What happened
On the evening of 19 February 2016, an Airbus A320 aircraft, registered PK-AXY and operated by PT Indonesia AirAsia was on a scheduled passenger service from Denpasar, Indonesia to Perth, Australia. During cruise, the captain’s flight management and guidance computer (FMGC1) failed. Due to the failure, the flight crew elected to use the first officer’s duplicate systems. For the aircraft’s arrival in Perth there was moderate to severe turbulence forecast below 3,000 ft with reports of windshear. The crew commenced an instrument landing system (ILS) approach to runway 21.
During the approach, the flight crew made a number of flight mode changes and autopilot selections, normal for an ILS approach with all aircraft operating systems available. However, some of those flight modes and autopilot selections relied on data from the failed FMGC1 and the autothrust system commanded increased engine thrust. The crew did not expect this engine response and elected to conduct a go-around. With an increasing crosswind on runway 21, the crew accepted a change of runway, to conduct a non-precision instrument approach to runway 06.
With the time available, the first officer programmed the new approach into his FMGC and conducted the approach briefing. During this period, the captain hand flew the aircraft and manually controlled the thrust. During the approach to runway 06, the crew descended the aircraft earlier than normal, but believed that they were on the correct flight path profile.
While descending, both flight crew became concerned that they could not visually identify the runway, and focused their attention outside the aircraft. At about that time, the approach controller received a “below minimum safe altitude” warning for the aircraft. The controller alerted the crew of their low altitude and instructed them to conduct a go-around. The crew then conducted another approach to runway 06 and landed.
What the ATSB found
The ATSB identified that the flight crew were unsuccessful in resolving the failure of the FMGC and had a limited understanding of how the failure affected the aircraft’s automation during the ILS approach. This resulted in the unexpected increase in engine thrust, which prompted a go-around.
The flight crew had a significant increase in workload due to the unresolved system failures, the conduct of a go-around and subsequent runway change. This, combined with the crew’s unfamiliarity and preparation for the runway 06 instrument approach, meant they did not effectively manage the descent during that approach.
The flight crew’s focus of attention outside the aircraft distracted them during a critical stage of flight. The crew did not detect that they had descended the aircraft below the specified segment minimum safe altitude.
The flight crew commenced their descent for the second runway 06 instrument approach later than normal, initially necessitating an increased rate of descent and at 300 ft the engine thrust reduced briefly to idle.
Safety message
Handling of approach to land is one of the ATSB’s SafetyWatch priorities. Unexpected events during the approach and landing can substantially increase what is often a high workload period. Adherence to standard operating procedures and correctly monitoring the aircraft and approach parameters provides assurance that the instrument approach can be safely completed. A go-around should be immediately carried out if the approach becomes unstable or the landing runway cannot be identified from the minimum descent altitude or missed approach point.
On the evening of 19 February 2016, an Airbus A320 aircraft, registered PK-AXY and operated by PT Indonesia AirAsia was on a scheduled passenger service from Denpasar, Indonesia to Perth, Australia. The aircraft was operated by two flight crew, four cabin crew and carried 96 passengers.
For the flight to Perth, the captain was the pilot flying (PF), with the first officer the pilot monitoring (PM).[1] A late requirement to change aircraft delayed the departure of the flight by 2 hours and the updated arrival time into Perth was estimated to be about 2130 Australian Western Standard Time.[2]
Departure and cruise
On departure from Denpasar Airport, the aircraft climbed to the cruise altitude of FL 370.[3] The flight proceeded normally until the aircraft was just over an hour from Perth when, at approximately 2024, the crew noticed that the captain’s multipurpose control and display unit (MCDU1)[4] had frozen and the captain’s navigation display (ND)[5] had the advisory message MAP NOT AVAIL. In addition, the first officer’s MCDU (MCDU2) displayed the message INDEPENDENT OPERATION, which indicated to the crew that the captain’s flight management and guidance computer (FMGC1)[6] had failed. Figure 1 depicts the location and interaction between the various equipment.
Figure 1: Schematic of A320 cockpit, depicting the location and interaction between various equipment
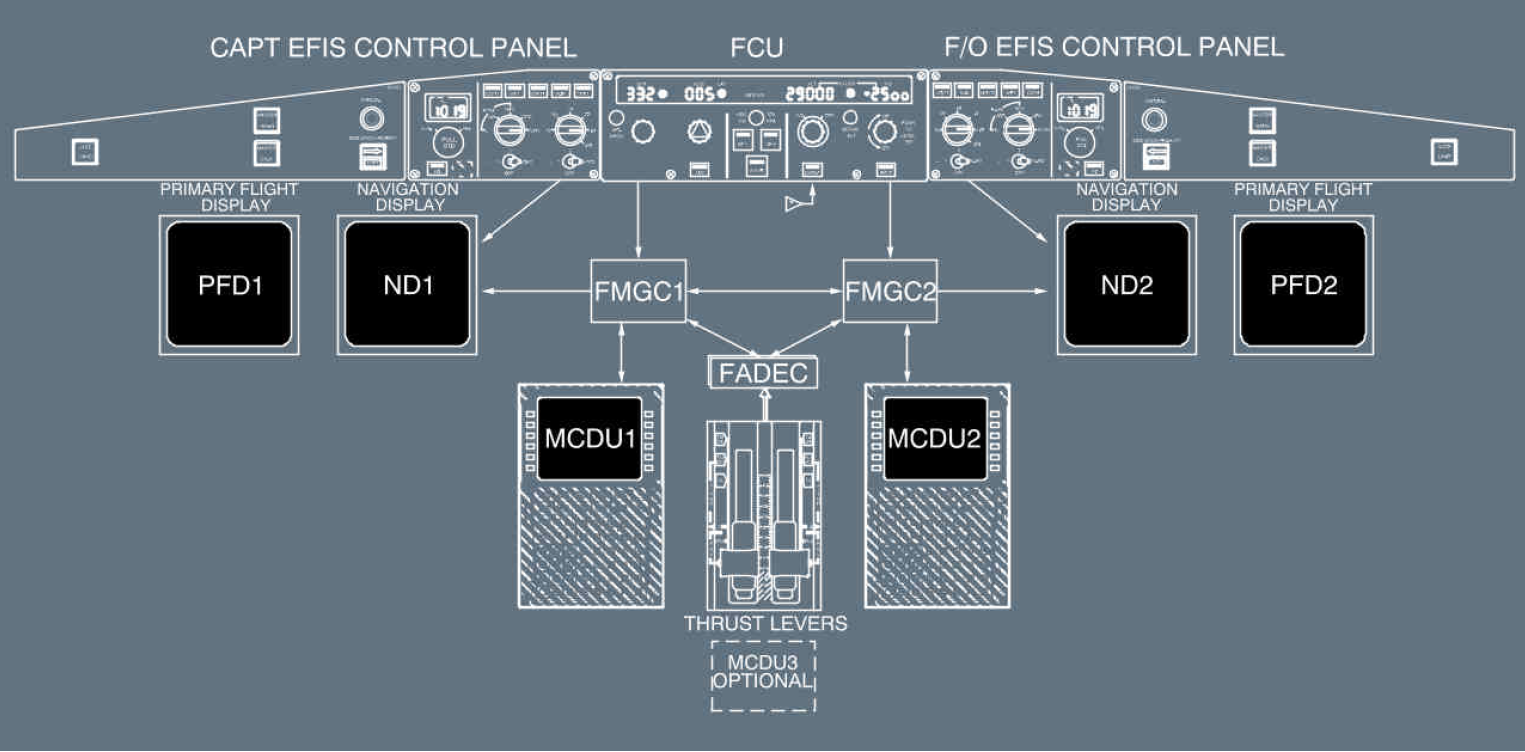
Source: Airbus Flight Crew Operating Manual
At the time of the FMGC1 failure, flight data indicated the aircraft was flying at a calibrated airspeed of 253 kt. A short time later, the captain recalled disengaging autopilot 1 (AP1)[7] and engaging autopilot 2 (AP2).
The flight crew reported that in an attempt to resolve the issues associated with the frozen MCDU1 screen and apparent FMGC1 failure, they referred to the Quick Reference Handbook (QRH) and the Flight Crew Operating Manual (FCOM) but they determined that there was no specific action for the failures. Instead, as the first officer’s FMGC (FMGC2) appeared to be operating normally, they decided to continue to Perth using his ND and MCDU, because these utilised the functioning FMGC. At 2040, about 15 minutes after the failure occurred, the crew climbed the aircraft to FL 380. The remaining 30 minutes of the cruise was uneventful.
Pre-descent planning and approach
Prior to the descent, the flight crew reviewed and briefed the approach altitude minima, planned arrival route, weather, go-around procedures, as well as conducting other normal pre-descent activities. For the aircraft’s arrival in Perth, moderate to severe turbulence was forecast below 3,000 ft, with visibility greater than 10 km and no significant cloud below 5,000 ft. As the crew had not identified any specific procedure for managing the FMGC failure, and the first officer’s duplicate systems appeared to be operating normally, his MCDU was used to program the arrival procedure and instrument landing system (ILS)[8] approach. The crew briefed that the first officer would take over as PF during the approach, as they believed it was better for the PF to have the functioning ND and MCDU.[9] The crew later reported that they did not identify or conduct further investigation to determine how the FMGC failure may affect continued flight operation or the conduct of the approach.
At about 2115, the flight crew commenced descent into Perth to conduct the JULIM 2A standard instrument arrival[10] and ILS approach to runway 21.[11] As the aircraft descended through 9,000 ft, the captain took over the role of PM while the first officer became PF.
The flight crew selected managed lateral and vertical descent modes[12] with AP2 selected. At about 2140 while descending through 5,000 ft, the crew received the first of three speed restrictions from air traffic control (ATC), which required a change from a managed speed mode to a selected speed mode,[13] to control the aircraft’s speed.
At about 2143, with the approach mode armed, the flight crew engaged AP1 and received a CAB PR LDG ELEV warning.[14] The warning was a result of engaging AP1 with an inoperative FMGC1.[15] This was because with both autopilots engaged, FMGC1 took precedence over FMGC2. The data programmed into FMGC1 at that time did not include the landing and approach data required for the aircraft’s flight management system to determine the cabin’s pressurisation schedule for the descent and landing. To resolve the cabin pressure warning, the crew set the cabin pressure to manual and continued the approach.
