Source: ATSB
Figure 87: JQF right seat pilot - fields of view – optimised eye position

Source: ATSB
Field of view sensitivity
The earlier Sensitivity analysis section considered the movement of the pilot’s eyes while facing forward. Rotation of the head and eyes will have different effects on the field of view. Due to the distance of the eyes from the axis of rotation (centre of the neck) rotating the head will affect both the field of view and the location of the eyes, affecting the position of the ‘target’ aircraft and the location of the ‘viewer’ aircraft structure. The field of view can also be affected by rotation of the eyes themselves, however this only affects the field of view and not the position of the ‘target’ aircraft or structure.
As the head is rotated about its horizonal axis the eyes, being forward of the axis, will move in the x-y plane relative to their original position. Figure 88 shows a highly stylised example of the effect that a 30° rotation can have on X and Y positions of the eye relative to the heads point of rotation. An equivalent movement of the eyes will occur in the Y-Z plane when the head is rotated about its vertical axis. Discounting binocular vision considerations, which for the purposes of this section are considered negligible, these movements of the eye position will have the same effect as the movements of the eye position discussed in the Sensitivity analysis section. The rotation of the field of view that occurs with the rotation of the head will also occur when the eyes are rotated independently of the head.
Figure 88: Example of eye position displacement due to head rotation (top down view).

Source: ATSB
If the eyes are rotated about their own axis this movement will not induce a movement affecting the eyes position only the field of view, subsequently position of the target aircraft and the cockpit structure do not change. However, the position within the field of view will change. As discussed in earlier sections, the appearance of objects in different areas of the visual field can make them more or less likely to be detected by the pilot.
Figure 89 shows a highly stylised image of the effect that a rotation of the eyes horizontally has on the field of view. A 30° rotation has been used to show the effect of the rotation more clearly on the field of view, the following analysis will consider rotations up to 9°. Rotation of the eyes about their horizontal axis will affect the field of view in the azimuth plane while rotation about the eyes vertical axis affect the elevation angle. Note the constant eye positions as the head has remained stationary against the rotated field of view.
Figure 89: Field of view change with eye rotations (top down view.)

Source: ATSB
The ATSB considered a matrix of eye rotations that moved the field of view 3, 6 and 9° in both the positive and negative directions of azimuth and elevations and analysed the resultant effect. This produced 49 different fields of view, but as per the previous analysis these rotations have only been applied to the ATSB’s optimised eye position for each pilot.
The analysis below considers the extremities of rotations, separately considering the changes to detectability of the aircraft based on its position in the differing fields of view. While this provides an insight into the detectability and location, it only considers a snapshot in time at the maximum value examined. In a real-world scenario, the pilot’s head and eyes will constantly move and rotate through the scanning process, combining the effects of the Sensitivity analysis, the discussion of head rotation presented above and the eye rotations that will be explored below. Throughout a flight pilots will also look at various instruments or systems in the cockpit, other flight crew members or passengers constantly changing the field of view and the focus location.
AEM
The comparatively small movement of the target aircraft through the field of view of AEM’s pilots meant that the rotations made relatively little difference to what area of the pilot’s field of view the target aircraft appeared. The negative azimuth rotations brought the later locations of the aircraft more into the foveal field than the original viewpoint. A negative azimuth rotation of 9°, as shown in Figure 90 and Figure 91, increased the amount of time that the aircraft spent in the foveal region from 154.5 seconds to 244.5 of the final 260 seconds.
The 15.5 seconds that the aircraft did not spend in the foveal region was the first 15.5 seconds of data recorded and would have been at a time when the aircraft would not have been detectable due its angular size in the pilot’s view. At this rotation the target aircraft moved into the foveal region at approximately 11:20:15.5 when the aircraft were separated by approximately 16 NM. It remained in the foveal region until the estimated time of collision. For the left seat pilot, this eye rotation also brought the left cockpit pillar into the foveal region. While it did not impact target aircraft visibility, the appearance of the stationary structure in the key part of the visual field may have had 2 effects:
- provided a better capacity for the detection of relative movement by making the stationary object more obvious.
- increased the likelihood of a focal trap with a stationary object being so prominent, which would reduce opportunity for detection.
For the right seat pilot, this brought the centrally‑mounted compass into the field of view, which would have a similar impact as a static point in the field of view.
Figure 90: AEM left seat pilot FOV azimuth (Az) -9° elevation (El) 0°

Source: ATSB
Figure 91: AEM right seat pilot FOV Az -9° El 0°

Source: ATSB
Rotating the eyes positive 9° of azimuth, as shown in Figure 92 and Figure 93, located the target aircraft within the foveal region for the first 52.5 of the final 260 seconds. While the target exited the foveal window, it remained within the inner field of view where the likelihood of detection remained good.
For both the left and right pilots, this brought elements of the cockpit structure into the foveal view. For the left pilot, part of the compass was within the foveal region and for the right pilot, part of the right pillar and instrument panel were then in the foveal view. While these were then visible within this region, they were also away from the position of the target aircraft so their effectiveness in assisting detecting relative movement would have been minimal.
Figure 92: AEM left seat pilot FOV Az 9° El 0°

Source: ATSB
Figure 93: AEM right seat pilot FOV Az 9° El 0°

Source: ATSB
As with azimuthal rotation, elevational rotation only significantly affected how much time the target aircraft spent in the foveal region. As above, rotation of the pilot’s eyes was considered 9° above and below the elevational origin.
Rotating the pilot’s eyes 9° above the origin is equivalent to the pilot scanning towards a distant location or the horizon, as shown in Figure 94 and Figure 95. For this rotation the target aircraft was within the foveal region for 34.5 of the last 260 seconds. Of these 34.5 seconds, 33.5 of them were within the first 2 minutes following JQF’s take-off when the aircraft was outside of visual range. The final second within the foveal region was at 11:21:17, 3 minutes and 3 seconds before the estimated collision time. At this time, the target aircraft would have an angular size of only 0.02° in the field of view and so was likely undetectable.
A rotation of 9° below the origin, as shown in Figure 96 and Figure 97, is the equivalent of a pilot looking at instruments in the top part of the instrument panel. At this rotation the target aircraft was within the foveal region of 150 of the final 260 seconds. The target aircraft was in the foveal region across 3 windows. The first 2 of these windows totalled 144 seconds and were completed before 11:22:27 when the aircraft was 0.04° in the pilot’s field of view. The remaining 6 seconds were between 11:23:40 and 11:23:46, where the aircraft ranged between 0.12 and 0.16° in the pilot’s field of view
For both pilot’s this field also brought a portion of the instrument panel into the foveal region, providing a stationary structure in the field of view. The advantage of this would have been greater for the right seat pilot, with the movement of the aircraft closer to the stationary structure than for the left pilot.
Figure 94: AEM left seat pilot FOV Az 0° El 9°

