Executive summary
What happened
On the morning of 19 January 2021, the general cargo ship Trinity Bay (cover photo) grounded on Harrington Shoal in the Great Barrier Reef Marine Park mandatory pilotage area while on passage from Thursday Island in the Torres Strait to Cairns, Queensland. The ship sustained minor hull damage with no reported injuries or oil pollution. The ship was subsequently refloated on the rising tide and following an underwater inspection and change of key bridge personnel, resumed its passage to Cairns, arriving on 22 January.
What the ATSB found
The ATSB found that in attempting to address a non-conformance identified in an internal audit, a draft passage planning tool being trialled for use across the fleet was used to plan the ship’s passage from Thursday Island to Cairns. Errors in the planning tool’s waypoints resulted in the route being planned over Harrington Shoal, a potential navigational danger.
The ATSB also identified that the passage was not effectively planned or monitored. The passage planning process did not comply with the operator’s safety management system requirements to plan and check the route using the primary means of navigation (paper charts) or to conduct an independent verification of the route. Consequently, the dangers on the planned route were not identified and the monitoring of the ship’s passage was also ineffective in identifying these dangers.
Additionally, the ATSB found that at the time of the occurrence, the REEFVTS surveillance and monitoring system was subject to a known and reported fault, which resulted in abnormally high numbers of spurious alerts. Consequently, REEFVTS operators, including the operator on duty at the time of the grounding, were experiencing sustained periods of elevated workload, and alerts warning of Trinity Bay’s impending grounding, were acknowledged but not acted upon.
What has been done as a result
Sea Swift advised the ATSB that Trinity Bay’s electronic chart system program was removed from service and that it was investigating options for fully compliant electronic chart display and information systems for its ships. Additionally, a mentoring and audit program was implemented across the Queensland fleet to ensure crew understanding and effective implementation of the operator’s safety management system requirements for passage planning and navigation.
Safety message
The development and use of a detailed passage plan in accordance with the accepted principles of passage planning, including a thorough appraisal, with the route laid out and independently checked on the ship’s primary means of navigation, and effectively monitored when executed, remains essential to ensuring the safety of navigation.
The occurrence
Overview
On the morning of 19 January 2021, the general cargo ship Trinity Bay (cover photo) grounded on Harrington Shoal in the Great Barrier Reef Marine Park mandatory pilotage area while on passage from Thursday Island in the Torres Strait to Cairns, Queensland. The ship sustained minor hull damage with no reported injuries or oil pollution. The ship was subsequently refloated on the rising tide and following an underwater inspection and change of key bridge personnel, resumed its passage to Cairns, arriving on 22 January.
Crew handover
On 1 January 2021, Trinity Bay was alongside in Cairns, Queensland, (Figure 1) undergoing a routine crew change prior to commencing a 4-week roster transporting cargo between Cairns, Horn Island, Weipa, and Thursday Island. During the 4-week roster the crew generally undertook 4 return voyages[1] and later that afternoon, the ship departed Cairns for Horn Island on the first voyage.
