What happened
On 18 November 2017, the flight crew of a Boeing 777-319(ER) aircraft, registered ZK-OKN and operated by Air New Zealand, was conducting a scheduled passenger service from Auckland, New Zealand, to Brisbane, Queensland. The flight crew consisted of the aircraft captain, who was the pilot flying (PF), and the first officer, who was the pilot monitoring (PM).[1]
The flight crew commenced duty at 0525 Eastern Standard Time,[2] and the aircraft departed Auckland at 0630. As the aircraft approached descent into Brisbane, the flight crew copied the expected arrival procedures and weather conditions from the ATIS.[3] The ATIS, information ‘OSCAR’ (O), stated that arriving aircraft were to expect an instrument approach to runway 01,[4] and that the wind at the threshold of runway 01 was 180° at 5 kt, with a maximum tailwind of 5 kt. The flight crew programed and briefed for an expected SAVER1P standard arrival procedure with an RNAV-P (RNP) RWY 01 approach. The PF reported that, in response to the expected tailwind on final approach and landing, the approach briefing included the importance of ensuring that the aircraft did not get high during the descent and approach.
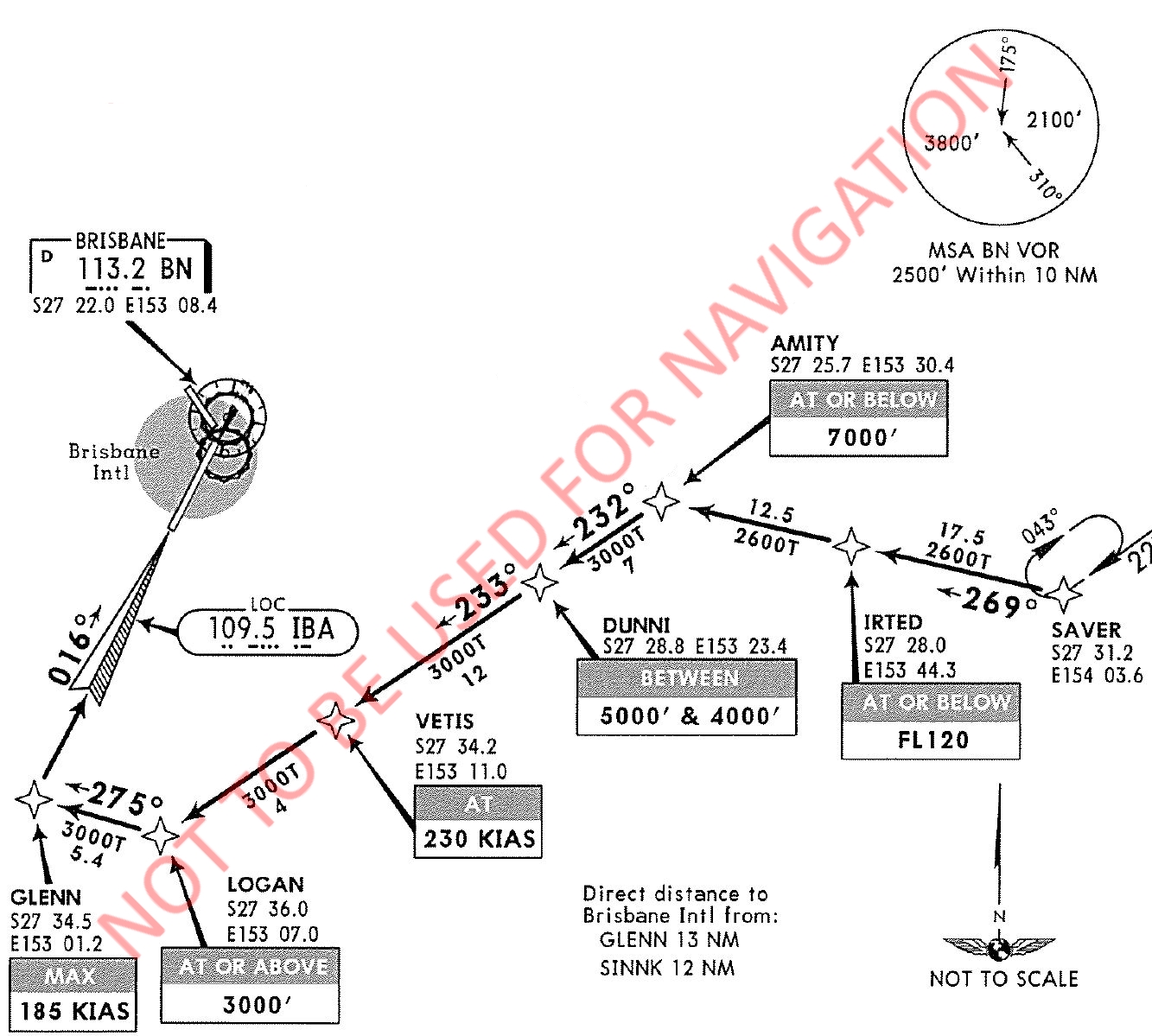
Prior to commencing the descent, the aircraft was cleared to conduct a SAVER1A standard arrival procedure for an ILS approach to runway 01 (Figure 1).The flight crew reprogrammed and re-briefed the arrival before commencing the descent.
Figure 1: An extract of the Jeppesen SAVER1A chart