Source: ATSB
Figure 95: AEM right seat pilot FOV Az 0° El 9°

Source: ATSB
Figure 96: AEM left seat pilot FOV Az 0° El -9°

Source: ATSB
Figure 97: AEM right seat pilot FOV Az 0° El -9°

Source: ATSB
JQF
The effect of the eye rotations was greater for the pilots of JQF, with the target aircraft moving not only though the foveal region but also from outer region to inner region and back out again. As discussed in the Target shielding section, for the optimised eye position, the target aircraft was shielded during multiple windows to both pilots of JQF. While the rotation of the eyes did not affect the relative position of the target or the structure, the timings when the aircraft was more likely to be detected were dependent on what part of the visual field it was in.
If the aircraft was shielded while it was in the foveal or inner regions it was less likely to be detected. As with the AEM examples, the following sections consider the effect of positive and negative 9° rotations in both azimuth and elevation angles. These will show the extremities of the movement examined in a real-world scenario as a pilot rotated their eyes to scan or look out the cockpit and subsequently the visual field will move through these rotations and viewpoints.
A positive azimuth rotation of 9° retained the aircraft within the full visual field for its entire trajectory. The target aircraft entered the inner field of view at 11:21:20, 179.5 seconds before the collision and exited the inner field at 11:21:35. During this time it remained unshielded to the left seat pilot but was shielded for the entire time from the right seat pilot by the centre spline of the windscreen and the centrally mounted compass. The target then re-entered the inner visual field at 11:22:06, 134 seconds before the collision and remained in the inner field until the collision. While during this time it was shielded from the right seat pilot for 53 seconds and from the left seat pilot for 48 seconds.
Within this final 134 seconds the target aircraft moved in and out of the foveal region twice totalling 21 seconds within the foveal region. Of these 21 seconds, for the right seat pilot 8 of them were calculated as shielded by cockpit structure. For the left seat pilot, the target aircraft was shielded for 19.5 seconds. The target aircraft exited the foveal region at 11:23:54, 26 seconds prior to the collision. From this time until the collision, the target aircraft was shielded from the left seat pilot for 11 seconds and from the right seat pilot for 21 seconds. Figure 98 and Figure 99 show the left and right seat pilot’s views with a positive 9° azimuthal rotation.
Negative azimuth rotation of 9° retained the target aircraft within the full field of view for its whole trajectory. With this shift, the target aircraft exited the inner field before the time of the collision. The target aircraft remained in the inner or foveal visual field for 134 seconds split over 2 windows. The first, 122.5 seconds, starting at 11:21:12 and exiting at 11:23:14.5, approximately 66 seconds before the collision. Of this time the target aircraft was obscured by cockpit structure for 46.5 and 38.5 seconds to the left and right seat pilot’s respectively.
The second entry to the inner field was for 13.5 seconds. The target aircraft entered at 11:23:46 and exited at 11:23:59.5, approximately 21 seconds before the collision. Of this time the target was shielded by structure for 11.5 and 4.5 seconds to the left and right seat pilot’s respectively.
The aircraft was in the foveal region of the visual field for 62.5 seconds split over 2 windows. The target entered the foveal region for 9 seconds, entering at 11:21:22.5 and exiting at 11:21:31.5, 168.5 seconds before the collision. Of these 9 seconds the target was shielded by cockpit structure for the whole time to the right seat pilot and remained unshielded to the left seat pilot.
The second entry to the foveal region lasted 53 seconds, entering at 11:22:08 and exiting at 11:23:00.5, approximately 79.5 seconds prior to the collision. The target aircraft was shielded by cockpit structure for 5.5 and 12 seconds from the view of the left and right seat pilot’s respectively. Figure 100 and Figure 101 show the left and right seat pilot’s views with a -9° degree azimuthal rotation.
Figure 98: JQF left seat pilot FOV Az 9° El 0°

Source: ATSB
Figure 99: JQF right seat pilot FOV Az 9° El 0°

Source: ATSB
Figure 100: JQF left seat pilot FOV Az -9° El 0°

Source: ATSB
Figure 101: JQF right seat pilot FOV Az -9° El 0°

Source: ATSB
The maximum and minimum elevation values of the target aircraft were 7 and -15° respectively. Therefore, rotations in this direction were less likely to affect the pilot’s visibility windows than movements in azimuth. A rotation of 9° below the elevational origin indicated 3 windows in which the target aircraft was in the pilot’s inner visual field and one where it was in the pilot’s foveal region.
The first window, between 11:21:16.5 and 11:21:50.5 (34 seconds), finishing approximately 210 seconds before the collision. Within this period, the target aircraft was shielded by structure for 11 and 17 seconds for the left and right pilot’s respectively. Through this window the maximum angular size of the aircraft was 0.033°, well below the detectable threshold.
The second window was 128 seconds, between 11:21:57 and 11:24:05, ending approximately 15 seconds before the collision. Throughout this window the target aircraft was shielded by structure for 52.5 and 39.5 seconds to the left and right seat pilot’s respectively. At the time the aircraft exited the inner field it had an angular size of approximately 0.35°.
The final entry into the inner field was 0.5 seconds at 11:24:18 approximately 2 seconds before the collision. The target would have been visible to the right seat pilot and shielded from the left seat pilot. The angular size of the aircraft would have been approximately 4.5°, making it easily detectable. However, by this time it would not have been possible to execute a successful evasive manoeuvre.
During the second movement of the target aircraft through the inner visual field it also traversed the foveal region between 11:22:19.5 and 11:23:10. Within these 51.5 seconds the aircraft was shielded by cockpit structure for 14.5 and 11.5 seconds for the left and right seat pilots respectively. Figure 102 and Figure 103 show the left and right seat pilot’s views with a -9° elevational rotation.
The final rotation that has been considered in the sensitivity analysis is positive elevation rotation of 9°. This rotation was considered important to review as the location the target aircraft was just below the elevational origin leading up to the final part of the track. The data indicated that with this rotation the aircraft entered and exited the inner field at the same times as the previous rotation. This was to be expected due to the relatively small changes in elevation over time compared to azimuth and the size of the inner visual field.
Due to the position of the target aircraft in the visual field for this eye position the target aircraft did not enter the foveal region at any during time during the final 260 seconds leading up to the collision. As shown in Figure 102 and Figure 103, the rotation at certain points would only have to be slightly less in this direction and it would have fallen into the pilot’s foveal field.
Figure 102: JQF left seat pilot FOV Az 0° El -9°