Figure 1: Section of chart Aus 4620 showing Trinity Bay’s ports of call
Source: Australian Hydrographic Office, annotated by the ATSB
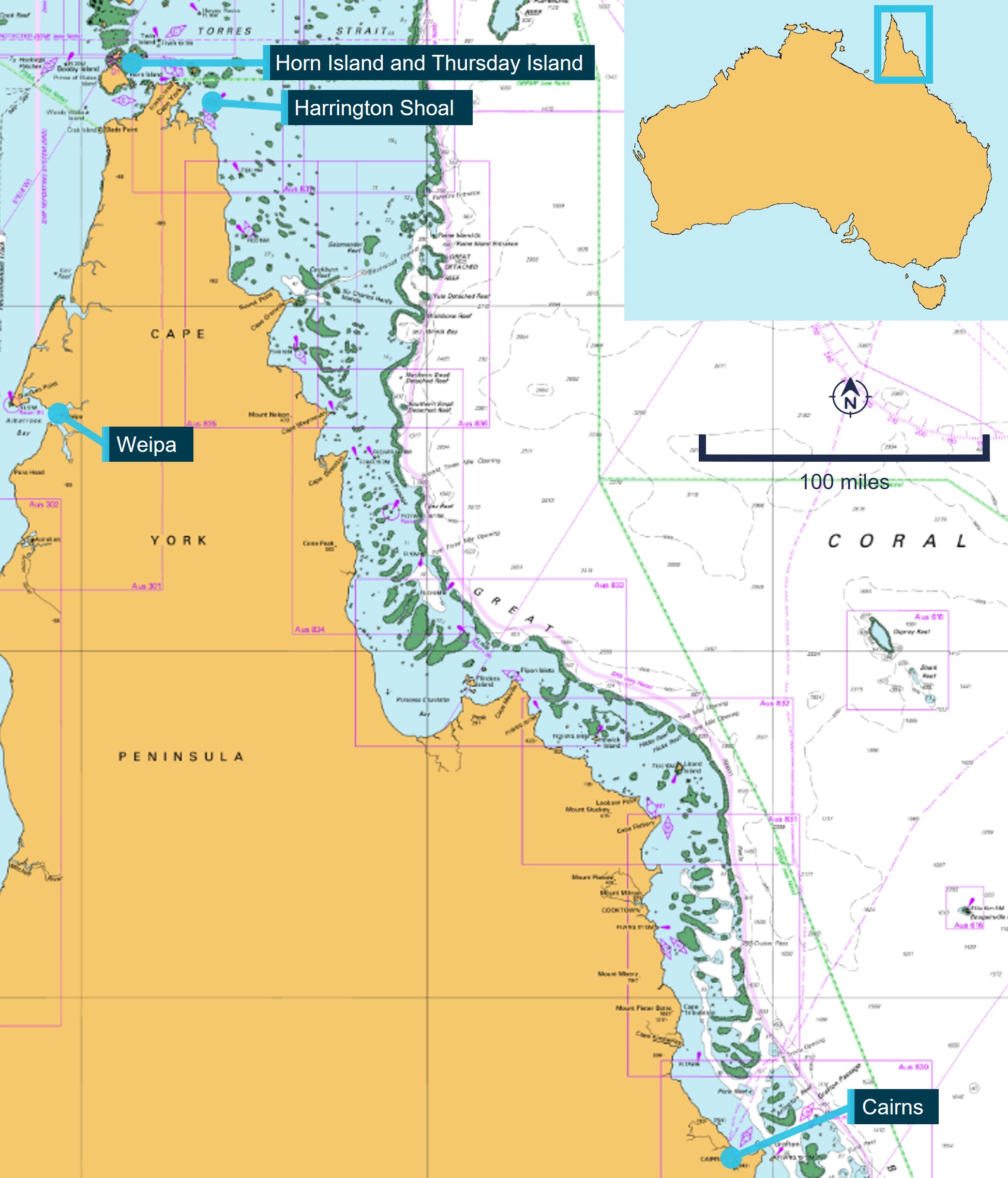
On 12 January, Trinity Bay departed Thursday Island for Cairns to complete the second return voyage using a route plan that had been regularly used over the previous 10 years. This original route was marked on the ship’s paper charts[2] in permanent red ink (Figure 2) and was also saved and displayed on the ship’s TRANSAS electronic chart system (ECS) program.[3] On this occasion, the master also directed the ship’s watchkeeping officers to evaluate a newly created route plan for the passage by comparing the proposed new route’s waypoints and courses (printed on paper) with those of the ship’s original route being executed.
By 1800 local time on 13 January, Trinity Bay was alongside in Cairns following an uneventful passage. The ship’s officers did not identify any significant concerns with the newly created route.