The aircraft’s quick-access recorder (QAR)[5] provided information on the aircraft’s flight parameters, autoflight system altitude targets, and autoflight system modes. During the descent, the aircraft was being controlled by the PF through the use of an autopilot, with flight profile changes being achieved through selections on the mode control panel (MCP) (see Figure 2). Under normal procedures, the flight crew were required to verify autoflight system mode changes, such as those selected on the MCP, had been activated through the required mode being displayed on the flight mode annunciator (FMA). The FMA, located just above the primary flight display (see Figure 2), displayed the active flight modes for, from left to right, the autothrottle, roll and pitch.
Figure 2: Flight deck panels identifying the mode control panel with associated controls, and the primary flight display with the flight mode annunciator expanded.
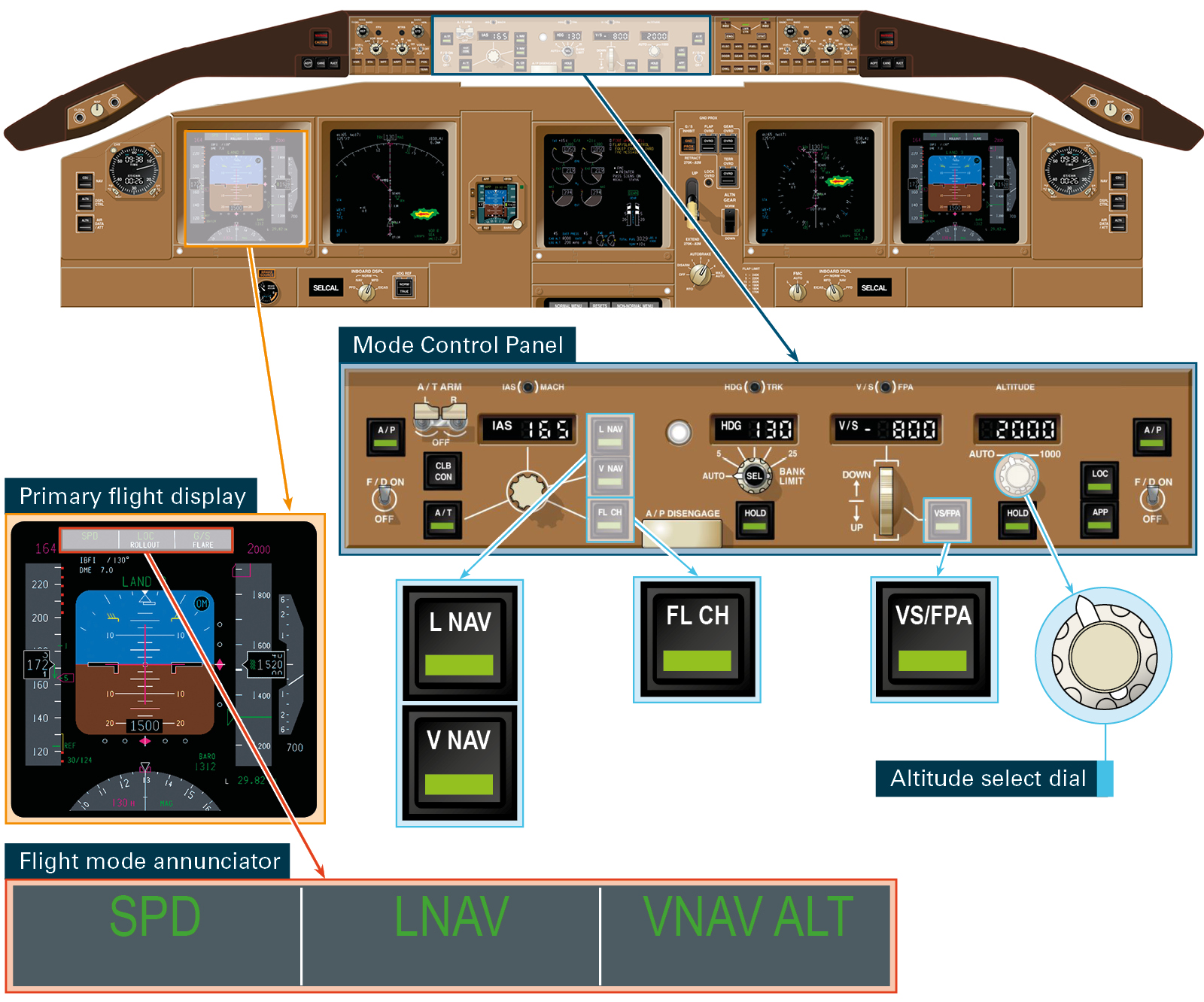
Source: Boeing, annotation by ATSB.
The aircraft commenced descent at 0856 with the autopilot selected on and the autoflight system being selected to the LNAV and VNAV modes.[6] Approaching DUNNI, at 0919 with a descent clearance limit of 5,000 ft, air traffic control (ATC) cleared the aircraft to continue the descent to 4,000 ft. In response, the PF set 4,000 on the MCP and the aircraft continued the descent while tracking towards VETIS. At about 0921:15, a change of controllers commenced at the ATC workstation. The handover to the new controller was completed at about 0922:30. During this period the aircraft was approaching VETIS, and the flight crew reported that they were keen for further descent, being mindful of the desire to ensure that the aircraft did not get high on the descent.