Source: ATSB
Figure 103: JQF right seat pilot FOV Az 0° El -9°

Source: ATSB
Figure 104: JQF left seat pilot FOV Az 0° El 9°

Source: ATSB
Figure 105: JQF right seat pilot FOV Az 0° El 9°

Source: ATSB
Evaluation
Accurately tracking the movement of the pilots’ head and eyes, was not possible with the available information. Based on the previous positional analysis of the pilots’ eyes, an optimised eye location was chosen and subsequently a series of rotations of the eyes were considered to assess what effect they might have had on the target aircrafts visibility. The presentation of the extremities of these rotations indicates what the maximum effect was likely to be. However, as previously stated, the actual rotation would probably have been constantly changing as the pilot scanned both inside and outside the aircraft.
For the occupants of AEM these rotations were only likely to have altered when the target aircraft was within the region of highest visual perception (foveal region). Additionally, they also had the potential to alter where in the field of view parts of the aircraft structure sat and subsequently affected the possibility of detection of the aircraft through either the identification of relative movement or the creation of a possible focal trap near the position of the aircraft.
For JQF’s pilots, due to the amount of the field of view that the target aircraft traversed, the impact of these rotations on the time that the aircraft was in the inner field of view was more significant. The negative azimuthal rotations brought the target aircraft into the inner field sooner. For the left seat pilot this was negated by the presence of aircraft structure but for the right seat pilot it was unshielded.
However, the target aircraft also departed the inner visual field sooner when its relatively smaller size made it less detectable. Conversely, the earlier detection opportunity by the right seat pilot had minimal impact on them due to shielding of the aircraft structure, for the final part of the flight path. The left seat pilot had less obstructions once the target aircraft moved out of the inner visual field, but the position of the target aircraft, first behind the centre windscreen spline and then behind the instrument panel further limited opportunity for detection.
The movement of the foveal fields of view with the elevational change was most pronounced with the increase in elevation. The movement of the eyes upward took the target aircraft entirely out of the foveal region. While this would not have prevented the aircraft from being detected, as it could still be in the inner field, at distance and during daylight the foveal area offers the best opportunity for detection.
Cockpit display of traffic information study
Alerting
The concept of internal and external alerting was previously discussed in the Avoidance Alerting section. This section will focus on internal alerting systems but as detailed previously, these work in conjunction with external alerts to assist in the development of the mental model. In the lead up to this accident the occupants of both JQF and AEM were provided with radio advice (external alerts) via air traffic control identifying the presence and approximate location of the other aircraft.
In addition to these alerts, in the 4 minutes leading up the collision the controller also received 2 short term conflict alerts (STCA) on the 2 aircraft. [21] These were not passed through to the pilots, nor were they required to be (refer to investigation report for further details). Subsequently, they were not considered further as a potential source of external alerting.
The radio communications provided by the controller were one potential source of external alerting. Communications on a common frequency (CTAF), whether directed to the receiver or simply overheard, also assists pilots to develop an accurate mental model of the surrounding traffic. The pilots of JQF and AEM were managing 2 or 3 different frequencies respectively. Both aircraft communicated with the Melbourne Centre controller, and procedurally were required to broadcast on the Mangalore Airport CTAF.
Additionally, as they were inbound to Mangalore Airport, the pilots’ of AEM, would probably have accessed broadcast weather information, which was on a separate frequency. Even with dual radios, the need to engage with different frequencies limited the pilots’ opportunity to establish communications with one another or hear information from another aircraft (or ATC) that may have assisted in the development of their mental model.
As the ATSB concluded that the pilots did not establish communications with each other on the CTAF or other frequencies, it was assumed for the purposes of this study that the only external alerts received were the individual communications with the controller on the Melbourne Centre frequency. Considering this scenario, the pilots’ mental model of the location of the other aircraft was developed with limited information. Further, in the key moments just before the collision, when the aircraft were of a detectable size, the only provided traffic information was 2‑5 minutes old, limiting its effectiveness to assist visual acquisition.
Internal alerting
The ATSB considered 2 options for internal alerting systems that were available, but not fitted or in use at the time of the accident. The first was an EFB application and attached ADS-B IN device providing information to the pilot. However, due to the lack of alerting functions on commonly utilised EFBs at the time of the accident, and the number of different available options, replication of one EFB application would not necessarily have been representative. It was therefore decided to replicate an approved and RTCA DO-317B‑compliant system [22] (see the following section) to demonstrate a best practise example of how ADS-B IN traffic alerting can significantly enhance situational awareness.
The presented imagery illustrates the system as it would have appeared to the pilots and how it would have reacted to the presence of the other ADS-B OUT equipped aircraft. It will also detail what alerts and associated information would have been displayed in accordance with the standard. The appearance and displayed information for individual systems, or implementations, may be different to that presented.
CDTI and ATAS in built – RO-317B compliant
Using the ADS-B position and altitude data calculated in the Aircraft performance study, the ATSB developed input data for a simulation program based on material provided by the RTCA (formerly Radio Technical Commission for Aeronautics) and NTSB for demonstration purposes. To improve the realism of the simulation, the ATSB also added in ADS-B returns for other aircraft in the area that were detected by the Airservices network.
The presented display (Figure 106) depicts 3 range rings at 15, 6 and 2 NM around the viewer aircraft. These range rings are normally adjustable using the zoom level of the display however, for the purposes of this demonstration the zoom functionality has been disabled. The simulated CDTI display shows the position and orientation of each aircraft (target) relative to the viewer aircraft. Beside the traffic icon (blue unfilled arrowhead), there is information about the aircraft. This can display a range of parameters, but in this case has been limited to only show vertical proximity and tendency. The number beside the aircraft shows the vertical proximity in 100 ft increments either above (+) or below (-) and the arrow shows vertical tendency - up arrow, indicating climbing, and down arrow, indicating descending, at more than 500 feet per minute.
The display has 3 levels of alert or display change to assist the pilot. The first is a transition from traffic to proximal traffic. This identifies that another aircraft has moved to within 6 NM and 1,200 ft of the viewer aircraft. This does not trigger an aural alert but changes the display of the target aircraft from a blue outlined arrowhead to a blue filled arrowhead. Within this zone the ATAS system calculates 2 separate radii around each of the target aircraft called the protected airspace zone (PAZ) based on target closing speed and distance and the collision airspace zone (CAZ) defined as a 500 ft radius around the target and 200 ft vertically. These zones are continuously redefined based on updated ADS‑B information received about each target aircraft.
Once the aircraft is projected to breach either the PAZ or CAZ around a target aircraft within the next 15 seconds an audible alert is triggered in the ATAS system. If the system is linked to a CDTI, the CDTI will also show a change in the target aircraft symbol. If the breach is projected to occur in more than 15 seconds the ATAS will hold the alert until a second predicted breach is received at which point the system will alert. This is designed to limit nuisance alerts.
This alert tells the pilot the relative bearing (in clock co-ordinates), distance to, relative vertical position, and current activity (climbing, descending or level) of the target aircraft. The identifier on the CDTI screen also changes from a blue filled arrow to a yellow arrowhead in a circle.
Based on these requirements and the calculated aircraft positions for both aircraft the ATSB has developed CDTI and ATAS simulations of the final 260 seconds of the accident flight.
The following figures show the exemplar CDTI displays at key moments throughout the sequence. Specifically, when the aircraft would have become visible on each other’s CDTI displays and when PAZ and CAZ breach alerts, provided audibly to the pilot as well as displayed on the CDTI, would have been triggered.
Figure 106 shows the CDTI displays of both AEM and JQF at 11:20:01, (259 seconds before the collision), the approximate take‑off time of JQF. At that time, no ADS-B equipped targets would have been displayed.
Figure 106: CDTI displays at 11:20:01

Source: ATSB
Figure 107 shows the CDTI displays at 11:20:43 (3 minutes and 37 seconds before the collision) when the target aircraft first became visible on the display at 15 NM from the viewer aircraft with about 4,600 ft vertical proximity.
Figure 107: CDTI displays at 11:20:43

Source: ATSB
Figure 108 shows the CDTI displays when the aircraft transitioned to proximal traffic, with the target aircraft showing as a blue filled arrowhead while other ADS-B traffic on the screen remained unfilled. Note: at that time the target aircraft was inside the 6 NM range ring and had a vertical proximity indication of +/- 12 (indicating traffic is 1 200 ft above or below). The one second time difference between the change to proximal traffic on the displays (11:23:38 – JQF and 11:23:39 - AEM) was due to the resampling during the data processing for the animation making the transition appear one second later on the AEM display.
Figure 108: CDTI displays at change to proximal traffic

Source: ATSB
Figure 109 shows CDTI displays and associated alert at the time the aircraft were projected to breach the PAZ the around the target aircraft as defined by the closing speed of approximately 245 kt. Note the change in display of the target aircraft to the more prominent yellow, clearly identifying it from other ADS-B traffic. The text shown on the display would have been enunciated through the pilot’s headset or the internal communications system and is not displayed on screen.
There is also a slight variation in the times that this alert occurs for the 2 aircraft (2 seconds, 11:23:48 – JQF and 11:23:50 – AEM). This is most likely due to differences in estimation of future track points for each aircraft and associated projected PAZ breaches.
Figure 109: CDTI displays at the time of the PAZ breach alert

Source: ATSB
Figure 110 show CDTI displays and associated alert at the time that the viewer aircraft projected a breach of the CAZ around the target aircraft. Note the aircraft remained in the highly visible yellow colouring. Again, there is a slight variation in the times that this alert occurs for the 2 aircraft (2 seconds, 11:23:54 – JQF and 11:23:56 – AEM). This is most likely due to differences in estimation of future track points for each aircraft and associated projected CAZ breaches.
Figure 110: CDTI displays at the time of the CAZ breach alert