Figure 2: Section of Trinity Bay's chart Aus 839 showing original routes
Source: Sea Swift, annotated by the ATSB
New passage plans
While in Cairns, the ship’s crew were occupied with cargo operations, bunkering, and planned maintenance. In preparation for the next voyage, the master loaded the newly created‑ northbound routes into the ship’s ECS but did not plot them onto the paper charts, which retained the original routes in red ink (Figure 2). At 1340 on 15 January, Trinity Bay departed Cairns for Horn Island on the third return voyage. The master’s night orders[4] stated that the new routes displayed on the ECS would not align with the original routes marked on the paper chart and that watchkeepers were to follow the new routes displayed on the ECS. The northbound passages proceeded without incident and the ship arrived in Weipa at 0020 on 18 January.
While alongside in Weipa, the master loaded the new southbound routes into the ECS in preparation for the return to Cairns. Once again, the new waypoints and routes were not plotted onto the ship’s paper charts. The ship then departed Weipa for Thursday Island, arriving at 0200 on 19 January.
Passage and grounding
Departure from Thursday Island
At 0500 on 19 January, Trinity Bay departed Thursday Island bound for Cairns using one of the newly created‑ southbound routes. By about 0530, Trinity Bay had exited port limits and entered the Great Barrier Reef and Torres Strait vessel traffic service (REEFVTS)[5] monitoring area. The ship’s entry was verbally reported by the ship’s crew to REEFVTS over very high frequency (VHF) radio in accordance with REEFVTS reporting requirements.
The master was on watch at the time of departure while the remaining crew secured the ship for sea. At about 0545, the chief mate took over as officer of the watch (OOW). The ship was on autopilot, on a heading[6] of 116° at about 11.7 knots,[7] with draughts of 3.2 m forward and 3.8 m aft. The morning was partly cloudy with visibility recorded as 6 nautical miles (miles),[8] with light winds and calm seas.