Shortly after passing VETIS, at 0922:45, and while maintaining 4,000 ft, ATC cleared the aircraft to descend to 3,000 ft and for the ILS runway 01. The PF selected 3,000 ft in the MCP altitude window (see Figure 3 at 0922:52) and pressed the altitude selector[7] to initiate further descent. The PF later observed that the altitude selector was probably not properly pressed. As a result, the expected flight mode change did not occur and the aircraft did not commence the descent as expected. The QAR data recorded the autoflight pitch remaining in the VNAV mode, however, the flight crew later reported that the VNAV mode changed from VNAV PTH to VNAV ALT. The PF reported that this pitch mode change was unexpected and unfamiliar. The flight crew operations manual stated the following with respect to the pitch mode entering VNAV ALT:
When a conflict occurs between the VNAV profile and the MCP altitude, the airplane levels and the pitch flight mode annunciation becomes VNAV ALT. The airplane maintains altitude. To continue the climb or descent, change the MCP altitude and push the altitude selector or change the pitch mode.
In response, and with the intent of ensuring that the aircraft did not get high on the desired descent profile, the PF selected the V/S[8] mode, and then the FLCH[9] mode, to initiate the descent. The aircraft commenced descending and at 0923:33 the autoflight system commenced reducing the rate of descent to capture the cleared altitude of 3,000 ft—indicated by the ALT[10] mode activating. Shortly after, and as the aircraft passed through LOGAN, the autoflight system transitioned back into the VNAV mode and then the ALT mode.