Source: ATSB
Animation Development
To assist in the visualisation and understanding of the accident sequence and to give a more realistic visualisation of what pilots may have seen, the ATSB developed an animation of the final 260 seconds leading up to the accident. This animation was developed using Microsoft Flight Simulator X (FSX) software using the optimised eye position of each of the 4 pilots involved. The animation development consisted of 4 parts:
- flight path development and integration
- cockpit visualisation and modelling
- environmental condition modelling and visualisation
- recording and integration with animated CDTI display.
The following sections briefly outline how each of these were carried out and what information was used in their development.
Flight path development and integration
Through the Aircraft performance study, the ATSB developed a smoothed flight path based on ADS-B data for both aircraft. FSX does not have a native ability for flight paths to be imported and have aircraft fly them. To enable this, the ATSB utilised a third party add‑on application called FS Recorder [23] to import and record the flight paths with cockpit views from each pilot’s position.
Cockpit visualisation and modelling
Aircraft selection
The animation relied on the viewer seeing a representative target aircraft. Neither a D95A Travel Air or a PA-44 Seminole were native to FSX and so representative models had to be sourced. Due to functionality built into FSX users could develop or modify aircraft to suit their needs. A Piper PA-44 Seminole model was able to be located and freely available for download. [1] This model was utilised for external modelling purposes, with the cockpit panels replaced with ATSB developed cockpit masks (see the section below titled Cockpit masks).
An FSX‑compatible model of a D95A Travel air was not able to be located. Consequently, a Beechcraft Baron, which was provided native with FSX, was used for this animation. The Baron fuselage is approximately 600 mm longer than the Travel Air, but both have the same twin engine, low wing configuration. The ATSB assessed that the differences between the 2 aircraft would have little impact on the animation. Internal cockpit views were removed and replaced with the ATSB cockpit mask of the Travel Air.
Aircraft lighting
As discussed previously in the Aircraft lighting section, lights provide enhanced opportunity for visual acquisition of the target aircraft. FSX has functionality to allow aircraft lighting to be simulated and activated, this included landing, position, and anti-collision strobe lights. As it was determined that JQF’s landing light may have provided AEM’s pilots an improved opportunity for visual acquisition, consideration was given to utilising lighting on the model of JQF. However, testing identified that the simulated lights were lower power than those on the aircraft and unlikely to be representative of that fitted to JQF. Consequently, the final animation was created with all lighting switched off.
The model used to simulate AEM also had lighting available however this lighting was not representative of that which was fitted to the accident aircraft. Due to this and the previous determination that lighting installed on AEM was unlikely to have provided any detection advantage for the JQF pilots it was also switched off for the development of the animation.
Camera positions
The camera position of FSX was used to replicate the pilots eye positions. The standard FSX camera position provided visualisation of a maximum of 90° horizontally and approximately 54° vertically. [25] The process of calculating these angles was developed by the NTSB and is described in Appendix B of O’Callaghan, 2020 supported by Hestnes 2011. Horizontally, the 90° was split either side of the zero-point, giving a view of azimuth values from -45 to 45°. Where objects lay outside this, they were not visible to the viewer unless the camera was rotated, or the field of view was expanded.
Rotating the field of view allows the viewer to see objects within that new area, however it removes the portion of the screen that the camera has been rotated away from. To best recreate the visual field a second camera, and in this case a third, co-located with the first but rotated through a set angle was used. The second camera was rotated 90° positive giving a view of 45 through 135° of azimuth. The third camera was rotated through 90° negative giving a view of -45 through -135° of azimuth. The view of the second and third cameras were located on separate displays of the same resolution placed to the appropriate side of the main displays. This provided a view of 270° of azimuth with 54° of elevation, further cameras and screens can be used to show more of the visual field however in this case it was not considered necessary. The simulated views on each screen were recorded concurrently.
It is important to note that the rotation of the cameras leads to discontinuities in the visualised image, most notably the apparent rotation and position of the horizon line as viewed from the cockpit. This apparent rotation is due to the projection of the horizon line onto a flat surface as they are recorded. If the 2 screens to either side of the main view are located physically at 90° to one another, the effect is less pronounced. Figure 111 and Figure 112 show the 270° from both AEM and JQF at the start of the animation.
Figure 111: 270° view from AEM depicting terrain and meteorological conditions

Source: ATSB
Figure 112: 270° view from JQF depicting terrain and meteorological conditions

Source: ATSB
Cockpit masks
With cameras positioned, cockpit masks were developed and placed over the cameras view to represent the physical obstruction to the pilots’ sight lines from the cockpit structure. FSX and the various aircraft came with native cockpit layouts or panels that aimed to provide the user with a realistic experience. However, the dimensional accuracy of these cockpit layouts was not known so they could not be relied upon for visualisation. These cockpit views are stored within the aircraft file structure as image files that are loaded for the aircraft when the flight is created.
Using the cockpit imagery, the 3-dimensional models developed from the laser scan data and optimised pilot’s eye position, the ATSB created dimensionally accurate cockpit masks as the pilots would have experienced them. The masks were then scaled to the correct size for the visual field displayed by each camera view and placed in the aircraft’s file structure in place of the existing panels.
The cockpit mask was created as a single bitmap image. FSX defines a specific colour (black) as transparent, giving an unobstructed view in these areas. Any other colours in the mask will show as solid colour with their transparency able to be adjusted from solid to fully transparent. To allow the viewer to get a better understanding of when the target aircraft is shielded by the structure and where it is located behind the structure, for the purposes of the animation, the transparency of the cockpit mask was set to 30%.
Figure 113 shows a single panel cockpit mask as developed for the left seat pilot of AEM. Note the black areas that FSX recognises as fully transparent. This mask was overlaid on the central screen depicting azimuth angles of -45° through 45°. Figure 114 shows the complete mask that is sectioned for the 3 screens and depicts as 270° of azimuth -135° through 135°. Figure 115 and Figure 116 show the cockpit mask panels with a transparency of 30% overlaid on the simulated views from AEM and JQF at the start of the animation.
Screen resolution
When projected onto a display the target aircraft can only become visible to the viewer when it reaches the size of one pixel. With a full high definition screen (resolution of 1920 x 1080 pixels) and a FOV of 90° per screen, each pixel makes up approximately 0.047° (approximately 3 arc minutes) of azimuth. This is well below even the ideal size of human perception of 0.2° (12 arc minutes), as discussed in the Object perception section. Due to this, the utilisation of a higher resolution screen was not considered necessary. Based on the ATSB analysis, JQF occupied one pixel in the AEM animation at approximately 11:22:29.50 (129.5 seconds into the animation), and AEM reached the size of a pixel in the JQF animation at 11:22:31.50 (131.5 seconds into the animation).
Figure 113: Scaled central cockpit mask left seat pilot (LSP) of AEM (depicting azimuth -45 through 45°)

Source: ATSB
Figure 114: Scaled cockpit mask of LSP of AEM (depicting azimuth -135 through 135°)

Source: ATSB
Figure 115: Cockpit mask overlaid on 270° view from AEM (260 Seconds before collision)

Source: ATSB
Figure 116: Cockpit mask overlaid on 270° view from JQF (260 Seconds before collision)

Source: ATSB
Condition modelling and visualisation
FSX has the capability to model terrain, sun position, based on date and time, and meteorological conditions. While this is designed to improve the user’s simulation experience it also allows for more accurate recreation of real-world conditions. To accurately represent the desired conditions wind, cloud, rain, and certain other parameters can be modified based on the user’s preference. Using this functionality, the ATSB developed 3 scenarios.
The first was in accordance with the conditions recorded by the Mangalore Airport weather station at the time of the accident. The conditions were inputted into the FSX weather simulation process using base altitudes, cloud types and ceilings estimates based on available imagery and an assessment of whether the cloud layers continued to the base of the next layer.
The second considered the scenario outlined at the start of the Cockpit visibility assessment section, with a cloud layer being present but at a sufficient altitude that the aircraft’s line of sight was not be obscured. An overcast cloud level was set at 5,000 ft and the animation was repeated with these conditions. Finally, to give an indication of the effect of the cloud compared to a clear day, all weather was switched off and the simulation was repeated with sky clear conditions. Figure 117, Figure 118 and Figure 119 show the conditions from AEM at the start of the 3 simulations and Figure 120, Figure 121 and Figure 122 show the conditions from JQF at the start of the simulations. These figures use the left seat pilot’s viewpoint.
Figure 117: View from AEM with simulated conditions – 260 seconds before collision

Source: ATSB
Figure 118: View from AEM with 5,000 ft cloud level – 260 seconds before collision

Source: ATSB
Figure 119: View from AEM with clear conditions – 260 seconds before collision

Source: ATSB
Figure 120: View from JQF with simulated conditions – 260 seconds before collision

Source: ATSB
Figure 121: View from JQF with 5,000 ft cloud level – 260 seconds before collision

Source: ATSB
Figure 122: View from JQF with clear conditions – 260 seconds before collision