ILS approach to runway 21 and go-around
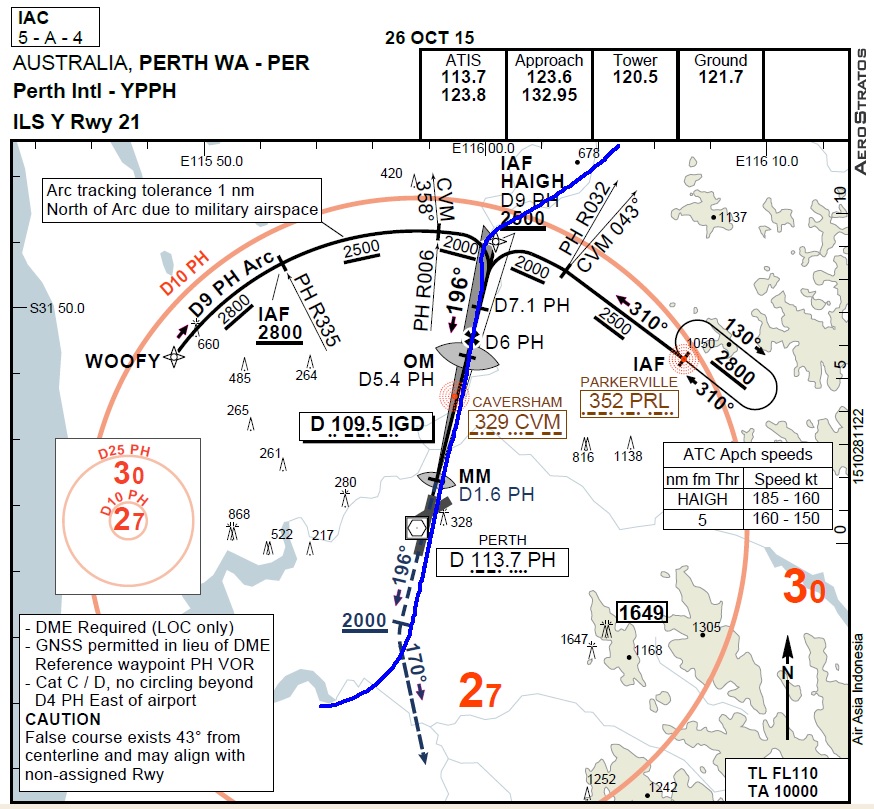
See Figure 2 for a profile view of the runway 21 ILS approach. At about 2144, the aircraft intercepted the localiser and the glideslope for the runway 21 ILS (Appendix A contains the aircraft track overlaid on the approach chart along with the flight data for the approach). At 2144:38, after reducing the aircraft’s selected speed to 160 kt and establishing the aircraft on the ILS, the selected altitude on the flight control unit (FCU)[16] was set to the go-around altitude, consistent with the operator’s standard operating procedure. A short time later, the flight crew elected to select a managed speed mode. This change resulted in the auto flight system attempting to capture the speed target contained in FMGC1 when it failed (which was 253 kt) and the autothrust system commanded an increase in engine thrust.
The flight crew recognised the increasing engine thrust and airspeed but they did not understand why it occurred. The captain told the first officer, ‘make a go-around’[17] and then advised ATC that they were conducting a go-around. From 2144:57, there was a period of 25 seconds where dual sidestick control inputs occurred. During this time, the autopilot automatically disengaged and the captain disconnected the autothrust system.[18] The recorded data indicated that neither the captain nor first officer pressed the priority takeover button[19] during this period. The captain recalled that at about 2,500 ft, at the flap 0 speed, he stated ‘okay, my control’ and took over as PF with the first officer taking the PM responsibilities. Recorded data indicates the captain had sole control of the aircraft at 2145:24, at an altitude of about 2,500 ft.
Figure 2: Profile view of the runway 21 ILS approach with aircraft flight profile (blue). The aircraft was on the ILS profile until the increase in engine thrust and go-around

Source: Naviga (modified by the ATSB)
After the go-around and vectoring for the runway 06 VOR approach
After taking control of the aircraft, the captain reconnected the autopilot and autothrust. The recorded flight data indicates that the AP1 was engaged for 12 seconds, with the autothrust engaged and active for 10 seconds. The captain then decided to disconnect the autothrust to manually fly the aircraft, due to his uncertainty over the thrust increase during the previous approach and failure of FMGC1. The recorded data indicates that when the autothrust was disconnected the thrust lever was below the climb detent. This positioning of the thrust lever meant that it was unlikely the flight crew received a thrust lock (further information is provided in the Autothrust system sub-section in the Context).
At 2146, the first officer requested ATC provide radar vectors for another ILS approach to runway 21. ATC provided radar vectoring and issued clearance for the approach. However, about 4 minutes later, ATC advised the flight crew that the crosswind for runway 21 had increased to 22 kt, with gusts to 25 kt. Due to the increased crosswind, ATC offered the crew the option of conducting a VHF Omni Directional Radio Range (VOR)[20] approach and landing on runway 06.[21] At 2152, after confirming the crew’s preference to land on runway 06, ATC vectored them to the final approach track to conduct the VOR approach.[22] The captain considered there was sufficient time to prepare for the approach, so did not perceive a need to enter a holding pattern to complete the briefing. At 2156, ATC informed the crew that a new ATIS was current and that there was moderate to severe turbulence below 3,000 ft.
The first officer later recalled programming FMGC2 for the VOR approach, and briefing the captain for the approach. The first officer also cross-referenced the information in the FMGC with his paper copy of the instrument approach chart. The captain stated that they conducted a short briefing instead of a full briefing because the situation was moving so quickly.
VOR approach to runway 06 and subsequent go-around
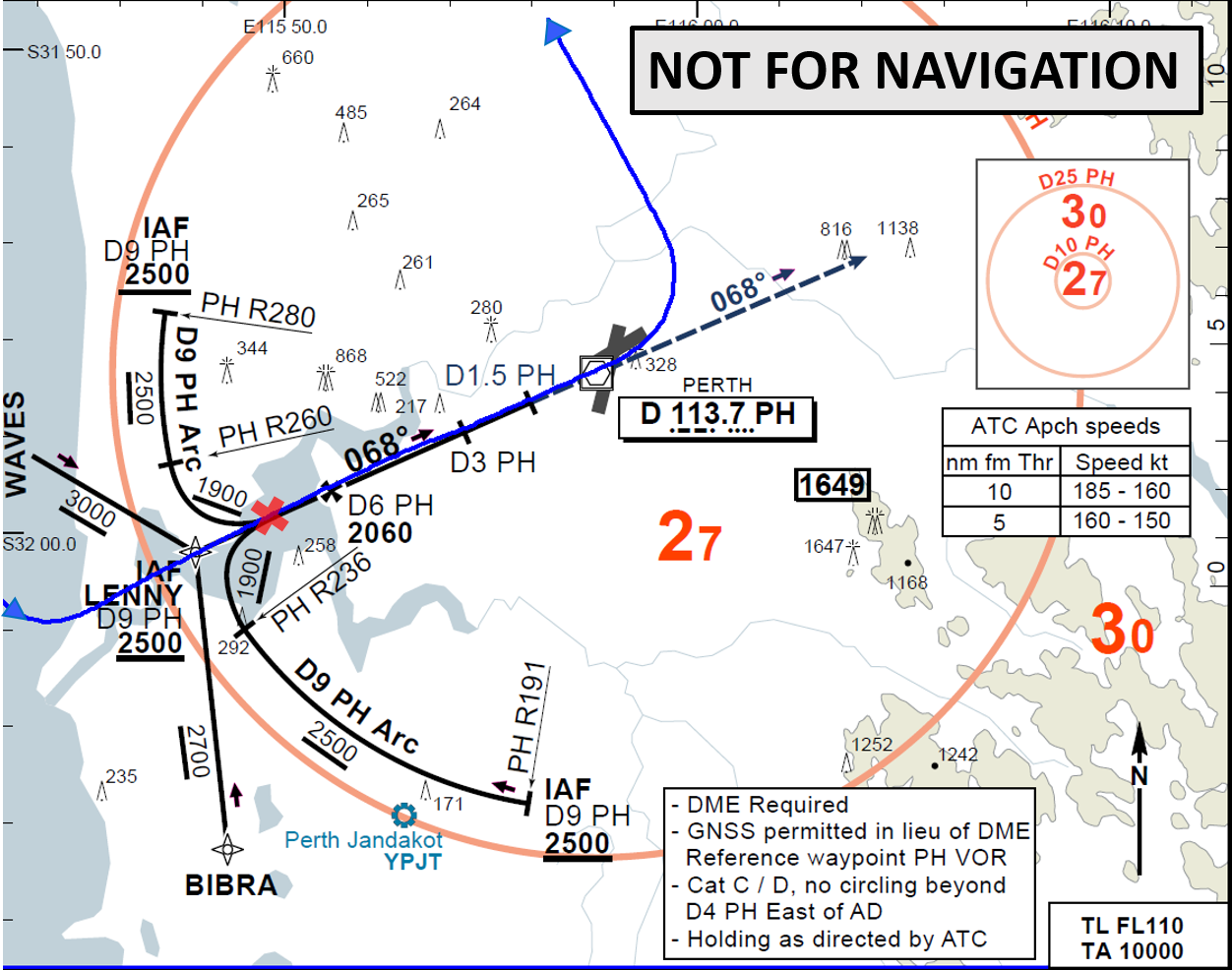
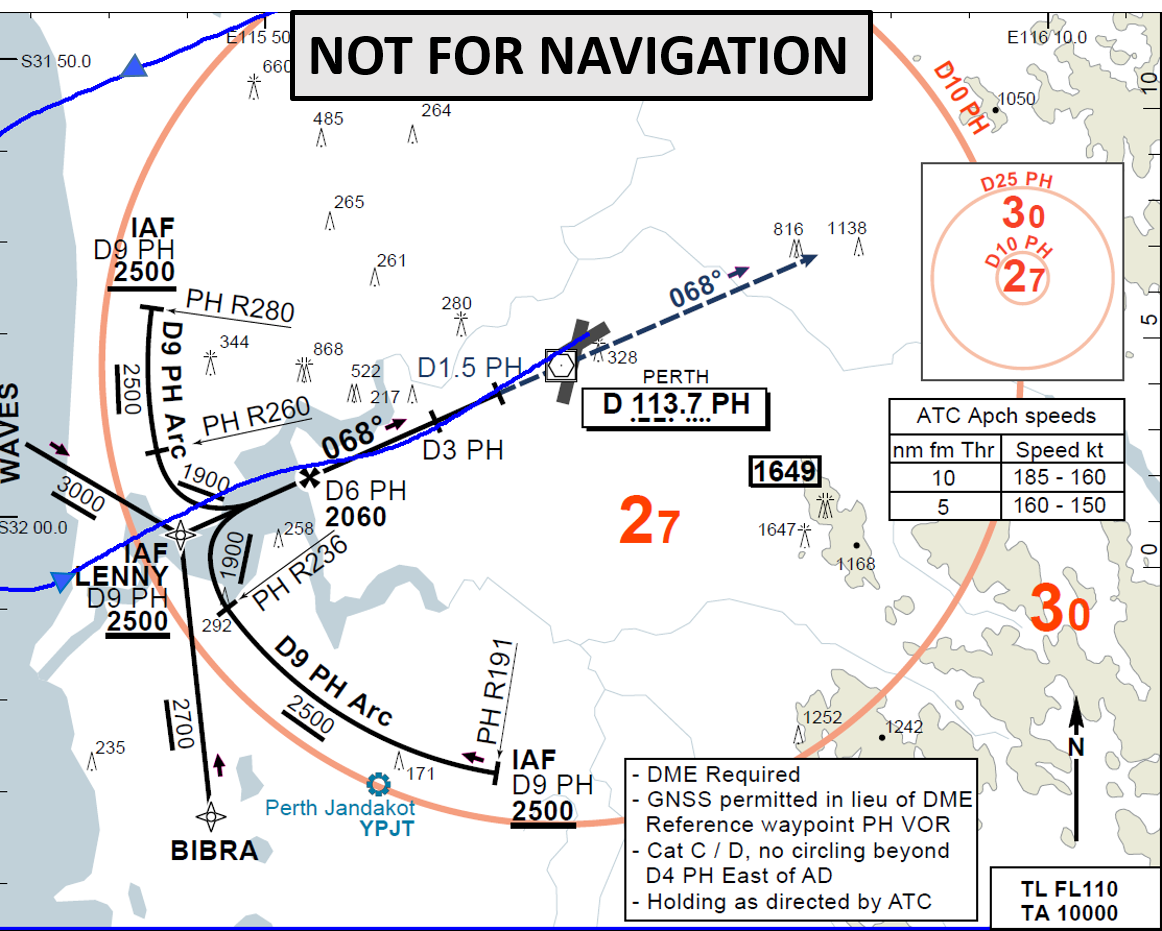
At 2200, ATC asked the flight crew twice if they were established on the 248 radial (which was the inbound track for the VOR procedure) and the first officer responded that they were 10 NM from the runway. ATC again asked the crew to confirm they were established, and the first officer replied stating, that they were ‘established on the inbound radial 068’.[23] In response, ATC cleared the crew to conduct a VOR runway 06 approach, with 10 NM to touchdown. Shortly after, the captain recalled the first officer asking, ‘do we descend now captain?’ In response, captain initiated a descent from 2,500 ft when the aircraft was at 9 DME[24] (Figure 3). Soon after, the landing gear was extended and the first officer selected 1,600 ft on the FCU for the next descent altitude limit. However, the operator’s Flight Crew Training Manual (FCTM) required that the go-around altitude be set on the FCU when established on final approach.[25] Coincidentally, 1,600 ft was the corresponding segment minimum safe altitude for the runway 03 VOR approach, whereas the published altitude for that stage of the runway 06 approach was 1,900 ft.