Figure 3: Flight data for the period 0922.45 (at about VETIS) to 0925.00 (just before GLENN).
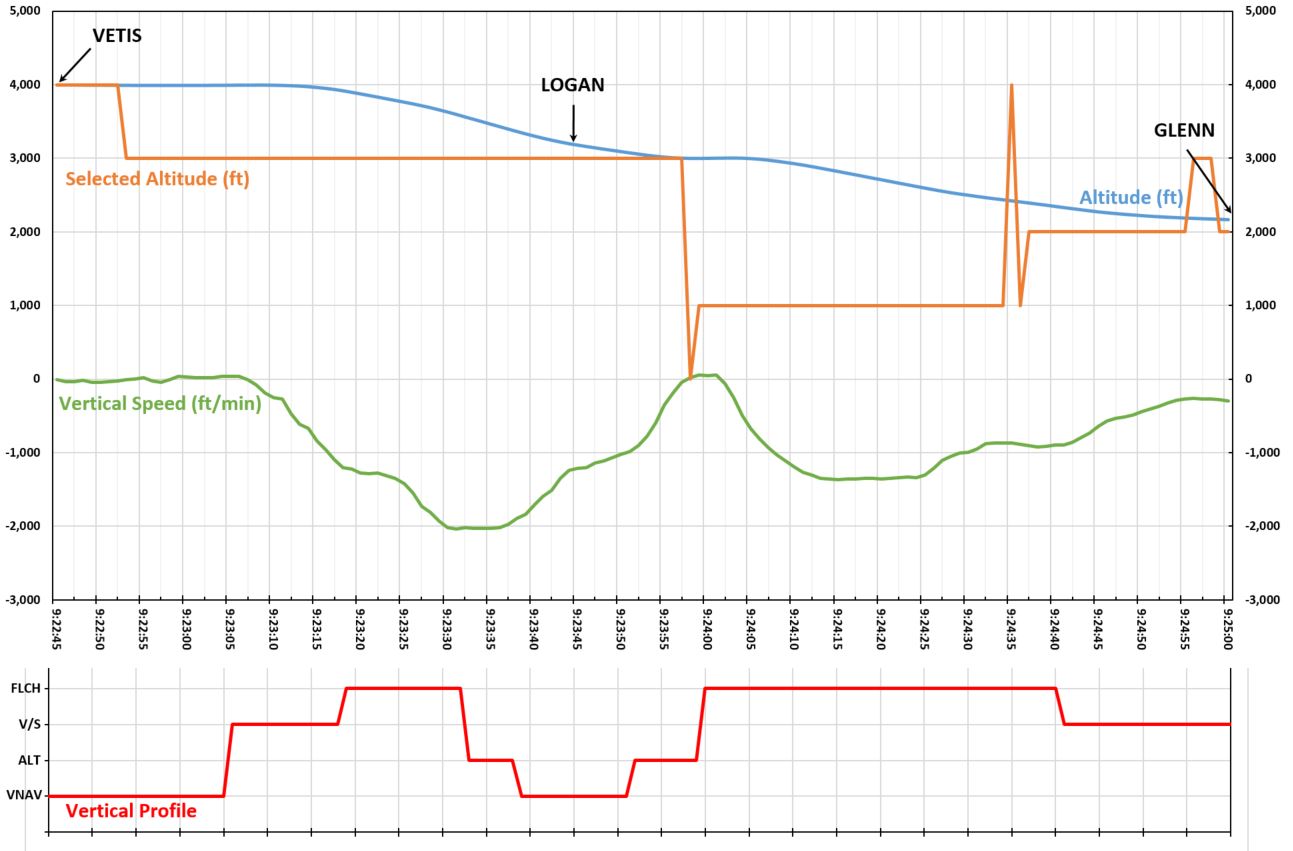
Source: ATSB
As the aircraft was turning towards GLENN, and maintaining the cleared altitude of 3,000 ft, the PF selected 1,000 ft in the MCP and then the FLCH mode with the intent of continuing the descent further. About 5 seconds later, at 0924:03, the aircraft commenced descent from 3,000 ft. At 0924:14, as the aircraft had passed 2,850 ft, ATC instructed the aircraft to maintain best speed, and at least 180 kt until 5 NM final. The PM acknowledged the instruction.