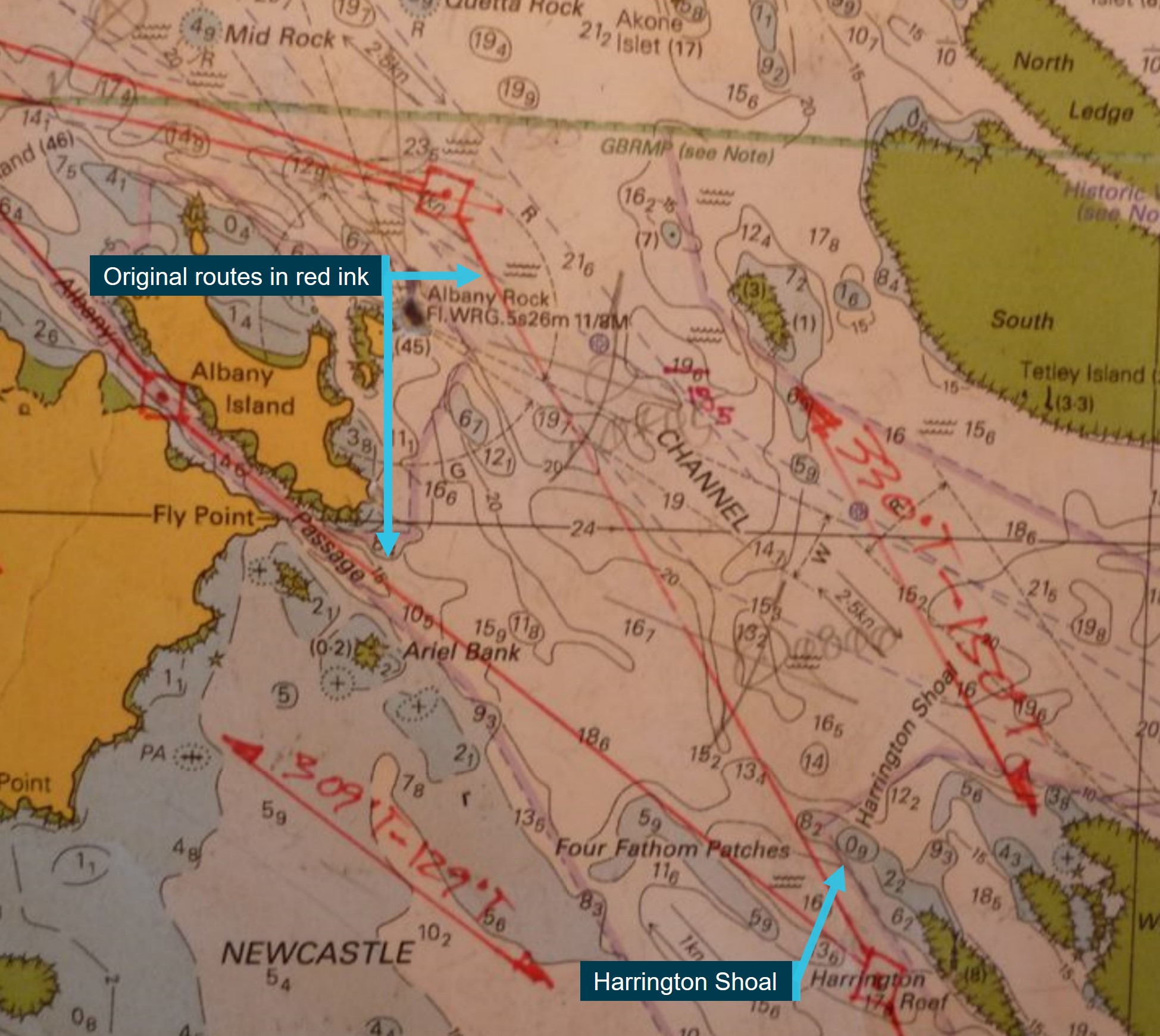
At 0545, the duty REEFVTS operator sent Trinity Bay ship encounter information (SEI)[9] via Inmarsat-C.[10] Between 0600 and 0800, the OOW made hourly entries into the bridge logbook recording the ships heading, speed, gyrocompass error, weather observations, and sea state details. They also plotted radar position fixes on the paper chart at 15 minute intervals while also monitoring the ship’s progress against the new route on the ECS. As the new route was not marked on the paper chart, the OOW’s radar fixes did not align with the original route marked in red pen (Figure 3). However, the OOW expected this (as noted in the master’s night orders) and they assessed that the passage was progressing safely with the ship on the planned track as displayed on the ECS.
At about 0715, the OOW fixed the ship’s position on the paper chart. A few minutes later, the ship passed Mid Rock, a charted rock with a depth of 4.9 m, at a distance of about 0.18 miles. This did not elicit any concern from the OOW, and the ship continued on its planned track.
At 0736, the OOW altered course in accordance with the new passage plan and route displayed on the ECS. Following the course alteration, they noted that the parallel index[11] listed in the passage plan document for the new leg (148° and 0.46 miles off Albany Rock) was incorrect and did not correspond to the planned route. Despite that, the OOW kept the ship on the route displayed on the ECS and continued with the passage.
At 0745, the OOW plotted a radar fix on the paper chart. At about the same time, they sighted Harrington Reef west cardinal mark[12] off the ship’s port bow noting that it appeared closer than they were accustomed to when using the original southbound route. They went back to the radar to verify their fix and checked the ship’s track on the ECS. The OOW noted that the planned route on the ECS was laid west of Harrington Reef cardinal mark and assessed that the passage was proceeding as planned (Figure 3).