The captain elected to continue manually flying the aircraft using his primary flight display (PFD) and the first officer’s ND, and manually controlling the engine thrust due to the apparent automation failures. The first officer continued to monitor the descent gradient and vertical speed, and later recalled believing that they were on the correct descent profile. However, for most of the descent, the aircraft’s rate of descent exceeded the recommended rate (700 ft/min) that was published on the approach chart for the aircraft’s groundspeed. The maximum recorded rate of descent briefly reached 1,550 ft/min.
As the approach continued, the flight crew became concerned that they could not see the runway, and both crew became focused on locating the runway. The first officer later reported that because of this, he was no longer monitoring the approach segment minimum safe altitude constraint or was aware of the aircraft’s below flight path deviation during the descent. Although the FCU altitude was set to 1,600 ft, the autopilots were not engaged and the aircraft descended through the selected altitude without capturing the target altitude.
To assist in locating the runway, the first officer asked ATC if they were on the ‘left side of the runway or right side of the runway’. At about the same time, the ATC radar displayed a minimum safe altitude warning (MSAW). In response, the approach controller instructed the flight crew to ‘go round, you are low, low altitude alert, go round’. The flight crew acknowledged the alert and immediately conducted a missed approach. The aircraft had descended to an altitude of 1,473 ft, before the climb was initiated, which was about 400 ft below the segment minimum safe altitude (Figure 3). Aircraft track and flight data for the approach is available in Appendix B.
Figure 3: Profile view of first runway 06 VOR approach with aircraft flight profile (blue). The flight profile shows the crew descending the aircraft below the 2,500 ft segment minimum safe altitude and continuing below the 1,900 ft segment minimum safe altitude before conducting a go-around.
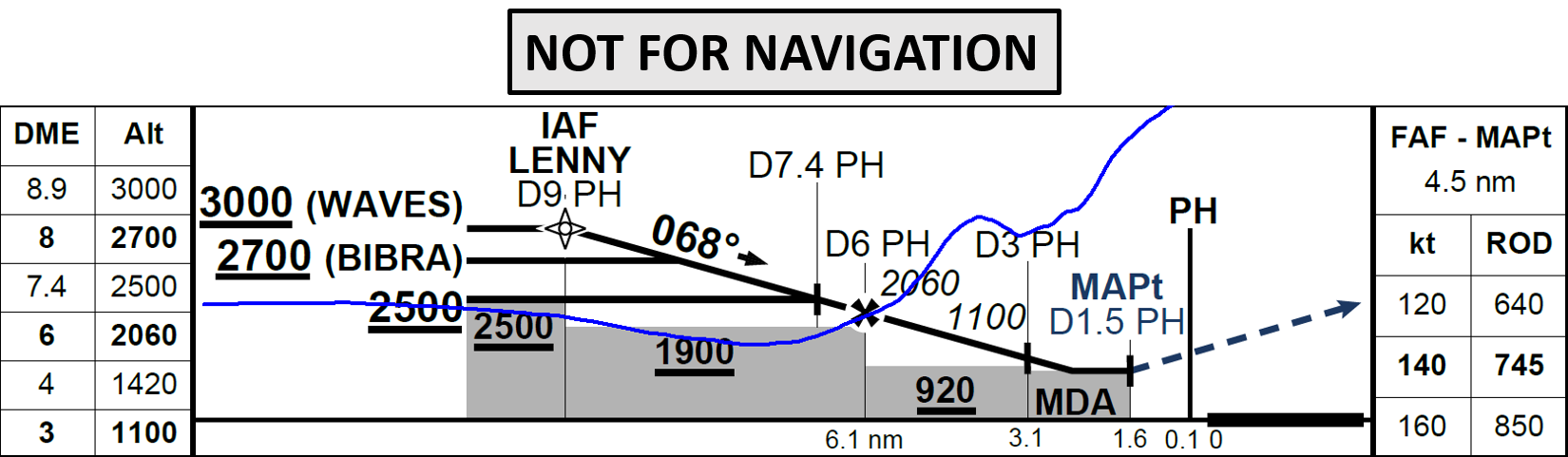
Source: Naviga (modified by the ATSB)
Preparation and conduct of the second runway 06 VOR approach
After completing the go around, ATC radar vectored the flight crew for another VOR approach for runway 06. At around 2204, while the aircraft was being radar vectored, the captain requested that the first officer take over as PF so he could review the approach chart.
At about 2208, the flight crew engaged the autothrust. It remained engaged and active for about 4 minutes, before the FCU autothrust pushbutton was pressed at 2212 and the thrust lock became active until the thrust levers were moved from the climb detent.[26] The crew re-engaged the autothrust about a minute later, and it remained active for 25 seconds before being disengaged, again via the FCU autothrust push button and resulting in a second thrust lock. The crew again moved the thrust levers clearing the thrust lock warning. The crew did not re-engage the autothrust for the remainder of the flight.
During the second VOR approach while the first officer was the PF, there were four occasions where the captain made sidestick control inputs. These inputs were between 2 and 3 seconds in duration and the recorded data indicates that they were not sufficiently large to activate the dual input alert. Neither of the flight crew could recall why the dual inputs occurred.
At about 2212, the captain requested ATC turn on the high intensity lighting on runway 06 as they were still having difficulty seeing the runway. ATC responded that there were no high intensity runway lights for that runway. At 2214, when the aircraft was at an altitude of 2,500 ft, inbound on the final approach track of the VOR and at about 8 DME, the captain took over as PF and the first officer resumed the PM role. At about the same time, ATC asked the crew if they had the runway in sight and informed them that the tower had increased the runway lighting intensity. Approaching 6 DME, the flight crew selected the FCU altitude to the minimum descent altitude for the VOR approach, again contrary to the operator’s procedure for conducting a non-precision instrument approach. The captain confirmed to ATC that the runway was in sight, and at about 5 DME, initiated descent from 2,500 ft to land on runway 06 (see Figure 4 for the profile view of their second approach to runway 06).
Due to the late commencement of the descent from 2,500 ft, the aircraft exceeded the recommended rate of descent (700 ft/min) for the aircraft’s groundspeed until 1,100 ft above the height of the runway threshold. In addition, the aircraft’s rate of descent was greater than 1,200 ft/min[27] for a period of 40 seconds, from an altitude of about 2,100 ft to 1,200 ft. In this period, the rate of descent averaged 1,380 ft/min. When the aircraft was 1,000 ft above the height of the runway threshold, the rate of descent was below 700 ft/min. For a period of 22 seconds, from 430 ft to 120 ft above ground level (AGL), the aircraft’s vertical speed exceeded 700 ft/min and increased to a maximum of 1,100 ft/min. As this decent rate was below 1,200 ft/min, it did not require a callout by the first officer. At 300 ft AGL, the engine thrust reduced briefly to idle and at this point, the aircraft did not meet the stabilised approach criteria. Aircraft track and flight data for the approach is available in Appendix C.
Recorded flight data indicated dual sidestick control inputs occurred, one at 300 ft AGL for one second, then three times from 120 ft AGL until landing with durations of 3 to 5 seconds, these inputs would have resulted in a dual control input alert. However, the aircraft landed without further incident.
Figure 4: Profile view of second runway 06 VOR approach with aircraft flight profile (blue)
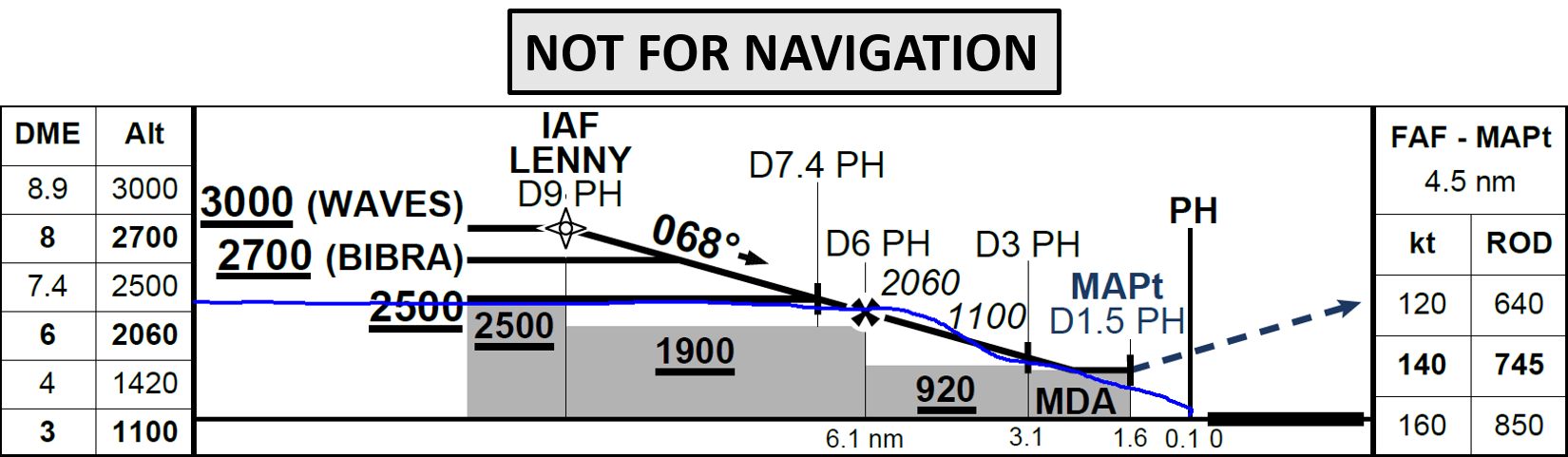
Source: Naviga (modified by the ATSB)
__________
- Pilot flying (PF) and Pilot monitoring (PM) are procedurally assigned roles with specifically assigned duties at specific stages of a flight. The PF does most of the flying, except in defined circumstances; such as when planning for the descent, approach and landing. The PM carries out support duties and monitors the PF’s actions and aircraft flight path.
- Australian Western Standard Time (AWST) was Coordinated Universal Time (UTC) +8 hours.
- At altitudes above 10,000 ft in Australia, an aircraft’s height is measured in hundreds of feet above the standard atmospheric pressure datum of 1013.25 hPa. A height 37,000 ft above that standard pressure datum would be expressed FL 370.