Integration of CDTI displays
As outlined in the CDTI section, the ATSB developed cockpit displays and alerting functionality for both aircraft for the final 260 seconds of the flight. The timestamps between the CDTI data and the cockpit animations were aligned, and the 2 animations were overlayed to show the alerts in real time.
Results
The animation, combined with the CDTI displays, were played back in real time and recorded by investigators. The following show the views from both AEM and JQF at critical times in the lead up to the collision. The figures below show the outlook from AEM and JQF, as per the accident conditions simulation, (centre panel of the animation) at:
- the times that the target aircraft transitioned to proximal traffic on the CDTI
- the times that the PAZ and CAZ breaches were projected and the accompanying ATAS alerts received
- 13 (chosen as based on the research it is the last opportunity to detect and have sufficient time to avoid), 10, 5 and 1 second before the collision.
The target aircraft’s location has been identified with a red circle. Figure 123 to Figure 136 [26] show views from AEM at these key times and Figure 137 to Figure 150 [27] show the view from JQF. Examples showing the same set of imagery, but for clear skies, can be found in an attachment to this report.
While the animation resolution is not as great as the human eye, it clearly shows the limitations of visual acquisition of target aircraft, regardless of the external conditions. The alerting capability of the CDTI and ATAS not only gives the pilot significantly greater warning about the presence of an aircraft but also provides them with a location and altitude to assist in visual acquisition and avoidance of the target.
Video animation 1: The collision as viewed from VH-AEM right seat.
Source: ATSB
Video animation 2: The collision as viewed from VH-AEM left seat.
Source: ATSB
Video animation 3: The collision as viewed from VH-JQF right seat.
Source: ATSB
Video animation 4: The collision as viewed from VH-JQF left seat.
Source: ATSB
Conclusion
The collision between AEM and JQF was the first mid-air collision of 2 IFR aircraft in Australia. In supporting the investigation, the ATSB sought to better understand the potential for visual acquisition of each aircraft considering the:
- information that was available to the pilots
- structure, performance and systems of each aircraft
- human performance limitations
- environmental conditions at the time.
The ATSB also reviewed other technologies that, if available, may have provided additional information to the pilots and enhanced their mental model of the surrounding airspace and traffic.
To do this the ATSB:
- undertook a literature review of human factors and the involved technological elements
- reviewed and conducted significant analysis on ADS-B data from the Airservices Australia receiver network
- reviewed aircraft structural, equipage and wreckage information, air traffic control recordings and personnel information.
The ATSB then developed exemplar cockpit displays using RTCA DO-317B‑compliant CDTI displays and analysed their likely effectiveness in alerting the pilots to the impending collision had they been fitted.
Key conclusions
- Analysis of the ADS-B data and on-site wreckage examination identified that the aircraft collided approximately 2,645 meters east and 6,820 meters south of the runway 05 threshold at Mangalore Airport with a relative angle of approximately 140° and at an altitude of approximately 4,125 ft, with JQF colliding with the top of AEM.
- Meteorological information indicated that cloud likely obscured the aircraft up until the collision, or until immediately before the collision, meaning that the pilots had insufficient time to visually acquire the opposing aircraft before the collision.
- Based on analysis of the flight paths, regardless of cloud conditions and aircraft structural considerations, the size, closing speed and contrast meant it was unlikely that the pilots would have been able to visually locate the target aircraft, determine it was a threat and initiate a manoeuvre in sufficient time to avoid the collision.
- Based on the ATSB’s optimised pilot eye positions, the pilots of JQF would likely have had the aircraft structure obscuring the target aircraft at critical times as AEM approached. This would have limited visual acquisition opportunity to either earlier times when the aircraft was smaller in the visual field or later when there was insufficient time to initiate and complete an avoiding manoeuvre.
- Based on the optimised eye positions, the viewpoints of the pilots in AEM were not obstructed by cockpit structure in the 260 seconds leading up to the collision.
- Sensitivity analysis of pilot eye position indicated that relatively small movements had a significant effect on aircraft structural obscuration of the target aircraft and where in the visual field the aircraft appeared.
- The 60,000 candle power landing light fitted to JQF provided the best opportunity for visual acquisition of the aircraft. Despite its position set back in the nose cowl limiting its effective arc there were multiple windows during which it could have been visible to the pilots of AEM and at its rated power it could draw the pilot’s attention even without a strobe functionality.
- Neither aircraft was fitted with an internal alerting capability. While one of the pilots of AEM had an electronic flight bag application available, it was not paired with an ADS-B IN device. This limited the traffic information that was available to the pilot and the version of the application which was used did not have an alerting function for nearby traffic.
- The pilots of both aircraft were reliant on external alerting, such as radio communications, to provide traffic information on aircraft that could not be visually acquired to develop their mental model of the operating environment.
- Utilising ADS-B IN enables pilots to accurately locate other aircraft without the need for an external alert and at significantly greater distances than are possible with the human eye. In this case, the presence of ADS-B IN equipment, combined with a suitable cockpit display would have provided accurate speed and position information on the aircraft well before it was detectable visually, while also aiding the sighting of an approaching aircraft.
- The animation developed by the ATSB using Flight Simulator X and FS Recorder clearly illustrates the limitations of visual acquisition and the significant additional alerting time provided by ADS-B IN displays.
References
Aerion. (2021). It’s Just ADS-B. Retrieved from Aerion: https://aireon.com/resources/overview-materials/its-just-ads-b/
Aerion. (2021). Technical Specifications. Retrieved from Aerion
AeroLEDS. (2021). SUNSPOT 36-4000 TECHNICAL SPECIFICATIONS. Retrieved from AeroLEDS: https://aeroleds.com/products/sunspot-36-4000-landing-light/
AeroLEDS. (2021). The LED Advantage. Retrieved from AeroLEDS: https://aeroleds.com/the-led-advantage/
Airservices Australia. (2016, December). ADS-B - Questions and Answers for Owners of General Aviation Aircraft. Retrieved from Airservices Australia: https://www.airservicesaustralia.com/wp-content/uploads/FAQ_ADS-B_DEC16.pdf
Airservices Australia. (2020, May). ADS-B coverage. Retrieved from Airservices Australia: https://www.airservicesaustralia.com/about-us/projects/ads-b/ads-b-coverage/
ATSB. (2002). AVIATION SAFETY INVESTIGATION REPORT 200201846 - Piper PA-28-161, VH-IBK, Socata TB-9, VH-JTV, Bankstown Airport, NSW, 5 May 2002. Canberra: ATSB.
Bullough, J. D. (2011). Aviation Signal Lighting: Impacts of Lighting Charactaristics on Visibility. Advances in Applied Science Research, 16-26.
CASA. (2019). Airspace Review of Hobart - December 2019. Canberra: CASA.
CASA. (2020). Civil Aviation Order 20.18 (Aircraft equipment — basic operational requirements) . Canberra: CASA.
Civil Aviation Safety Authority. (2021, July). VFR Equipment Survey Results. Retrieved from Civil Aviation Safety Authority: https://consultation.casa.gov.au/stakeholder-engagement-group/vfr-equipment/results/vfr_equipment_survey_summary.pdf
Colvin, K., Dodhia, R., & Dismukes, R. K. (2005). Is Pilots Scanning Adequate to Avoid Mid-Air Collisions? International Symposium on Aviation Psychology, (pp. 141-146). Dayton.
Device Technologies Inc. (2019, May 3). Extending Your Squitter – A Key Part of ADS-B. Retrieved from Device Technologies, Inc.: https://www.devicetech.com/aerospace/extending-your-adsb-squitter/
FAA. (2011). Introduction to TCAS II Version 7.1. Washington D.C.: U.S. Department of Transportation - Federal Aviation Administration.
FAA. (2017). Scanning for Other Aircraft. In FAA, Aeronautical Information Manual (pp. 8-1-7). Washington DC: Department of Transportation.
FAA. (2017). Section 5. Surveillance Systems. In FAA, Aeronautical Information Manual (pp. 4-5-1 - 4-5-21). Washington DC: FAA. Retrieved from FAA.
FAA. (2020). Night Operations - Aircraft Lighting and Equipment. In FAA, FAA Airplane Flying Handbook (pp. 10-5). Washington DC: US Department of Tranportation.
Federal Aviation Administration. (2016). Pilots' Role in Collision Avoidance. Advisory Circular 90-48D.
Francis, R., Vincent, R., Noel, J.-M., Tremblay, P., Desjardins, D., Cushley, A., & Wallace, M. (2011). The Flying Laboratory for the Observation of ADS-B Signals. International Journal of Navigation and Observation, 1-5.
Garmin Aviation. (2021). Garmin Aviation - ADS-B academy. Retrieved from Garmin: https://www.garmin.com/en-AU/aviation/adsb-FAQ/
Gibb, R., Gray, R., & Scharff, L. (2010). Aviation Visual Perception. Surrey: Ashgate Publishing Limited.
Hestnes, I. (2011, March). Visual system tutorial - Flightdeck737. Retrieved from ivarhestnes.com: https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd=&cad=rja&uact=8&ved=2ahUKEwjc3MWItLLzAhXLX30KHVF-D5EQFnoECAkQAQ&url=https%3A%2F%2Fwww.flightdeck737.be%2Fwp-c…
Hobbs, A. (2004). Limitiations of the See-and-Avoid Principle. Canberra: Australian Transport Safety Bureau.
Morris, C. (2005). Midair collisions: Limitations of the see-and-avoid concept in civil aviation. Aviation Space and Environmental Medicine, 357-365.
NTSB. (1988). AIRCRAFT ACCIDENT REPORT - Midair Collision of Skywest airlines Swearingen Metro II, N163SW, and Mooney M20, N6485U, Kearns, Utah, January 15, 1987. Washington DC: NTSB.
O’Callaghan, J. (2020). Aircraft Performance & Cockpit Visibility Study. Washington DC: NTSB.
OzRunways. (2022, 4 25). SkyEcho Portable VFR ADS-B IN and OUT. Retrieved from OzRunways
uAvionics. (2022, 4 25). SkyEcho Electronic Conspicuity - Tech Specs. Retrieved from uAvionics: https://uavionix.com/products/skyecho/#specs
US DOE. (2022, March 25). LED Lighting. Retrieved from United States Department of Energy - Energy Saver: https://www.energy.gov/energysaver/led-lighting
Sources and submissions
Sources of Information
The sources of information during the investigation included:
- ATSB investigation AO-2020-012
- ATSB investigation report AO-2020-051
- ATSB investigation report 200201846
- United States National Transportation Safety Board
- Civil Aviation Safety Authority
- Airservices Australia
- United States Federal Aviation Administration
- United States Department of Energy
- operators of VH-AEM and VH-JQF
- manufacturers of VH-AEM and VH-JQF
- aircraft and maintenance documentation from VH-AEM and VH-JQF
- operators of VH-NLO and VH-IJM
- RTCA (formerly Radio Technical Commission for Aeronautics)
- Recorded Raw and filtered ADS-B data as provided by Airservices Australia
- Bureau of Meteorology
- National Oceanic and Atmospheric Administration of the United States
- Microsoft Flight Simulator X and supporting documentation
- FS Recorder and supporting documentation
Submissions
Under section 26 of the Transport Safety Investigation Act 2003, the ATSB may provide a draft report, on a confidential basis, to any person whom the ATSB considers appropriate. That section allows a person receiving a draft report to make submissions to the ATSB about the draft report.
A draft of this report was provided to the following parties:
- Airservices Australia
- Civil Aviation Safety Authority
- United States National Transportation Safety Board
Submissions were received from
- Airservices Australia
- Civil Aviation Safety Authority
- United States National Transportation Safety Board
The submissions were reviewed and, where considered appropriate, the text of the report was amended accordingly.
Attachment A
Attachment A - Extremities of pilot’s eye position
This attachment contains imagery showing the cockpit views for the extremities of each pilot’s eye position as developed for the Refining the pilot’s eye position section. The images show the right, left, upper, lower, forward, and rearward extremities considered when refining the eye position
- Figures 1 to 6 show the extremities for AEM’s left seat pilot
- Figures 7 to 12 show the extremities for AEM’s right seat pilot
- Figures 13 to 18 show the extremities for JQF’s left seat pilot
- Figures 19 to 24 show the extremities for JQF’s right seat pilot
All images developed by the ATSB.
Figure 1 AEM left seat pilot - right extremity