Figure 3: Section of Aus chart 839 used on board Trinity Bay
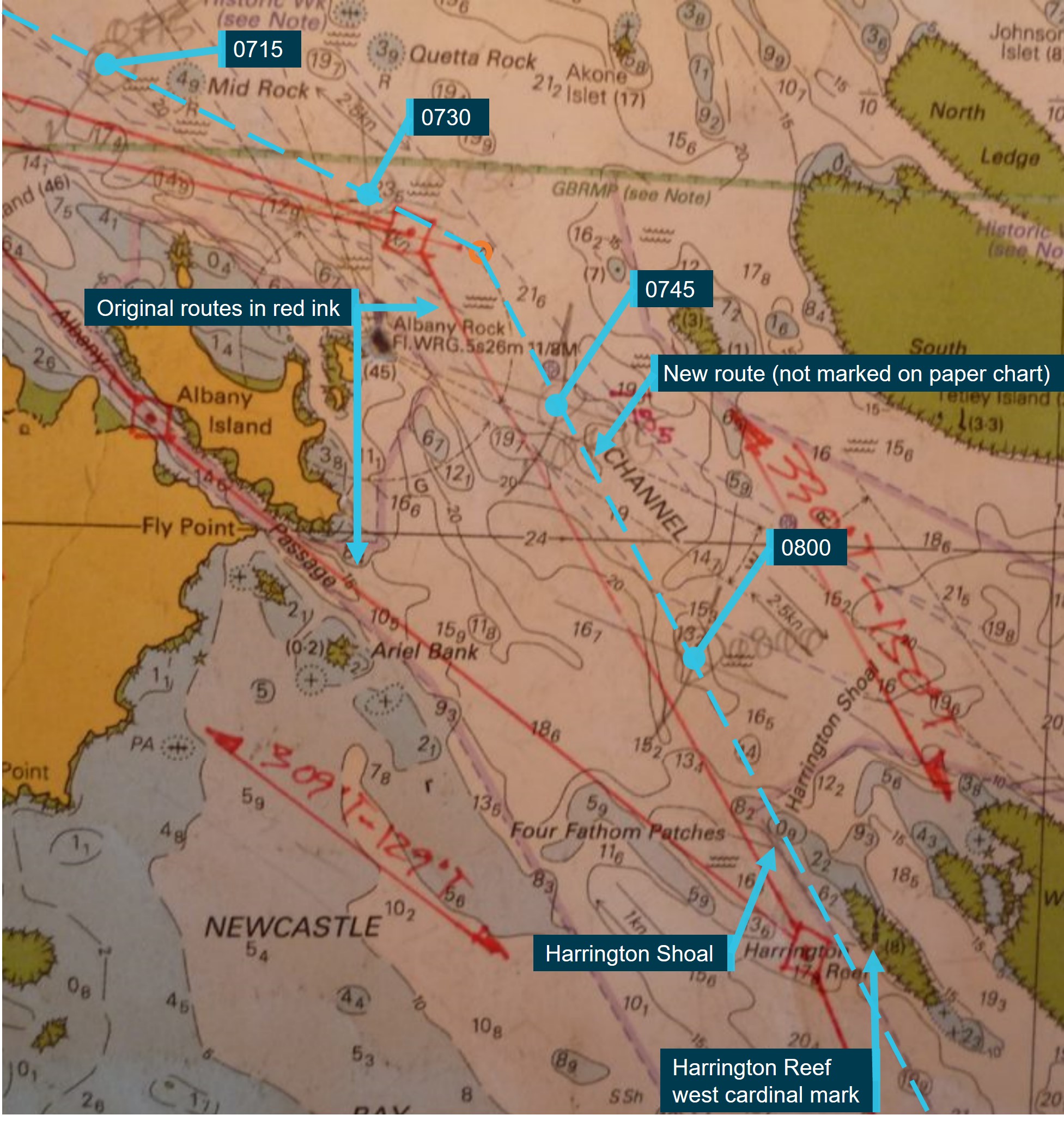
Image of a section of paper chart Aus 839 used on board at the time of the grounding showing original passage plans marked in red ink and radar fixes made by the OOW leading up to the grounding.
Source: Sea Swift, annotated by the ATSB
At 0800, the OOW plotted another radar fix on the paper chart and visually confirmed that the Harrington Reef west cardinal mark remained on the ship’s port side (Figure 3). They verified the radar fix again and then checked the depth sounder, which indicated a depth of 17.5 m. They noted that the paper chart indicated a similar depth, and once again assessed that there was no cause for concern.