At 0924:35 the PF raised the MCP target altitude to 2,000 ft and changed the flight mode to V/S. At 0924:50, ATC alerted the aircraft that it was cleared to 3,000 ft and that it was descending through 2,200 ft, which was acknowledged. The aircraft levelled at about 2,000 ft and maintained that altitude until it intercepted the glideslope for the ILS. The aircraft landed at 0929 without further incident.
Pilot comments
The PF later reported that, as a result of not properly pressing the altitude select push button to commence the descent from 4,000 ft, the workload experienced increased significantly. This resulted in what the PF described as a loss of situational awareness. After being alerted by ATC that the aircraft was below the cleared altitude of 3,000 ft, and at that time having the runway in sight and being able to maintain visual conditions until landing, the PF decided to maintain 2,000 ft until the aircraft re-joined the approach profile to reduce the workload.
The PM reported that the PF’s actions in descending below the cleared level were not challenged, as this was the first time that the PM had flown this approach.
Operator’s comments
The crew underwent a training session in the B777 simulator to replicate the event and to identify how the error was able to manifest. The training also represented an opportunity to reinforce the use of the various modes for the approach phase.
The RNAV approaches are regularly treated as step down approaches by controllers. The RNAV approaches were designed to reduce pilot and controller workload, however, they regularly increase the pilot workload and increase the opportunity for crew errors. It is also not uncommon to be taken off an RNAV path, given radar vectors then put back on the RNAV at some point in the RNAV path sequence which also increases pilot workload.
Related occurrences
A number of ATSB investigations have examined occurrences that included altitude deviations in flight path involving foreign crew operating within Australia. Of these, two recent examples are summarised below. Full reports are available at the ATSB website.
ATSB investigation AO-2017-026
On the morning of 22 February 2017, a Singapore Airlines Boeing 777-212, from Singapore Changi Airport, Singapore, to Canberra Airport, Australian Capital Territory, was conducting a standard arrival into Canberra when it descended through an altitude constraint associated with the arrival procedure. The error was the result of FMC entry omissions and the flight crew not identifying the relevant altitude limitation.
ATSB investigation AO-2016-012
During a second approach into Perth Airport, Western Australia, an Airbus A320 aircraft operated by PT Indonesia AirAsia was conducting a VOR approach to runway 06 when the flight crew descended the aircraft earlier than normal, but believed that they were on the correct flight path profile. While descending, both flight crew became concerned that they could not visually identify the runway, and focused their attention outside the aircraft. At about that time, the approach controller received a ‘below minimum safe altitude’ warning for the aircraft. The controller alerted the crew of their low altitude and instructed them to conduct a go-around.
Safety analysis
The approach and landing are phases of flight known to have high workload. That workload can increase exponentially when errors and the unexpected occur. As a result of not pressing the altitude selector properly, and then checking that the required flight mode change occurred on the FMA, the PF’s workload increased substantially. This resulted in the PF losing awareness of the aircraft’s descent profile, and in particular the aircraft’s altitude versus the distance to landing, a component of what is commonly referred to as situational awareness. This loss of descent profile awareness, combined with a preconception that the aircraft should not get high on profile during the positioning for final approach, resulted in the PF initiating a descent below the altitude limit of 3,000 ft that was required to be maintained until the aircraft was established on final approach. The PF identified the error and began levelling the aircraft just before the flight crew were notified by ATC that the aircraft had breached the descent clearance limit.
The PM role requires an awareness of the PF actions as well as an awareness of the aircraft’s flight profile relative to the clearance limit and any limitations associated with the approach procedure. While the PM had not flown this approach before, the monitoring role during the approach was not effectively executed.
Findings
These findings should not be read as apportioning blame or liability to any particular organisation or individual.