Figure 2 AEM left seat pilot - left extremity

Figure 3 AEM left seat pilot - upper extremity

Figure 4 AEM left seat pilot - lower extremity

Figure 5 AEM left seat pilot - forward extremity

Figure 6 AEM left seat pilot - rearward extremity

Figure 7 AEM right seat pilot - right extremity

Figure 8 AEM right seat pilot - left extremity

Figure 9 AEM right seat pilot - upper extremity

Figure 10 AEM right seat pilot - lower extremity

Figure 11 AEM right seat pilot - forward extremity

Figure 12 AEM right seat pilot - rearward extremity

Figure 13 JQF left seat pilot - right extremity

Figure 14 JQF left seat pilot - left extremity

Figure 15 JQF left seat pilot - upper extremity

Figure 16 JQF left seat pilot - lower extremity

Figure 17 JQF left seat pilot - forward extremity

Figure 18 JQF left seat pilot - rearward extremity

Figure 19 JQF right seat pilot - right extremity

Figure 20 JQF right seat pilot - left extremity

Figure 21 JQF right seat pilot – upper extremity

Figure 22 JQF right seat pilot - lower extremity

Figure 23 JQF right seat pilot - forward extremity

Figure 24 JQF right seat pilot - rearward extremity

Attachment B
This attachment contains imagery that is the equivalent of figures 121 – 148 of the report with the simulated weather conditions altered to show a ‘sky clear’ day. As per the images in the report they show the main view from each pilot’s eye position at key moments in the sequence, including the CDTI displays and cockpit masks of the areas that would have been shielded.
- Images A through N show the view from AEM 42, 30, 24, 13, 10, 5 and 1 second before the collision.
- Images O through AB show the view from JQF 42, 32, 26, 13, 10, 5 and 1 second before the collision.
These images were used for a comparison with those in the report considering the visibility of the target aircraft but also as confirmation of the location of the aircraft against topography or the sky for aircraft contrast considerations.
Image A: View from AEM left seat pilot (LSP) when JQF transitions to proximal traffic on CDTI display

Source: ATSB
Image B: View from AEM right seat pilot (RSP) when JQF transitions to Proximal Traffic on CDTI display

Source: ATSB
Image C: View from AEM LSP when JQF triggered PAZ breach and ATAS alert

Source: ATSB
Image D: View from AEM RSP when JQF triggered PAZ breach and ATAS alert

Source: ATSB
Image E: View from AEM LSP when JQF triggered CAZ breach and ATAS alert

Source: ATSB
Image F: View from AEM RSP when JQF triggered CAZ breach and ATAS alert

Source: ATSB
Image G: View from AEM LSP 13 seconds before the collision

Source: ATSB
Image H: View from AEM RSP 13 seconds before the collision

Source: ATSB
Image I: View from AEM LSP 10 seconds before the collision

Source: ATSB
Image J: View from AEM RSP 10 seconds before the collision

Source: ATSB
Image K: View from AEM LSP 5 seconds before the collision

Source: ATSB
Image L: View from AEM RSP 5 seconds before the collision

Source: ATSB
Image M: View from AEM LSP 1 second before the collision

Source: ATSB
Image N: View from AEM RSP 1 second before the collision

Source: ATSB
Image O: View from JQF LSP when AEM transitions to Proximal Traffic on CDTI display

Source: ATSB
Image P: View from JQF RSP when AEM transitions to Proximal Traffic on CDTI display

Source: ATSB
Image P: View from JQF RSP when AEM transitions to Proximal Traffic on CDTI display

Source: ATSB
Image Q: View from JQF LSP when AEM triggers PAZ breach and ATAS alert
Source: ATSB
Image R: View from JQF RSP when AEM triggers PAZ breach and ATAS alert

Source: ATSB
Image S: View from JQF LSP when AEM triggers CAZ breach and ATAS alert

Source: ATSB
Image T: View from JQF RSP when AEM triggers CAZ breach and ATAS alert