- The MCDU is used by the flight crew to enter flight planning into the flight management guidance system and can also display various flight navigation information.
- The ND is a flight deck information display that is part of the electronic flight instrument system which displays a selected navigation information to the flight crew.
- The FMGC provides aircraft navigation, lateral and vertical guidance and aircraft performance functions along a pre-planned flight route.
- AP1 utilises data from FMGC1.
- A standard ground aid to landing, comprising two directional radio transmitters: the localizer, which provides direction in the horizontal plane; and the glideslope, for vertical plane direction, usually at an inclination of 3°. This is a type of precision approach procedure, designed for 3D instrument approach operations.
- It would have been possible for the captain’s ND to mirror the first officer’s, if their ND range and mode settings were the same.
- A designated arrival route that links a significant point along the planned route to a point from which a published instrument approach procedure can be commenced.
- Runway 21 was a precision approach runway, equipped with a category I ILS and visual approach aids.
- Managed modes: When the aircraft is using managed targets, the Flight Management and Guidance System (FMGS) guides it along lateral and vertical flight paths and speed profiles computed by the Flight Management function (FM) from data in the MCDU. FM manages the guidance targets.
- Selected modes: When the flight crew is using selected targets, the FMGS guides the aircraft along lateral and vertical flight paths and speed profiles to meet targets that the flight crew has selected manually on the FCU. The flight crew selects the guidance targets.
- This warning indicates that the elevation of the landing airport is not available from the FMGC and consequently, the landing elevation must be manually selected.
- With a single autopilot engaged the on-side FMGC is master. With both autopilots engaged, FMGC1 is master.
- Flight control unit: Located on the cockpit glareshield and is the short-term interface between the flight crew and the FMGC. It is used to modify flight parameters and engage or disengage the autopilot and autothrust functions. Different guidance modes can be selected to change various targets (speed, heading, track, altitude, flight path angle and vertical speed).
- A manoeuvre in which the flight crew discontinues the approach, increases engine thrust and reconfigures the aircraft to climb.
- The autothrust was disconnected via the instinctive disconnect pushbutton on the thrust lever.
- See further details in REF _Ref458419455 \h \* MERGEFORMAT Handover/takeover procedures section.
- A ground-based navigation aid that emits a signal that can be received by appropriately-equipped aircraft and represented as the aircraft’s bearing (called a 'radial') to or from that aid.
- Runway 06 was a non-precision approach runway, equipped with visual approach aids and a navigation aid at the airport provided directional guidance to complete a straight-in approach.
- This was a non-precision approach procedure, designed for 2D instrument approach operations.
- To fly inbound towards the VOR on the 248° radial, the crew needed to select 068° on the omni bearing selector.
- Distance Measuring Equipment (DME) is a ground-based transponder station. A signal from an aircraft to the ground station is used to calculate its distance (in nautical miles) from the ground station.
- This procedure was stipulated to avoid any unwanted autopilot capture of the selected target altitude.
- See REF _Ref499907660 \h \* MERGEFORMAT Types of dual control inputs section for further information on the thrust lock condition and how crew are to respond to it.
- During the final approach, the PM was required to call out ‘sink rate’, when the descent rate exceeded 1,200 ft/min.
Personnel information
The captain
The captain was an Indonesian national and held an Indonesian Airline Transport Pilot Licence (ATPL) and had accumulated about 13,500 hours of aeronautical experience. Of these, about 9,250 hours were in command and about 5,200 hours were on the A320. The captain reported flying into Perth 3 to 4 times a month (including a night approach on 13 February 2016), and conducting a VHF Omni Directional Radio Range (VOR) approach on runway 06 previously, although not often. The captain had conducted a VOR approach on 18 February, the day prior to the occurrence and reported that he regularly conducted non-precision VOR approaches into his home port of Denpasar.
The captain’s proficiency check records indicated that during the 6-month period prior to the occurrence he had successfully completed a non‑precision approach during his cyclic simulator training. His training record for September 2015 recorded competency with managing a flight management and guidance computer (FMGC) or instrument failure. The captain had been assessed as meeting the requirements of the International Civil Aviation Organization (ICAO) English language proficiency[28] at a level 4 standard.
The captain held the relevant Indonesian Certificate of Medical, First Class. That certificate required the pilot to wear corrective lenses for vision.
The first officer
The first officer, a Japanese national, held an Indonesian Commercial Pilot (Aeroplane) Licence (CPL) and had accumulated about 4,200 hours of aeronautical experience, with approximately 3,100 hours on the A320. The first officer had flown into Perth previously, but the occurrence flight was the first time he had conducted an approach into Perth at night, and it was his first runway 06 VOR approach. The first officer had conducted a VOR approach on the day prior to the incident and reported that he regularly conducted VOR approaches into Denpasar.
The first officer’s proficiency check records indicated that during the 6-month period prior to the occurrence he had successfully completed a non‑precision approach during his cyclic simulator training, including a non-precision approach and landing. The first officer had been assessed as meeting the requirements of the ICAO English language proficiency at a level 5 standard.
The first officer held the relevant Indonesian Certificate of Medical, First Class. That certificate required the pilot to wear lenses that correct for distance vision and possess glasses that correct for near vision.
Fatigue considerations
The flight crew reported feeling alert during the approaches. The ATSB reviewed their flight and duty times and 72-hour history prior to the occurrence, and found no evidence that they were likely to be affected by fatigue at the time of the incident.
Approach speed
The approach speed (VAPP) was computed for the crew by the flight management guidance computer (FMGC) and was based on the aircraft’s stall speed in the selected landing configuration, plus one third of the headwind component calculated from the airport wind entered by the flight crew into the FMGC.[29]
When operating in managed speed mode and to assist with maintaining the energy state of the aircraft in changing wind conditions, the FMGC also continuously calculated a target speed that took into account the instantaneous wind being experienced by the aircraft. That resulted in the target airspeed displayed to the crew on their primary flight displays increasing with strengthening headwind gusts and decreasing with weakening headwind or tailwind gusts (but not below VAPP). If the wind entered by the crew into the FMGC was the same as the instantaneous wind, then the target speed would be VAPP.
For the non-precision approaches to runway 06, the crew were operating the aircraft without the autopilot, autothrust engaged and consequently, were in selected speed mode, and the target speed displayed to the flight crew was VAPP.
Weather
At the time of the approaches, moderate to severe turbulence was forecast below 3,000 ft and ATC had received reports of windshear below 1,600 ft (see Table 1).
Table 1: Actual weather conditions as reported by successive ATIS reports at around the time of the flight by PK-AXY
| Condition/requirement | ATIS and time issued | ||
| ‘Romeo’ issued at 2132 | ‘Sierra’ issued at 2153 | ‘Tango’ issued at 2155 | |
| Runway | Runway 21 | Runway 06 | Runway 06 |
| Wind | 120º M at 16 kt | 100º M at 16 kt gusting to 28 kt | 100º M at 16 kt gusting to 28 kt |
| Crosswind | Max 16 kt | Max 15 kt | Max 15 kt |
| Cloud and visibility | CAVOK[30] | CAVOK | CAVOK |
| Significant weather warning |
Moderate to severe turbulence reported below 3,000 ft B737 reported moderate undershoot and overshoot windshear below 1,600 ft on final approach, runway 21 at 1330 |
Moderate to severe turbulence reported below 3,000 ft Windshear warning |
Moderate to severe turbulence reported below 3,000 ft |
Analysis of the recorded information confirmed that turbulent conditions existed in the vicinity of Perth Airport at the time of the aircraft’s arrival. However, there were no activations of the aircraft’s windshear warning system[31] nor activation of the aircraft’s low-speed flight envelope protection systems.
Airport beacon and runway 06 lighting
The control tower at Perth Airport was equipped with a rotating aerodrome beacon, used to indicate the location of the airport from the air. The beacon alternated between a white and green flashing light, once every 6 seconds.
Runway 06/24 was equipped with high intensity runway lighting, selectable by the tower controller to six stages of intensity. It was also equipped with medium intensity runway lighting, selectable to three stages of intensity. There was no high intensity approach lighting for runway 06 or other lighting[32] to assist pilots identify the runway threshold, and nor was such lighting required. The high intensity runway lighting was selected to stage six (maximum intensity) for the crew’s second approach to runway 06.
Flight management guidance system failure
During the cruise, the flight crew received a red text message on the captain’s blank navigation display (ND) stating MAP NOT AVAIL and the first officer’s multipurpose control and display unit (MCDU2) displayed INDEPENDENT OPERATION. The captain’s ND remained inoperative, with the MAP NOT AVAIL message for the remainder of the flight.
The operator’s Flight Crew Operating Manual (FCOM) indicated that a ND may display a MAP NOT AVAIL message for several reasons:
- The MODE CHANGE or RANGE CHANGE message has been displayed more than 6 seconds, or
- The FMGC has failed, or
- The FMGC has delivered an invalid aircraft position.
The MCDU may display an INDEPENDENT OPERATION message when the FMGCs operate independently of each other. In this case, the flight directors (FD) will also operate independently from one another, with the captain’s FD receiving data from FMGC1. The flight crew had access to the aircraft’s Quick Reference Handbook (QRH) and FCOM during flight. These documents were available for the crew to reference in the event of an aircraft system issue, such as a flight management guidance system (FMGS) failure.
Quick reference handbook
Within the ‘Abnormal and emergency procedures’ section of the QRH, under auto flight there is only one listed procedure, ‘Loss of FMS Data in Descent / Approach (Severe Reset)’. This procedure would not have been relevant at the time of the failure, as it occurred during cruise. However, the computer reset table located in the ‘Miscellaneous procedures’ section was relevant. The crew could not explain why they were unable to locate the relevant information.
The Airbus A320 QRH included a procedure to address one locked or blank MCDU, and another for both MCDUs locked (or blank) or FMGC malfunction. The inflight procedure for one locked/blank MCDU was to ‘Pull the CB [circuit breaker] for the locked or blank MCDU and push it back after 10 s[econds]’. The QRH procedure for both MCDU’s locked / FMGC malfunction was:
Short FMGC Reset: …
In flight:
‐ FD 1(or 2) (OFF)
‐ Pull the CB [circuit breaker] of the affected FMGC
‐ Reset it after 10 s[econds].
Long FMGC Reset: …
In flight:
‐ FD 1(or 2) (OFF)
‐ Pull the CB of the affected FMGC
‐ Reset it after 15 min[utes].
Note: Consider a long FMGC reset only if a short FMGC reset has no effect.
In this instance, the crew recognised that the frozen MCDU1 screen and other system indications suggested a FMGC failure, but conducted neither procedure.
Flight crew operating manual
The FCOM contained a number of different types of FMGS failures and related procedures. These were located in the Procedures section, under ‘Supplementary Procedures’. The table of contents for the supplementary procedures contained a section on auto flight with a subsection related to ‘FMGS Reset and Other Abnormal procedures’. The crew could not explain why they were unable to locate the relevant information.