The grounding
At about 0810, the OOW noticed the ship’s bow swing sharply to port. In response, they immediately switched to manual steering and placed the wheel hard-to-starboard. As the bow continued to swing to port, the OOW checked the radar and saw that the ship’s speed had reduced from about 12.1 knots to 7.3 knots and that the depth sounder indicated a depth of about 0.63 m. As the ship’s speed continued to decrease rapidly, the OOW realised that the ship was aground (Figure 4). In response, they brought the main engine telegraph to stop and called the master on the ship’s telephone.
Figure 4: Section of chart Aus 839 showing Trinity Bay’s track

Trinity Bay’s automatic identification system (AIS) data overlaid onto chart Aus 839.
Source: Australian Hydrographic Office, modified and annotated by the ATSB using electronically recorded data
Shipboard response
The master, who had awoken on hearing the ship’s engine pitch change, immediately went to the bridge. The master checked the ECS which showed that the ship was aground on Harrington Shoal, a charted feature with a depth of 0.9 m situated north-west of Harrington Reef (Figure 4). The master also noted that the ECS showed the route leg passing directly across Harrington Shoal. The master then checked the paper chart which confirmed that the ship’s track, projected forward from the OOW’s last two position fixes, passed directly over Harrington Shoal.
The master established that there was no immediate danger to the ship and that there were no visible signs of damage or pollution.[13] The ship’s bow appeared to be clear of the shoal which was composed mostly of sand.
The master asked the chief engineer to commence deballasting[14] and called the ship’s designated person ashore (DPA)[15] to advise them of the grounding. At the request of the DPA, the master sounded the ship’s tanks to confirm the integrity of the hull and sounded the surrounding waters to establish depths around the ship. The DPA also instructed the master to notify REEFVTS of the situation while they notified the Australian Maritime Safety Authority (AMSA).
At 0822, the master called the duty REEFVTS operator using a mobile phone and informed them that Trinity Bay was aground on Harrington Shoal. The REEFVTS operator, who was unaware of the grounding, notified their supervisor and the regional harbour master for Cairns.
At about 0950, the second mate, positioned at the bow, advised the master that the ship appeared to be moving with the rising tide. The master used the bow thruster to confirm that the bow was moving freely and then engaged astern propulsion (about 25% of available RPM), which resulted in the ship moving astern.
The ship continued to make sternway off the shoal while the master used the bow thruster to control the ship’s head and, by 1010, Trinity Bay was clear of Harrington Shoal. At about 1035 the master anchored the ship about 2 miles to the south-south-west of the shoal, just inside the western boundary of the designated shipping area (DSA).[16]
AMSA subsequently instructed the ship manager to ensure the ship remained at anchor until a hull inspection had been completed. Trinity Bay remained at anchor overnight while the crew undertook regular soundings of the ship’s accessible double bottom and wing tanks to confirm there was no water ingress.
Hull assessment and return to Cairns
At 0710 on 20 January, a commercial dive crew arrived at the ship. An underwater inspection of the ship’s hull identified minor paint damage amidships leading aft and a fresh dent amidships on the port side. Paint was stripped on the bottom of the hull through to the end of the skeg, but the propeller and rudder were undamaged. Some dents were noted on the port bilge keel, but no cracks were detected.
At about 1230, the ship’s marine manager and marine superintendent arrived at the ship by water taxi from Horn Island after flying up from Cairns earlier that morning. The master and chief mate were stood down and the marine superintendent took over duties as master.
The marine manager quarantined the charts onboard and replaced them with a fresh set of charts with a pre-prepared passage plan for a voyage to Cairns. The replacement master completed a new passage plan document incorporating the pre-prepared passage plan and sought AMSA approval for its use.
AMSA issued a prohibition notice[17] prohibiting the use of the TRANSAS ECS for navigation. As a result, the marine manager shut down the ECS and posted a notice on the bridge advising crew of its removal from service. AMSA subsequently permitted Trinity Bay to continue the voyage subject to conditions, including the provision of status updates and damage assessments every 12 hours.
At 1829, the replacement master advised REEFVTS they had clearance to resume the voyage. At 1835, the ship weighed anchor and resumed passage for Cairns, arriving at 0645 on 22 January.