Source: ATSB
Image U: View from JQF LSP 13 seconds before the collision

Source: ATSB
Image V: View from JQF RSP 13 seconds before the collision

Source: ATSB
Image W: View from JQF LSP 10 seconds before the collision

Source: ATSB
Image X: View from JQF RSP 10 seconds before the collision
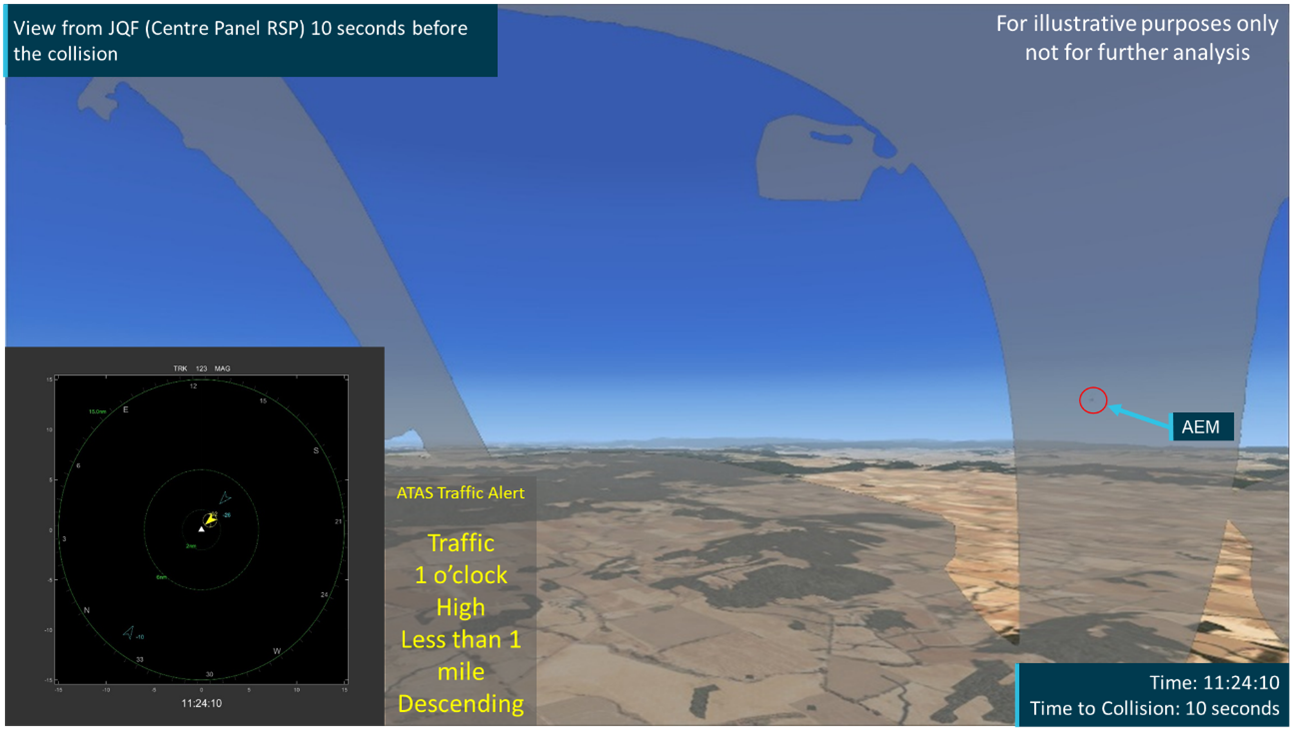
Source: ATSB
Image Y: View from JQF LSP 5 seconds before the collision