- As a result of high workload, a loss of awareness of the aircraft’s descent profile, and a preconception with ensuring that the aircraft did not get high on the approach flight path, the flight crew initiated a descent below the cleared altitude of 3,000 ft as the aircraft was positioning for final approach. The flight crew corrected the error and levelled the aircraft at about 2,000 ft shortly before being alerted of the altitude breach by ATC.
Safety message

This investigation identifies how an error can increase workload, particularly during a phase of flight that has an already high workload. It also highlights the importance of confirming mode changes on the FMA. Handling of approaches to land continues to be a safety priority for the ATSB.
Purpose of safety investigationsThe objective of a safety investigation is to enhance transport safety. This is done through:
It is not a function of the ATSB to apportion blame or provide a means for determining liability. At the same time, an investigation report must include factual material of sufficient weight to support the analysis and findings. At all times the ATSB endeavours to balance the use of material that could imply adverse comment with the need to properly explain what happened, and why, in a fair and unbiased manner. The ATSB does not investigate for the purpose of taking administrative, regulatory or criminal action. TerminologyAn explanation of terminology used in ATSB investigation reports is available here. This includes terms such as occurrence, contributing factor, other factor that increased risk, and safety issue. Publishing informationReleased in accordance with section 25 of the Transport Safety Investigation Act 2003 Published by: Australian Transport Safety Bureau © Commonwealth of Australia 2018
Ownership of intellectual property rights in this publication Unless otherwise noted, copyright (and any other intellectual property rights, if any) in this report publication is owned by the Commonwealth of Australia. Creative Commons licence With the exception of the Coat of Arms, ATSB logo, and photos and graphics in which a third party holds copyright, this publication is licensed under a Creative Commons Attribution 3.0 Australia licence. Creative Commons Attribution 3.0 Australia Licence is a standard form licence agreement that allows you to copy, distribute, transmit and adapt this publication provided that you attribute the work. The ATSB’s preference is that you attribute this publication (and any material sourced from it) using the following wording: Source: Australian Transport Safety Bureau Copyright in material obtained from other agencies, private individuals or organisations, belongs to those agencies, individuals or organisations. Where you wish to use their material, you will need to contact them directly. |
__________
- Pilot Flying (PF) and Pilot Monitoring (PM): procedurally assigned roles with specifically assigned duties at specific stages of a flight. The PF does most of the flying, except in defined circumstances; such as planning for descent, approach and landing. The PM carries out support duties and monitors the PF’s actions and the aircraft’s flight path.
- Eastern Standard Time (EST): Coordinated Universal Time (UTC) + 10.0 hours.
- Automatic terminal information service, a continuous and repetitive broadcast that provides current, routine information to arriving and departing aircraft. That information normally includes current meteorological conditions at the airfield, as well as expected approach requirements.
- Runway number: the number represents the magnetic heading of the runway.
- A QAR is an airborne flight data recorder that provides quick and easy access to raw flight data. QARs provide a limited scope of flight data. The QAR data did not identify which autopilot was engaged, nor the specific component of VNAV that was the active mode.
- The lateral navigation (LNAV) and vertical navigation (VNAV) modes command the autoflight system to follow the flight management system generated optimum lateral and/or vertical navigation flight path. VNAV is a general descriptor for three sub-component modes, VNAV PTH, VNAV SPD and VNAV ALT. QAR pitch data only identified that VNAV was active, not the specific component.
- With the aircraft in level flight, in VNAV PTH or VNAV ALT pitch modes, and the selected altitude as displayed in the altitude window being below the current altitude, pushing the inner altitude selector will result in the aeroplane commencing a descent to the selected altitude.
- The vertical speed mode, an autoflight mode that enables the flight crew to command a desired rate of climb or descent from the autoflight system.
- Flight level change mode, an autoflight mode that enables the flight crew to command an immediate climb or descent to the target altitude as selected in the altitude window, without reference to any flight management system altitude or speed constraints.
- The altitude hold mode (ALT) is activated by either pushing the MCP altitude HOLD switch, or capturing the selected altitude from a V/S, FPA, or FLCH climb or descent.