The failure mode that most closely represented the messages the crew received, related to one flight management system (FMS) failing and latching, but with the FMS continuing to send valid but frozen guidance targets, corresponding to the last valid targets sent before the FMS failed. With this type of failure, the autopilot and FD on the affected side may remain available, and the failed FMGC continues to guide the aircraft using the frozen targets. The FCOM stated that the procedure for this failure is to:
DISREGARD the information coming from the failed side
DO NOT USE the AP [autopilot] on the affected side
- If the AP is engaged on the affected side:
FLY the aircraft back on the intended path
ENGAGE the AP on the operative side, according to the Recommended Practice for
Autopilot Engagement (Refer to FCTM/OP-030 Autopilot/Flight Director)
- If time permits:
PERFORM a long reset of the failed FMGC
Refer to PRO-SUP-22-10 Manual FMGS Reset - Manual Reset of One FMGC
- If the failure affects FMGC1, and if the FMGC1 is still failed and latched before the approach:
DO NOT USE AP1 for the approach
- Before disconnecting AP2:
REVERT to selected speed
DISCONNECT A/THR [autothrust]
Note: It prevents the A/THR from switching to the frozen speed target of the failed FMGC1 when the flight crew disconnects the AP2 for landing.
Dual control inputs on the sidestick
On the A320, each pilot has a sidestick that they can use to manually control the pitch and roll attitude of the aircraft. When the autopilot is engaged, the sidesticks are locked in the neutral position. If a pilot applies a force above a specific threshold, the sidestick becomes free and the autopilot disengages.
The handgrip on the sidestick contains a takeover push button. This button can be used to disconnect the autopilot or takeover from the opposite sidestick.
When the pilots move both sidesticks simultaneously, neither takes priority, and instead the system adds the signals of both sidesticks, with the total limited to the maximum deflection of a single sidestick. If there is a simultaneous deflection of both sidesticks, with a 2º off-neutral deflection, the two green ‘sidestick priority’ lights in the instrument panel’s glareshield illuminate and there will be a ‘dual input’ voice message.
Either pilot can deactivate the other sidestick and take full control by pressing and holding down the priority takeover pushbutton. If the takeover pushbutton is depressed for 40 seconds, the other sidestick is deactivated. It can be reactivated by momentarily pressing the pushbutton of either sidestick.
There was no record of either the captain or the first officer pushing the priority takeover pushbutton during the ILS approach, go-arounds, or during the remainder of the flight.
Handover/takeover procedures
To transfer controls the FCOM stated that the crewmembers must use the following callouts:
‐ To give control: The pilot calls out “YOU HAVE CONTROL”. The other pilot accepts this transfer by calling out “I HAVE CONTROL”, before assuming PF duties.
‐ To take control: The pilot calls out “I HAVE CONTROL”. The other pilot accepts this transfer by calling out “YOU HAVE CONTROL”, before assuming PM duties.
In addition, the Flight Crew Training Manual (FCTM) stated that ‘If the PM (or Instructor) needs to take over, the PM must press the sidestick takeover pushbutton, and announce: “I have control”.’
Types of dual control inputs
Airbus has analysed dual sidestick input events that have been reported to them. In Safety First, The Airbus Safety Magazine (December 2006), Airbus reports that they have found that there are three types of occurrences:
The “Spurious” Dual Stick inputs
Typically due to an inadvertent movement of the stick by the PNF [PM].
For example when grabbing the FCOM or when pressing the R/T [radio].
A spurious dual stick input only marginally affects the aircraft behavior due to only time limited & small inputs.
The “Comfort” Dual Stick inputs
Typically due to short interventions from the PNF [PM] who wants to improve the aircraft’s attitude or trajectory:
These are generally experienced in approach, during a capture (altitude localizer), or in flare, and have minor effects on the aircraft’s altitude/trajectory.
However, as the PF is not aware of the PNF’s [PM] interventions, he may be disturbed and may counteract the PNF’s [PM] inputs.
The “Instinctive” Dual Stick Inputs
Typically due to a “reflex” action on the part of the PNF [PM] on the stick. This instinctive reaction may come about when an unexpected event occurs, like for example an AP disengagement, an overspeed situation or a dangerous maneuver.
Such interventions are more significant in terms of stick deflection and duration. Usually in such situations, both pilots push the stick in the same direction, which may lead to over control, a situation illustrated by the above occurrence.
Autothrust system
Autothrust can be activated when the thrust levers are in the climb detent and the flight crew press the autothrust pushbutton on the flight control unit (FCU). When active the autothrust controls either airspeed or engine thrust as appropriate.
The autothrust will disconnect if the:
- autothrust fails
- autothrust pushbutton on the FCU is pressed[33]
- instinctive disconnect button on the thrust lever is pressed
- both thrust levers are set to idle.
The thrust lock function is activated when the thrust levers are in the climb detent and either of the flight crew pushes the autothrust pushbutton on the FCU, or the autothrust disconnects due to a failure. When this occurs, the thrust is locked at its level prior to disconnection. Moving the thrust levers out of the climb detent suppresses the thrust lock and associated warnings and gives the crew manual control with the thrust levers.
When the thrust lock function is active:
- THR LK flashes amber on the flight mode annunciator (FMA)
- electronic centralised aircraft monitor (ECAM) displays ENG THRUST LOCKED and this message flashes every 5 seconds
- ECAM displays THR LEVERS …... MOVE
- A single chime sounds and the master caution light flashes every 5 seconds.
Stabilised approach criteria
The FCOM specified that in visual conditions the approach should be stabilised at 500 ft above ground level (AGL). In order to be stabilised all of the following conditions had to be verified and meet at the stabilisation height:
- the aircraft is on the correct lateral and vertical flight path
- the aircraft is in the desired landing configuration
- the thrust is stabilised, usually above idle, in order to maintain the target approach speed along the desired final approach path
- there is no excessive flight parameter deviation.
If the aircraft was not stabilised by 500 ft AGL in visual conditions the crew were required to conduct a go-around, unless the flight crew estimated that only small corrections were necessary to rectify minor deviations from stabilised conditions due, amongst others, to external perturbations.
Non-precision instrument approach
The Flight Crew Training Manual (FCTM) indicated that the overall strategy for conducting a non-precision instrument approach was to fly it ‘ILS alike’ with the same mental image or representation and similar procedure. The use of autopilot was recommended for all non-precision approaches as it reduced flight crew workload and facilitated monitoring of the procedure and the aircraft’s flight path. If the flight crew correctly programmed the FMGC, the autopilot and FD would ensure lateral and vertical managed guidance was available to conduct the approach.
Depending on whether the autopilot was being used, the PF either monitored the progress of the approach or provided the manual inputs to manage the aircraft’s lateral and vertical navigation, normally using the guidance targets displayed on the FD. In addition, the FCTM indicated that when conducting a non-precision instrument approach, the PF ‘should expand the instrument scan to include outside visual cues’ as the aircraft approached the minimum descent altitude.
The operator’s FCTM stipulated setting the go-around altitude on the FCU when the aircraft was established on final approach and if in a selected mode, the current aircraft altitude was below the missed approach altitude. The FCTM also prohibited setting the minimum descent altitude as the target altitude on the FCU, which could cause a spurious altitude capture and destabilisation of the approach at a critical stage.
Communication and standard callouts
The FCTM stated that if, for any reason, one parameter deviates from stabilised approach conditions, the PM will make the appropriate callout as follows:
| Parameter | Exceedance | Callout | ||
| Indicated airspeed | Speed target +10 kt / -5 kt | “SPEED” | ||
| Vertical speed | Descent rate exceeds 1,200 ft/min | “SINK RATE” | ||
| Pitch altitude | +10º / -2.5º | “PITCH” | ||
| Bank angle | 7º | “BANK” | ||
| ILS Only | Localiser | Excess deviation | ½ dot PFD | “LOC” |
| Glideslope | ½ dot PFD | “GLIDE” | ||
| Non precision approach | Cross track error greater than 0.1 NM | “CROSS TRACK” | ||
| Vertical deviation greater than ½ dot | “V/DEV” | |||
| Course greater than 2.5º (VOR) | “COURSE” | |||
| Course greater than 5º (Automatic direction finder) | “COURSE” | |||
| Altitude distance check | “___FT HIGH (LOW)” | |||
Altitude callouts were also to be made by the PM through to landing. Neither the captain nor first officer recollected any callouts being made.
Related occurrences
A search of the ATSB database for similar occurrences in the last 5 years was conducted. The search did not identify any occurrences where a flight crew had difficulty locating Perth Airport or the runways in CAVOK conditions.
The database contained six occurrences where an enhanced ground proximity warning system (EGPWS) glideslope warning had occurred during the runway 06 VOR approach. Of these, four related to the inadvertent selection of the ILS for another runway. There were a further 25 cases of glideslope warnings where the runway was not identified in the occurrence details. There was one record of an EGPWS terrain warning occurring at Perth although the approach involved was not identified. The occurrence details in that case suggested the terrain warning was spurious. There were no occurrences recorded in the ATSB occurrence database where an minimum safe altitude warning was issued by ATC during a runway 06 approach.
ATSB investigation AO-2010-027
On 4 and 29 May 2010, an Airbus A330 aircraft, operated by AirAsia X was involved in two separate occurrences on approach to the Gold Coast, Queensland, where the aircraft were descended below the segment minimum safe altitudes.[34] On both occasions, there was low cloud and reduced visibility on arrival at the Gold Coast. The ATSB found that these events were indicators of a minor safety issue regarding the operator's training of its flight crews, in relation to non-precision approaches.
ATSB investigation AO-2011-086
On 24 July 2011, a Boeing Company 777-3D7 aircraft, operated by Thai Airways, was conducting a runway 34 VOR approach to Melbourne Airport, Victoria.[35] During the approach, the tower controller observed that the aircraft was lower than required and asked the flight crew to check its altitude. The tower controller subsequently instructed the crew to conduct a go-around. However, while the crew did arrest the aircraft’s descent, there was a delay of about 50 seconds before they initiated the go-around and commenced a climb to the required altitude.
The ATSB established that the pilot in command may not have fully understood some aspects of the aircraft’s automated flight control systems and probably experienced ‘automation surprise’ when the aircraft pitched up to capture the VOR approach path. As a result, the remainder of the approach was conducted using the autopilot’s flight level change mode, where the aircraft’s rate of descent may be significantly higher than required. In addition, the flight crew inadvertently selected a lower than stipulated descent altitude, resulting in descent below the specified segment minimum safe altitude for that stage of the approach.
ATSB investigation AO-2011-076
On 30 June 2011, an Airbus A320 aircraft, operated by Tiger Airways Australia conducted a go-around procedure at Avalon Airport, Victoria, after an unsuccessful approach to runway 18.[36] While re-positioning the aircraft for another approach, this time on the reciprocal runway 36, the aircraft descended without further ATC clearance to below the assigned altitude. The flight crew was subsequently cleared for a visual approach; however, the aircraft descended to below the minimum permitted altitude of 2,000 ft, to 1,600 ft. The ATSB investigation found that the flight crew’s understanding of the aircraft’s position during the second approach was probably influenced by the workload associated with the runway change.
ATSB investigation AO-2016-124
On 11 September 2016 an Airbus A330 aircraft, operated by AirAsia X descended below the segment minimum safe altitude, near the Gold Coast Airport, Queensland.[37] The flight crew were cleared to conduct a RNAV-Z (GNSS) instrument approach to runway 14 at Gold Coast Airport in visual meteorological conditions. During the approach, the aircraft was observed to descend below a segment minimum safe altitude. At the time of publication, the ATSB investigation was ongoing.
__________
- ICAO has defined six levels of language proficiency, the top three levels (4, 5 and 6) are acceptable for operational flight crew. Level 4 (operational) requires retesting every 3 years, level 5 (extended) requires retesting every 6 years and level 6 (expert) does not require further testing.