Source: ATSB
Image Z: View from JQF RSP 5 seconds before the collision

Source: ATSB
Image AA: View from JQF LSP 1 second before the collision

Source: ATSB
Image AB: View from JQF RSP 1 second before the collision

Source: ATSB
Glossary
| Abbreviation | Expanded Form | Definition (Where applicable) |
|---|---|---|
| AC | Advisory Circular | In Australia – documents that provide advice and guidance to explain particular regulatory requirements of the Civil Aviation Safety Regulations 1998 (CASR) or associated Manual of Standards (MOS). In the United States – documents to provide guidance for compliance with airworthiness regulations, pilot certification, operational standards, training standards, and any other rules within the 14 CFR Aeronautics and Space Title. |
| ACAS | Airborne Collision Avoidance System | A system that operates independently of ground-based equipment and air traffic control in warning pilots of the presence of other aircraft that may present a threat of collision. |
| ADS-B | Automatic Dependent Surveillance - Broadcast | a means by which aircraft, aerodrome vehicles and other objects can automatically transmit or receive data such as identification, position, and additional data, as appropriate, in a broadcast mode via data link. (AIP GEN 2.2 Definition) |
| ADS-B IN | A system in an aircraft, ground vehicle or other object designed to receive, and process ADS-B signals transmitted by other equipped vehicles. Usually used in conjunction with a CDTI and/or ATAS system | |
| ADS-B OUT | A system in an aircraft, ground vehicle or other object that transmits ADS-B Information | |
| ADS-R | Automatic Dependent Surveillance - Rebroadcast | System in the United States that retransmits ADS-B messages from aircraft to those operating a different type of ADS-B transceiver (Universal Access Transceiver). Not currently utilised in Australia |
| EDT | Eastern Daylight‑Saving Time | Timezone of the occurrence (UTC +11hrs) |
| AEM | Travel Air D95A VH-AEM | Accident Aircraft |
| Airservices | Airservices Australia | Australia’s Air Navigation Service Provider |
| ANSP | Air Navigation Service Provider | Organisations that manages air traffic or provides services within a particular area or region. |
| ATAS | ADS-B Traffic Alerting System | ACAS System that uses ADS-B in messages transmitted by other aircraft to provide alerts to pilots about traffic that is a collision risk. |
| ATC | Air Traffic Control | Organisation that provides air traffic management/ monitoring within a particular area or zone |
| AWIS | Aerodrome Weather Information Service | The AWIS provides actual weather conditions, via telephone or radio broadcast, from Bureau of Meteorology (BoM) automatic weather stations, or weather stations approved for that purpose by the BoM. |
| Az | Azimuth Angle | |
| BOM | Bureau of Meteorology | Australia's Aviation Meteorology Provider |
| CASA | Civil Aviation Safety Authority | Australia's Aviation Regulator |
| CDTI | Cockpit Display of Traffic Information | Display in aircraft cockpit that allows for the display of received ADS-B information. Also displays alerts attached to the ATAS. |
| CTAF | Common Traffic Advisory Frequency | A designated frequency on which pilots make positional broadcasts when operating in the vicinity of a non-controlled aerodrome or within a Broadcast Area (AIP Gen 2.2 Definitions) |
| EC | Electronic Conspicuity Device | a device that transmits Automatic Dependent Surveillance-Broadcast information about the position of an aircraft to other airspace users operating similar equipment. |
| EFB | Electronic Flight Bag Application | Electronic flight bags applications can electronically store and retrieve documents required for flight operations on a digital device, such as maps, charts, the Flight Crew Operations Manual, Minimum Equipment Lists and other control documents. |
| El | Elevation Angle | |
| ERSA | En-route Supplement Australia | Part of the Airservices Australia Aeronautical Information Service suite of documents. |
| Euler Angle | Angles describing the rotation of a body in 3 dimensional space. For aircraft this is pitch, roll and yaw. | |
| FAA | Federal Aviation Administration of the United States | |
| ft | feet | measure of altitude |
| GNSS | Global Navigation Satellite System | Generic term for any satellite constellation that provides location, altitude or speed information to a receiver on the ground. The Global Positioning System (GPS) is an example. |
| GPWT | Grid Point Wind and Temperature Forecast | BOM issued forecast providing a text-based display of forecast wind speed and direction and temperature forecasts at specified heights above mean sea level, presented in a gridded format. |
| IFR | Instrument Flight Rules | a set of regulations that permit a pilot to operate an aircraft in instrument meteorological conditions (IMC), which have much lower weather minimums than visual flight rules (VFR). Procedures and training are significantly more complex as a pilot must demonstrate competency in IMC conditions while controlling the aircraft solely by reference to instruments. IFR-capable aircraft have greater equipment and maintenance requirements. |
| IJM | Travel Air E95 VH-IJM | exemplar aircraft for VH-AEM |
| JQF | Piper PA-44-180 Seminole VH-JQF | accident aircraft |
| kt | knots | measure of speed in nautical miles per hour |
| LED | Light Emitting Diode | |
| LSP | Left Seat Pilot | |
| METAR | Aerodrome Meteorological Report | a routine report of meteorological conditions at an aerodrome. |
| NLO | Piper PA-44-180 Seminole VH-NLO | Exemplar aircraft for VH-JQF |
| NM | Nautical Miles | measure of distance |
| NTSB | United States National Transportation Safety Board | Transportation safety investigation agency of the United States |
| RA | Resolution Advisory | Alert provided by the TCAS system if an approaching aircraft breaches a defined area around the host aircraft and poses a collision risk. Alert provides crew with instructions as to appropriate manoeuvring to avoid a collision. |
| RSP | Right Seat Pilot | |
| RTCA | Formerly Radio Technical Commission for Aeronautics | Standards development organisation for various aviation electronics and components |
| STC | Supplemental Type Certificate | a type certificate (TC) issued when an applicant has received regulatory approval to modify an aeronautical product from its original design. |
| STCA | Short Term Conflict Alert | a system intended to assist the controller in preventing a collision between aircraft by generating, in a timely manner, an alert of a potential or actual infringement of separation minima. |
| TA | Traffic Alert | Alert provided by a TCAS system if another aircraft breaches a defined area around the host aircraft. Enunciated as ’traffic, traffic’. |
| TC | Type Certificate | A regulators approval of the airworthiness of a particular aircraft or component design. |
| TCAS | Traffic Collision Avoidance System | a type of airborne collision avoidance system (ACAS) |
| TIS-B | Traffic Information Service - Broadcast | System whereby position and altitude information from transponder equipped aircraft is retransmitted for reception by ADS-B In equipped aircraft. |
| UAT | Universal Access Transceiver | ADS-B device in the United States used for transmission and reception of ADS-B and associated messages on the 978MHz frequency. |
| UTC | Universal Co-ordinated Time | Global Aviation time standard based on the time around 0° longitude. |
| VFR | Visual Flight Rules | a set of regulations that permit a pilot to operate an aircraft in visual meteorological conditions. |
Purpose of safety investigationsThe objective of a safety investigation is to enhance transport safety. This is done through:
It is not a function of the ATSB to apportion blame or provide a means for determining liability. At the same time, an investigation report must include factual material of sufficient weight to support the analysis and findings. At all times the ATSB endeavours to balance the use of material that could imply adverse comment with the need to properly explain what happened, and why, in a fair and unbiased manner. The ATSB does not investigate for the purpose of taking administrative, regulatory or criminal action. TerminologyAn explanation of terminology used in ATSB investigation reports is available here. This includes terms such as occurrence, contributing factor, other factor that increased risk, and safety issue. Publishing informationReleased in accordance with section 25 of the Transport Safety Investigation Act 2003 Published by: Australian Transport Safety Bureau © Commonwealth of Australia 2022
Ownership of intellectual property rights in this publication Unless otherwise noted, copyright (and any other intellectual property rights, if any) in this report publication is owned by the Commonwealth of Australia. Creative Commons licence With the exception of the Coat of Arms, ATSB logo, and photos and graphics in which a third party holds copyright, this publication is licensed under a Creative Commons Attribution 3.0 Australia licence. Creative Commons Attribution 3.0 Australia Licence is a standard form licence agreement that allows you to copy, distribute, transmit and adapt this publication provided that you attribute the work. The ATSB’s preference is that you attribute this publication (and any material sourced from it) using the following wording: Source: Australian Transport Safety Bureau Copyright in material obtained from other agencies, private individuals or organisations, belongs to those agencies, individuals or organisations. Where you wish to use their material, you will need to contact them directly. |
- Euler angle: Angles describing the rotation of a body in three-dimensional space
- Times depicted are in EDT and altitudes in feet above mean sea level (AMSL)
- STCA: Short Term Conflict Alert - a system intended to assist the air traffic controller in preventing a collision between aircraft by generating, in a timely manner, an alert of a potential or actual infringement of separation minima.
- The National Oceanic and Atmospheric Administration Solar position calculator is available online at - ESRL Global Monitoring Laboratory - Global Radiation and Aerosols (noaa.gov)
- Azimuth angle – Angular measurement horizontally from position directly ahead of the viewer through a full revolution (-180° through 180°). Angles to the right are positive and angles to the left are negative.
- Elevation angle – Angular measurement vertically from a point directly in front of the viewer to a point directly above or below them (-90° through 90°). Angles above the horizontal are positive and angles below are negative.
- Wingspans of accident aircraft - AEM 37.82 ft and JQF 38.5 ft
- An equirectangular image is where a 360-degree image is projected onto a flat 2D surface with equal azimuth and elevation angle.
- Visual Trap – When the viewers gaze becomes focussed on a particular object in the foreground of the field of view neglecting objects in the distance. For example, a pilot becoming focussed on a blemish on the windscreen rather than scanning the whole visual field for traffic.
- ARO Scene 2019 version was used for the merging the scan data and processing the models.
- A mathematical process that translates and rotates in 3 dimensions for conversion between co-ordinate systems.
- Global Navigation Satellite System (GNSS) is a constellation of satellites used for locating a receiver on the earth. The Global Positioning System (GPS) is one example.
- ICAO 24-bit address is a unique airframe code that is issued to an aircraft when it is registered.
- Airspace in Australia is separated into different classes that may be either controlled (Class A, Class C, Class D, Class E) or non-controlled (Class G). Different services are offered to aircraft that operate in these airspace classes, based on the flight rules the aircraft is operating under (see the section titled Airspace in the investigation report).
- The images showing ADS-B network coverage do not include the coverage patterns for the 7 TASWAM stations.
- While there have been attempts to harmonise the traffic functionality between application providers to assist pilots in traffic awareness they have, as of the time of publication, been unsuccessful.
- Clock co-ordinate: A method of communicating relative position using the numbers of an analogue clock face to identify relative position usually with the pilot’s aircraft at the central axis of the face.
- Geoscience Australia’s Geodetic calculators can be found at Geodetic Calculators (ga.gov.au).
- The threshold of runway 05 at Mangalore Airport is located at 36.893415o S, 145.173053o E which converts to 337211 m E, 5915392 m S (Zone 55) in rectangular cartesian co-ordinates.
- Extremities were considered as the furthest point on the grid in a specific direction where the eye position was still within the structure of the cockpit. In some cases, the movements of the eye position shifted the visual position outside the cockpit structure either into or through a door or the roof. In these cases, the next position closer to the initial estimate was considered as the extremity.
- A third STCA was received by the controller on JQF and VFR traffic in the circuit. This was determined to be a nuisance alert and not relevant..
- RTCA DO-317B was the standard that outlined the operational performance requirements of aircraft surveillance applications, including performance standards for ADS-B IN systems (including CDTI and ATAS).
- FS Recorder is a Freeware add-on to FSX developed by Matthias Neusinger for recording and replay of flights in FSX. It was previously available at http://www.fs-recorder.net/, however the website is no longer available.
- Piper Seminole Model was downloaded from Fly Away Simulation Piper PA-44-180 Seminole for FSX (flyawaysimulation.com)
- These values are for an FSX window with an aspect ratio of 1.78 (monitor resolution of 1920 x 1080 pixels), at a ’zoom’ setting of 0.3.
- for the online version of the report figures 123-136 have been replaced with video animation’s 1 and 2 showing the view from the right and left seats, respectively, of AEM in the final 260 seconds in the lead up to the collision. The time of the PAZ and CAZ breaches are annunciated in the video and the location of JQF 12 seconds before the collision is shown with a light blue circle. The still frame images as described above are in the PDF version of the report or by pausing the video.
- for the online version of the report figures 137-150 have been replaced with animation video’s 3 and 4 showing the view from the right and left seats, respectively, of JQF in the final 260 seconds in the lead up to the collision. The time of the PAZ and CAZ breaches are annunciated in the video and the location of AEM 12 seconds before the collision is shown with a light blue circle. The still frame images as described above are in the PDF version of the report or by pausing the video.