Context
Trinity Bay
Trinity Bay is an 81 m,[18] general cargo vessel, built in Koje, South Korea in 1996. At the time of the grounding, the ship was owned and operated by Sea Swift as a coastal freighter operating a weekly service supplying communities around the Cape York Peninsula and Torres Strait. Trinity Bay was a domestic commercial vessel (DCV) certified by the Australian Maritime Safety Authority (AMSA) for operations in service categories 1C[19] and 2B.[20] Although certified to carry passengers,[21] the ship was primarily used to transport general cargo.
Equipment and machinery
The ship was equipped with the necessary navigational and safety equipment for a vessel of its service categories under the relevant DCV regulations and marine orders.[22]
The ship’s navigation equipment included:
- official paper nautical charts
- a radar
- an automatic identification system (AIS)
- gyrocompass
- differential global positioning systems (DGPS)[23]
- a bridge navigational watch alarm system (BNWAS)
- a TRANSAS Navigator electronic chart system (ECS) program installed on a computer[24]
The ship’s propulsion was provided by a Caterpillar 3606 engine delivering 1492 kw at 900 rpm with a service speed of 13.5 knots. The ship was not equipped with a voyage data recorder (VDR),[25] nor was it required to be.
Charts
The regulations required that Trinity Bay carry adequate and up-to-date official nautical charts for the intended voyage. At the time of the grounding, the ship’s primary means of navigation (being used to meet the chart carriage requirements of the regulations) was official paper nautical charts issued by the Australian Hydrographic Office (AHO).
Electronic chart system (ECS)
In addition to the paper charts, Trinity Bay was equipped with a TRANSAS Navigator electronic chart system (ECS) program installed on a computer on the bridge. An ECS is a navigation information system that electronically displays vessel position and relevant nautical chart data from a database, but does not meet the International Maritime Organization (IMO) requirements for an electronic chart display and information system (ECDIS).
Trinity Bay’s ECS program (called a ‘chart plotter’ by the crew) did not use official electronic navigation charts (ENCs) and could not be used to meet the chart carriage requirements of the regulations.[26] The software and hardware were not type approved to meet the functional requirements for ECDIS and the ECS was also not capable of performing automated route safety function checks or look‑ahead safety function checks. The ECS was listed as a navigational aid in the ship’s passage plan documents, in the operator’s fleet memos and in the safety management system (SMS), which stated:
Advantage is to be taken of all the navigational equipment with which the vessel is fitted however, electronic navigational equipment is to be utilised as navigational aids only and must not be solely relied upon.
Furthermore, in September 2020, Sea Swift issued a fleet memo reminding crews that the ECS was not an approved ECDIS, and that navigation was to be conducted on up-to-date paper charts.
Crew
Trinity Bay was crewed by 9 crew as required by the vessel’s SMS and the ship’s certificate of operation. The ship’s complement comprised 4 deck crew, 3 deck watchkeeping officers (a master and 2 mates) and 2 engineers (a chief engineer and second engineer). The ship’s crew operated on a 4-week roster, and most had sailed together on the ship for several years.
The master had about 42 years of seagoing experience and held a valid Australian master’s certificate of competency (Master <80m NC). [27] The master had 30 years of experience in command of vessels operating in the Great Barrier Reef, of which 13 years was on Trinity Bay. The master was also approved to act as master of vessels (including Trinity Bay) that were exempt from the Torres Strait and Great Barrier Reef compulsory pilotage requirements. As master of Trinity Bay, they generally completed 48 transits of the inner route and Torres Strait pilotage areas annually.
The chief mate had about 11 years of seagoing experience and held a valid Australian chief mate’s certificate of competency (Mate <80m NC)[28] acquired in December 2018. The chief mate commenced employment with Sea Swift in late 2017 as a deckhand and was promoted to second mate shortly after obtaining their mate’s qualifications. They were subsequently promoted to chief mate and had about 12 months’ experience in the rank. The chief mate was approved to act as a navigational watchkeeper on vessels exempt from the compulsory pilotage requirements.