- The calculation of VAPP by the FMGC was limited to the stall speed plus 5 kt as a minimum and stall speed plus 15 kt as a maximum. The FMGC-calculated value of VAPP can also be modified by the flight crew.
- Ceiling and visibility OK, meaning that the visibility, cloud and present weather are better than prescribed conditions. For an aerodrome weather report, those conditions are visibility 10 km or more, no significant cloud below 5,000 ft or cumulonimbus cloud and no other significant weather within 9 km of the aerodrome.
- Windshear detection is provided during takeoff and landing. During landing, the system is active from 1,300 ft to 50 ft radio altitude, with wing slat/flap selected.
- Such lighting could include runway lead-in lighting, runway threshold identification lights and sequenced flashing lights.
- This is not a recommended method of disconnecting the autothrust, as it will result in the engines entering the thrust lock mode.
- ATSB AO-2010-027, Operational non-compliances - Airbus A330, 9M-XXB, Gold Coast Airport, Queensland, 4 and 29 May 2010. Available from www.atsb.gov.au.
- ATSB AO-2011-086, Operational non-compliance involving Boeing 777, HS-TKD, 15 km south Melbourne Airport, Vic, 24 July 2011. Available from www.atsb.gov.au.
- ATSB AO-2011-076, Descent below the minimum permitted altitude, Airbus A320, VH-VNC, 15 km SSE of Avalon Airport, Vic, 30 June 2011. Available from www.atsb.gov.au.
- ATSB AO-2016-124, Decent below segment minimum safe altitude involving Airbus A330-343X, 9M-XXI, near Gold Coast Airport, Qld, on 11 September 2016. On completion, a copy of the investigation report will be available from www.atsb.gov.au.
During the flight, the captain’s flight management guidance computer (FMGC1) failed. The flight crew’s response to this and their utilisation of FMGC1 during the runway 21 instrument landing system (ILS) approach, resulted in an unexpected increase in engine thrust and subsequent go-around. After conducting the go-around, they were required to change runways due to increased crosswind and conduct a VHF Omni Directional Radio Range (VOR) approach onto runway 06. During this VOR approach, air traffic control (ATC) received a minimum safe altitude warning, prompting the controller to alert the crew of their low altitude and instructed them to conduct a go-around. Subsequently, the flight crew made another approach for runway 06 and the aircraft landed safely.
The following analysis discusses the crew’s understanding and management of the FMGC failure, their systems knowledge, and the human performance factors that affected the management of the approaches, which resulted in two go-arounds.
Crew response to the flight management guidance system failure
During the cruise, when the captain identified that his multipurpose control and display unit (MCDU1) had frozen and the navigation display (ND) map became unavailable, the flight crew correctly identified an FMGC1 failure. However, they could not locate any information about how to resolve it in the aircraft’s manuals. Had they found the MCDU and FMGC reset procedures in the Quick Reference Handbook (QRH), the crew may have been able to rectify the failure. This would have provided normal operation of the captain’s navigation display ND and MCDU. With an operational MCDU, the captain would have been able to input the approach and aerodrome data into the FMGC1 and the unexpected increase in engine thrust would not have occurred.
Additional information on the failure mode was available in the Flight Crew Operating Manual (FCOM), but the flight crew did not find this information in that manual. The investigation was unable to determine why the crew did not locate the relevant information. This failure to find and action the QRH and FCOM, meant the aircraft systems remained degraded for the rest of the flight.
Understanding of system interactions and subsequent crew decision making during the runway 21 ILS approach
The flight crew discussed the FMGC1 failure during their first approach briefing and decided to use the first officer’s functioning MCDU (MCDU2) and ND on the descent. Because the crew had not previously found the information in the FCOM relating to the failure, they did not understand how it could affect the interactions between the aircraft systems and hence the conduct of the descent. They were therefore unaware that both autopilots, and in particular autopilot 1 (AP1), should not have been engaged during the instrument approach. The reason for not engaging AP1 was that FMGC1 took primacy over the first officer’s FMGC (FMGC2) when both autopilots were used and the data in FMGC1 had frozen at the time of failure.
When the flight crew engaged AP1 during the first approach, they did not recognise that the subsequent cabin pressure fault was related to the engagement of AP1 and its utilisation of FMGC1 data. Additionally, the crew did not realise that the FMGC1 target speed at the time of failure (253 kt) would be utilised when the speed mode was changed from a selected mode (which had a target speed of 160 kt at the time), to a managed mode after AP1 was engaged.
The issue of flight crew understanding systems interactions is not limited to this occurrence. In response to the increase in incident and accident reports of flight crew experiencing difficulties using flight path management systems, a United States Federal Aviation Administration-led Flight Deck Automation Working Group analysed several data sources to produce findings and recommendations for the use of automation on modern flight decks. The working group found that operators had concerns with the level of flight crew skills required for managing automated system malfunctions and/or failures. The working group was cognisant that it was impossible to train pilots in all possible malfunction situations or failure scenarios. They stated that pilots needed to be prepared to recognise the results of partial and complete system failures and intervene appropriately (PARC/CAST Flight Deck Automation Working Group, 2013).
Crew’s understanding of systems interactions and dual control inputs
In this case, the flight crew’s lack of understanding of how the systems interacted led to inappropriate system selections and resulted in the increase in engine thrust. Although the failure of FMGC1 had not been resolved by the flight crew prior to the aircraft commencing descent, FMGC2, MCDU2, autopilot 2 (AP2) and engine autothrust were all capable of normal operation and could have been used to complete the approach normally.
Although the flight crew elected to conduct a go-around when the engine thrust unexpectedly increased, there was a period of 25 seconds where dual sidestick control inputs occurred, prior to the captain taking over control of the aircraft. These dual control inputs indicate a level of confusion and lack of communication regarding conduct of the go-around and about which pilot was in control of the aircraft. There were other instances of dual control inputs of short duration (less than 5 seconds). While these inputs did not affect the flight, there have been other instances where sustained dual control inputs have had a detrimental effect on the control of the aircraft.
Reaction to automation functionality and decision making
Following the go-around and without understanding the reason for the increase in engine thrust or the effect the FMGC1 failure had on the system, the flight crew briefly re-engaged AP1. Due to doubts about the functionality of the automation, the captain then elected to reduce the level of automation, and manually fly the aircraft. This decision presented as being intuitively derived from patterns of behaviour the captain had used successfully in the past. The decision had the effect of removing the potentially problematic automation, but it also increased the crew’s workload.
Researchers (Klein 2008, Kahneman, 2011) have stated that, in time-constrained environments, individuals can make decisions using intuitive reasoning where the steps are often unconscious and based on pattern recognition. For intuitive or naturalistic decision-making, an experienced individual will identify a problem situation as similar or familiar to a situation they have dealt with before and will extract a plan of action from memory. If time permits, they will confirm their expectations prior to initiating action. If time does not permit, actions will need to be initiated with uncertainty that may result in a poor decision.
Crew workload after the initial go-around
Workload has been defined by Orlady and Orlady (1999) as:
…reflecting the interaction between a specific individual and the demands imposed by a particular task. Workload represents the cost incurred by the human operator in achieving a particular level of performance (p.203).
The available cognitive resources are finite and will vary depending on the experience and training of the individual as well as the level of stress and fatigue experienced. Workload is managed by balancing task demands such that, when workload is low, tasks are added and when workload becomes excessive, tasks are shed (Orlady and Orlady, 1999). Tasks, such as internal and external communication, can be shed in an efficient manner by eliminating low priority tasks or they can be shed inefficiently by abandoning important tasks. The task demands can be influenced by the mental and physical requirements of the task, as well as the time available (Wickens and Hollands, 2000).
Factors increasing crew workload
After the first approach, the flight crew’s workload increased substantially with the following conditions:
- although the engine autothrust, AP2 and FMGC2 were still operating normally, the crew became uncertain about the automation’s functionality and elected to manually control the engine thrust and fly the aircraft using raw data.
- the crew had limited experience, outside of simulator sessions, flying approaches manually.
- the turbulent conditions increased the attention required by the captain to maintain desired heading, pitch attitude and airspeed.
- the unexpected runway change meant the crew needed to program the approach into the first officer’s MCDU, review the approach and conduct a briefing prior to the approach.
- the unexpected runway change and reduced timeframes limited the time available for the crew to review the approach charts.
- the captain’s ND was still in operating in a degraded mode and was not displaying lateral tracking guidance for the VOR approach nor the information from the distance measuring equipment (DME). For that information, the captain needed to refer to the first officer’s ND on the other side of the cockpit instrument panel.
- the captain’s flight director (FD) was still referencing the frozen FMGC1 and was not providing valid FD attitude guidance targets.
- while the crew were experienced in flying non-precision VOR approaches, they had limited experience flying the Perth runway 06 VOR approach at night. The first officer reported never having flown the approach before.
Recorded data indicates that there was 8 minutes from making the decision to conduct the VOR approach to when the flight crew confirmed they were established on the approach, at 10 NM. The limited time available to prepare for the approach, combined with the degraded systems, would have further increased their workload.
Effect of increased workload
Workload and time pressure can lead to a reduction in the number of information sources an individual may access, and the frequency or duration of time these sources are checked (Staal, 2004). Amongst other effects, a high workload can result in individuals not understanding the implications of the information they are presented with.
In this occurrence, the captain’s workload was increased due to the decision to hand-fly the aircraft using the first officer’s ND for lateral tracking guidance and distance information during the VOR approaches. This increased workload made it more likely that, in the visual conditions, he would try and continue the approach using external visual reference.
The flight crew’s workload impacted their ability to manage the approaches and was evidenced by the shedding of tasks, such as:
- reviewing the approach charts,
- monitoring of the flight profile,
- descending the aircraft without confirming the aircraft position,
- neither crew member observing the DME distance,
- breakdown in the crews’ use of standard operating procedures, such as selecting altitudes other than the missed approach altitude on the flight control unit, while conducting the non-precision instrument final approach.
Had the flight crew elected to hold and prepare prior to conducting the approach, they may have reduced their workload, improved their preparations and conducted a thorough briefing prior to conducting the unfamiliar approach.
Preparation and conduct of the first runway 06 VOR approach
During the first runway 06 VOR approach, the flight crew’s focus of attention was outside the aircraft, attempting to locate the runway. Although the crew were conducting the instrument approach in visual conditions, more attention should have been given to maintaining the aircraft on the prescribed instrument approach flight path profile, until reference was made to the runway landing environment and/or the instrument approach was discontinued. The following content explains how the crew's ability to monitor and maintain the correct flight profile and altitude during the approach was likely hindered. This resulted in the aircraft descending below the specified minimum safe altitude without being detected by the crew.
Crew focus of attention
The captain could not identify the runway and requested assistance from the first officer. Both flight crew then focused on locating the runway, with neither appearing to monitor the aircraft’s flight profile. The crew first became aware of the altitude constraint and that the aircraft had descended below it when advised by ATC. This indicates that both crew were distracted and neither was monitoring the approach at this time. Further indications that the crew was distracted from monitoring the approach included:
- the captain took the first officer’s question about when to initiate descent as a prompt to descend without confirming the aircraft’s position.
- the lack of detection that the aircraft was descended early.
- the first officer thought aircraft was on correct profile because he observed an appropriate initial descent rate.
- the descent rate increased substantially above that necessary for a 3-degree approach.
- neither crew member observed the DME distance, after initiation of descent.
- the first officer could not recall communicating altitude or distance information during the approach.
Crew ability to monitor the approach
Monitoring is an extensive set of behavioural skills that all flight crew are expected to have. This skill set is specified in the aircraft operator’s standard operating procedures and involves the primary roles of monitoring the aircraft’s flight path, communications and the activities of the pilot flying. The UK Civil Aviation Authority (UK CAA) (2013) has defined monitoring as:
The observation and interpretation of the flight path data, configuration status, automation modes, and on-board systems appropriate to the phase of flight. It involves a cognitive comparison against the expected values, modes, and procedures. It also includes observation of the other crew member and timely intervention in the event of deviation. (p.9)
The difficulties that flight crew have with maintaining effective monitoring are thought to be due to not directly controlling the system being monitored. Humans are inherently poor at maintaining vigilance for infrequent events and equipment failures in modern airline operations are rare. Flight crew rarely receive direct feedback on the effectiveness or consistency of their monitoring unlike the feedback they would receive when they may fly an aircraft manually (UK CAA, 2013).
Researchers (Dismukes & Berman, 2010) found that in most instances where flight crew were failing to monitor the aircraft state or position, there were competing concurrent task demands on the crew’s attention. Humans have a limited ability to divide attention amongst tasks and generally, have to switch attention back and forth between tasks. This leaves an individual vulnerable to losing track of the status of one task while being engaged in another.
Other factors affecting awareness of the flight profile
Believing they were on the correct profile, based on the vertical speed the first officer observed early in the descent, combined with the night conditions, and unfamiliarity with the approach reduced the visual cues outside of the cockpit available to the crew regarding the aircraft’s position. The reduced external visual cues along with the crew not utilising the available internal visual cues, such as the course deviation indicator, distance information and multifunction display, led to the crew not understanding where they were on the flight profile or where they were with respect to the runway.
Communication during the approach
The flight crew missed opportunities to identify the early descent, higher than normal rate of descent and descent below the segment minimum safe altitude because they were focused outside the cockpit rather than monitoring their primary flight instruments. The first officer did not provide the captain with the standard altitude and distance callouts, nor with an alert about the rate of descent, which resulted in the aircraft flying below the flight profile. This potentially reduced the captain’s awareness of the deviations from the standard approach and limited his ability to correct it. That communication was particularly important given that the crew had not optimised the aircraft’s remaining systems, with the captain attempting the approach without his ND and FD attitude guidance targets on his primary flight display.
Preparation and conduct of the second runway 06 VOR approach
During the vectoring for the second runway 06 VOR approach, the captain took on the pilot monitoring role. This gave the captain the opportunity to review the approach data and familiarise himself with the required flight profile. The captain returned to the role of pilot flying soon after the initial approach fix and elected to obtain visual contact with the runway prior to initiating the descent. Due to the late descent, the aircraft’s rate of descent was greater than 1,200 ft/min for a period of the approach (although it was stabilised by 1,000 ft).
Due to the captain manually controlling the engine thrust and the turbulence, the engine thrust was briefly at idle at about 300 ft above ground level, which did not meet the stabilised approach criteria and was coincident with an increasing rate of descent. Unstable approaches are known to increase risks in landing, although in this instance the landing was completed without further incident.
From the evidence available, the following findings are made with respect to the operational event involving an Airbus A320, registered PK-AXY and operated by PT Indonesia AirAsia that occurred 17 km west-south-west of Perth Airport, Western Australia on 19 February 2016. These findings should not be read as apportioning blame or liability to any particular organisation or individual.
Safety issues, or system problems, are highlighted in bold to emphasise their importance. A safety issue is an event or condition that increases safety risk and (a) can reasonably be regarded as having the potential to adversely affect the safety of future operations, and (b) is a characteristic of an organisation or a system, rather than a characteristic of a specific individual, or characteristic of an operating environment at a specific point in time.
Contributing factors
- The flight crew’s diagnosis of the captain’s failed flight management guidance computer was accurate, but after they did not find the procedure to follow, the failure was not appropriately managed. This resulted in degraded systems capability for the approach.
- The flight crew had a limited understanding of how the captain’s failed flight management guidance computer would affect the use of the aircraft’s automated systems during the instrument landing system approach. This meant that their decision to engage autopilot 1 resulted in the frozen data stored in the failed guidance computer being utilised by the auto flight system, leading to an unexpected increase in engine thrust and prompted the crew to conduct a missed approach.
- The unresolved system failures, combined with the conduct of a missed approach procedure and the subsequent runway change increased the flight crew's workload. This likely reduced their ability to analyse the actual extent to which their automation was degraded, and effectively manage the subsequent approaches.
- During the first runway 06 non-precision approach, the flight crew’s focus of attention was outside the aircraft, attempting to locate the runway. This distraction, along with their unfamiliarity with the approach procedure, inhibited their ability to monitor and maintain the correct flight profile and altitude during the approach. The flight crew did not detect that the aircraft had descended below the segment minimum safe altitude for that stage of the approach.
Other safety factors
- During the flight, multiple dual control inputs occurred, which in other circumstances have resulted in aircraft responding in an unexpected manner.
- The aircraft's flight path profile was not adequately monitored or communicated between the flight crew during the non-precision instrument approaches to runway 06. This reduced the captain’s awareness of any deviation from the prescribed approach and limited his ability to correct it.
- The second runway 06 non-precision instrument approach did not meet the stabilised approach criteria for a short period during the final approach, increasing the safety risk of the landing.
All of the directly involved parties were provided with a draft report and invited to provide submissions. As part of that process, each organisation was asked to communicate what safety actions, if any, they had carried out or were planning to carry out.
Whether or not the ATSB identifies safety issues in the course of an investigation, relevant organisations may proactively initiate safety action in order to reduce their safety risk. The ATSB has been advised of the following proactive safety action in response to this occurrence
As a result of this occurrence, PT Indonesia AirAsia have taken the following proactive safety action:
- Implemented additional classroom sessions on aircraft line-check into the re-training program.
- Incorporated the incident as a subject of the SPOT (Special Orientation Training) in the simulator syllabus.
Sources of information
The sources of information during the investigation included the:
- aircraft operator, PT Indonesia AirAsia
- aircraft flight crew
- provider of air traffic services, Airservices Australia
- manufacturer of the aircraft, Airbus.
References
Dismukes, R.K., and Berman, B. (2010). Checklists and monitoring in the cockpit: Why crucial defences sometimes fail. NASA/TM-2010-216396, NASA Ames Research Centre, Moffett Field, CA.
Kahneman, D. (2011). Thinking, fast and slow. Allen Lane: London, UK.
Klein, G. (2008). Naturalistic decision making. Human Factors, Vol 50, No.3, pp.456-460.
Orlady, H.W., and Orlady, L.M. (1999). Human factors in multi-crew flight operations. Ashgate: Aldershot, UK.
PARC/CAST Flight Deck Automation Working Group. (2013). Operational use of flight path management systems. US Federal Aviation Administration.
Staal, M.A. (2004). Stress, cognition, and human performance: A literature review and conceptual framework. NASA/TM-2004-212824, NASA Ames Research Centre, Moffett Field, CA.
UK Civil Aviation Authority. (2013). Monitoring matters: Guidance on the development of pilot monitoring skills. Loss of Control Action Group, CAA Paper 2013/02, West Sussex, UK.
Wickens, C.D., and Hollands, J.G. (2000). Engineering psychology and human performance (Third edition). Prentice Hall: New Jersey, US.
Submissions
Under Part 4, Division 2 (Investigation Reports), Section 26 of the Transport Safety Investigation Act 2003 (the Act), the Australian Transport Safety Bureau (ATSB) may provide a draft report, on a confidential basis, to any person whom the ATSB considers appropriate. Section 26 (1) (a) of the Act allows a person receiving a draft report to make submissions to the ATSB about the draft report.
A draft of this report was provided to PT Indonesia AirAsia, the aircraft flight crew, Airservices Australia, the Civil Aviation Safety Authority, Airbus and the French Bureau d'Enquêtes et d'Analyses pour la sécurité de l'aviation civile.
Submissions were received from PT Indonesia AirAsia, Airservices Australia, the Civil Aviation Safety Authority, Airbus and the French Bureau d'Enquêtes et d'Analyses pour la sécurité de l'aviation civile. The submissions were reviewed and where considered appropriate, the text of the report was amended accordingly.
Appendix A – Runway 21 ILS approach, aircraft track and flight data
Figure A1: Runway 21 ILS approach with aircraft track (blue)
Source: Naviga (modified by the ATSB)
Figure A2: Flight data showing autopilot and mode selections with a resulting thrust and speed increase during the runway 21 ILS approach. The descent depicted is from 3,000 ft to 2,000 ft.
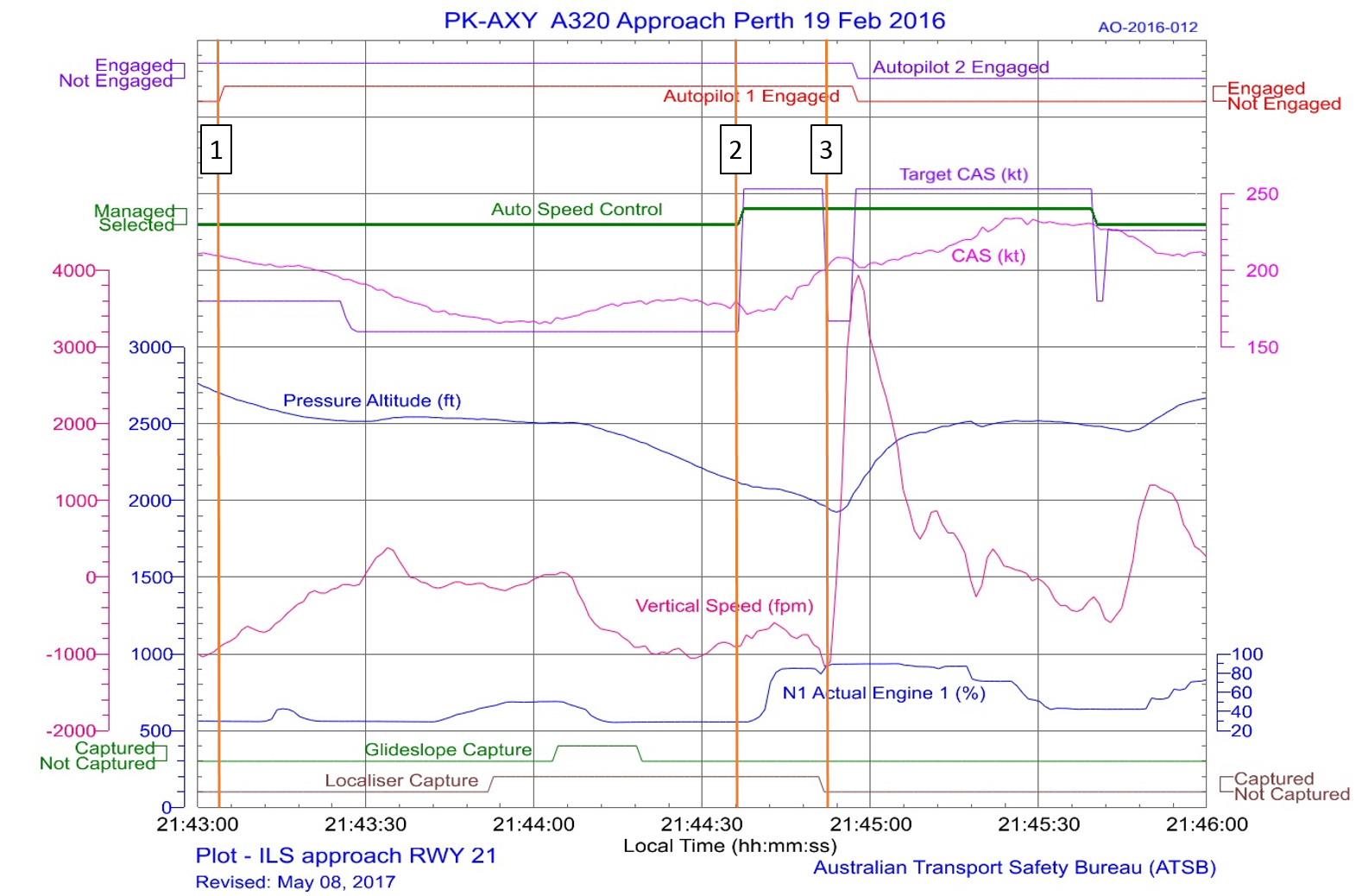
Note:
1. At 2143:04 AP1 was engaged
2. At 2144:37 the auto speed was changed to a managed mode resulting in an increase in the target airspeed (to 253 kt)
3. At 2144:51 the go-around was initiated
Source: ATSB
Appendix B – First runway 06 VOR approach, aircraft track and flight data
Figure B1: First runway 06 VOR approach with aircraft track (blue) and approximate location of go-around (red cross)
Source: Naviga (modified by the ATSB)
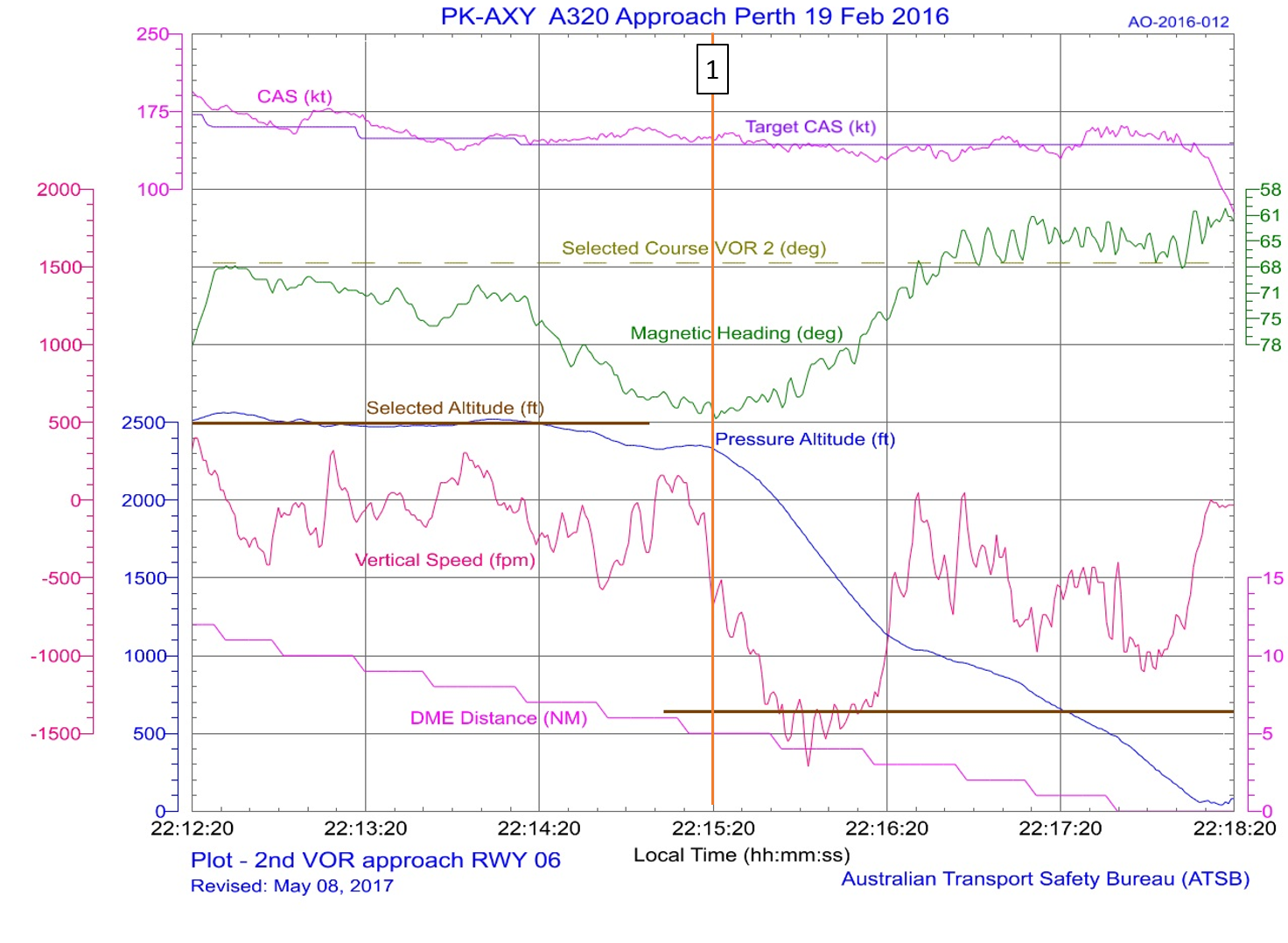
Figure B2: Flight data from first runway 06 VOR approach from 2,500 ft to 1,473 ft
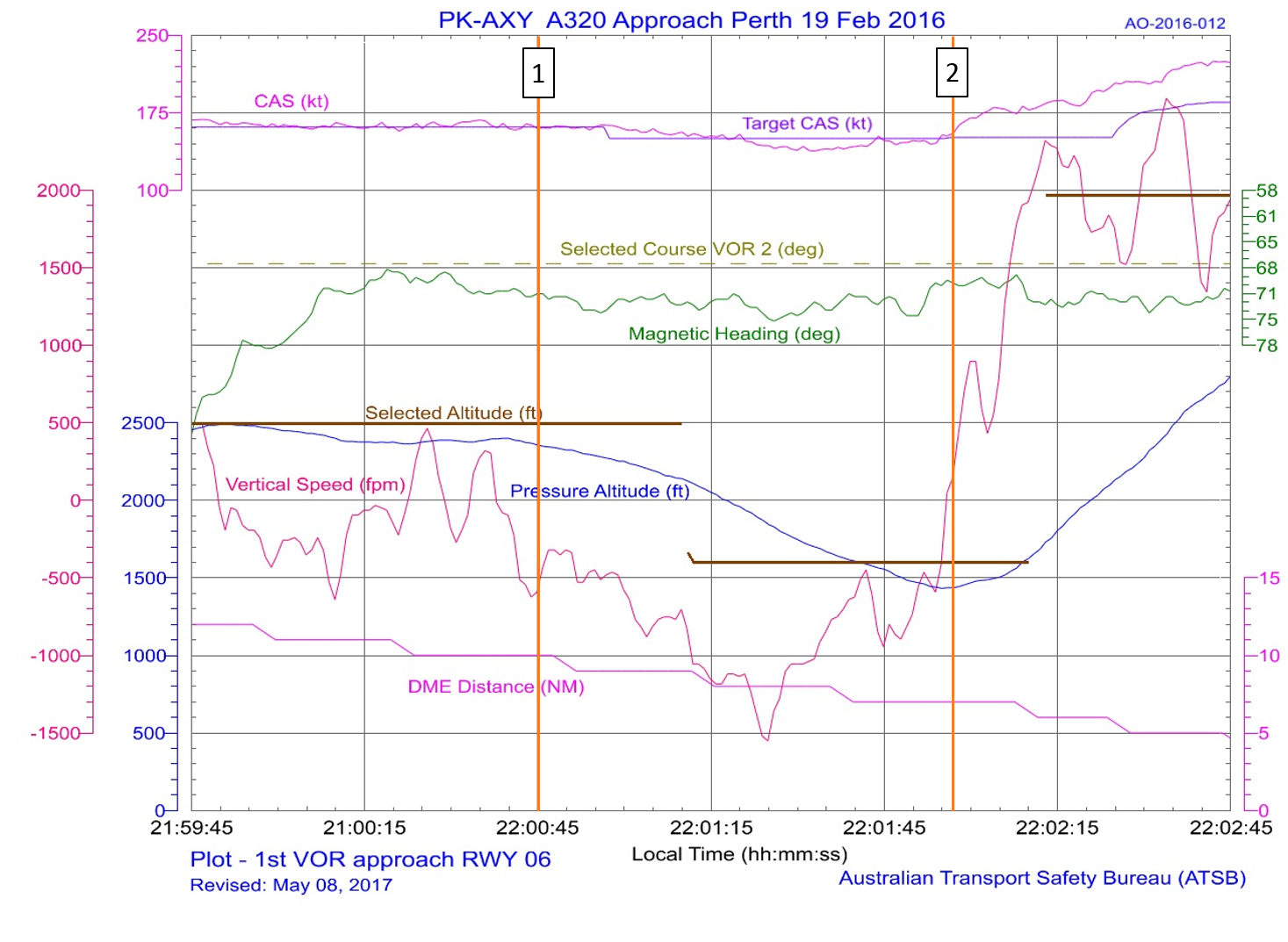
Note:
1. At 2200:45 descent initiated
2. At 2201:57 the go-around was initiated, at an altitude of 1,473 ft
The target CAS is the speed target that would appear on the speed tape of the primary flight display.
Source: ATSB
Appendix C – Second runway 06 VOR approach, aircraft track and flight data
Figure C1: Second runway 06 VOR approach with aircraft track (blue)
Source: Naviga (modified by the ATSB)
Figure C2: Flight data from second runway 06 VOR approach from 2,500 ft to landing
Note:
1. At 2215:20 descent was initiated, at about 5 DME
Source: ATSB
Purpose of safety investigationsThe objective of a safety investigation is to enhance transport safety. This is done through:
It is not a function of the ATSB to apportion blame or provide a means for determining liability. At the same time, an investigation report must include factual material of sufficient weight to support the analysis and findings. At all times the ATSB endeavours to balance the use of material that could imply adverse comment with the need to properly explain what happened, and why, in a fair and unbiased manner. The ATSB does not investigate for the purpose of taking administrative, regulatory or criminal action. TerminologyAn explanation of terminology used in ATSB investigation reports is available here. This includes terms such as occurrence, contributing factor, other factor that increased risk, and safety issue. Publishing informationReleased in accordance with section 25 of the Transport Safety Investigation Act 2003 Published by: Australian Transport Safety Bureau © Commonwealth of Australia 2018
Ownership of intellectual property rights in this publication Unless otherwise noted, copyright (and any other intellectual property rights, if any) in this report publication is owned by the Commonwealth of Australia. Creative Commons licence With the exception of the Coat of Arms, ATSB logo, and photos and graphics in which a third party holds copyright, this publication is licensed under a Creative Commons Attribution 3.0 Australia licence. Creative Commons Attribution 3.0 Australia Licence is a standard form licence agreement that allows you to copy, distribute, transmit and adapt this publication provided that you attribute the work. The ATSB’s preference is that you attribute this publication (and any material sourced from it) using the following wording: Source: Australian Transport Safety Bureau Copyright in material obtained from other agencies, private individuals or organisations, belongs to those agencies, individuals or organisations. Where you wish to use their material, you will need to contact them directly. |