Operations
During a typical 4-week roster, the crew would generally undertake 4 return voyages, routinely departing Cairns on a Friday afternoon, calling at Horn Island, Weipa and Thursday Island before returning to Cairns the following Wednesday.
Trinity Bay had been operating to the same ports of call for about 10 years utilising the same routes that were marked in permanent red ink on paper charts (Figure 2) and saved on the ECS. Both northbound and southbound routes between Cairns and Thursday Island were generally laid outside of the two-way route between the mainland and Harrington Reef, to avoid larger shipping traffic.
Bridge watchkeeping
Trinity Bay’s deck officers maintained a traditional 4-on 8-off watchkeeping schedule at sea although the master tended to keep watch for the first 6 hours after departure and the last 6 hours before arrival at ports to ensure rest hour requirements were complied with. During daylight hours, the officer of the watch (OOW) was the sole watchkeeper with an additional lookout (usually a deckhand) posted in hours of darkness. The vessel maintained a fatigue management log and recorded crew hours of rest in accordance with the vessel’s certificate of operation and STCW guidelines. Based on the available evidence, it was considered unlikely that levels of fatigue likely to influence performance were experienced by either the master (during the passage planning) or by the OOW (at the time of the grounding).
Safety management system
Trinity Bay operated under Sea Swift’s safety management system (SMS) as required by the relevant marine orders,[29] and the International Safety Management (ISM) Code.[30] The SMS included procedures for voyage planning, internal audits and management of change, among others.
Passage planning
Trinity Bay’s SMS procedures for passage planning reflected the general principles and guidance in SOLAS[31] and the IMO’s Guidelines for voyage planning.[32] The SMS stated that the purpose of voyage planning was:
To plan and display the vessel’s passage for the intended voyage berth to berth, to monitor and verify the vessel’s position throughout the voyage in relation to reported dangers to the safe navigation of the vessel.
IMO guidelines stated that the development of a passage plan and the close and continuous monitoring of the vessel's progress and position during the execution of such a plan, was essential for the safety of life at sea and protection of the marine environment. The guidelines directed masters and watchkeepers to ensure there was systematic bridge organisation that provided for cross-checking of individual human decisions so that errors could be detected and corrected as early as possible.[33]
Trinity Bay’s SMS included a standard work instruction (SWI) that outlined the procedures for passage planning. The SWI required that, prior to commencing a voyage, a documented passage plan was developed, printed out, signed by the master and watchkeepers, and retained on the bridge for use during the voyage. The second mate was the designated navigation officer on board Trinity Bay with responsibility for passage planning while the master was responsible for oversight and approval. In practice, the second mate was generally occupied with cargo operations with the master consequently assuming responsibility for passage planning. The second mate retained other navigational responsibilities such as chart corrections and publication updates.
The SWI also required that only routes approved by the designated person ashore (DPA) were to be used when passage planning and that any deviations from the approved route (other than for collision avoidance) had to likewise be approved by the DPA.
Crews operating vessels in Queensland used several different passage planning tools based on their individual preferences including ones based on Microsoft Word documents and an Excel workbook. Following a review of tools in use across the Queensland fleet, Sea Swift shore management identified the Excel workbook as being the most suitable to form the basis of a standardised set of passage plans. The operator decided that a draft of the Excel workbook would be trialled on a ship (Biquele Bay) and would subsequently be introduced across the fleet as a standardised passage planning tool. Sea Swift reported that, at the time of the grounding, the Excel workbook was still being trialled and that there had been no official direction or advice to commence using the passage planning spreadsheet more widely.
Internal audits
The SMS included an internal audit process to verify the ship’s compliance with the SMS.
On 7 October 2020, an internal audit of Trinity Bay conducted by the ship’s marine manager identified several non-conformances related to the navigation requirements of the SMS. The audit recorded a non-conformance which stated that the ship’s passage plans were not in accordance with the passage planning SWI. Other identified non-conformances related to position fixing on charts, chart corrections and use of appropriate charts. The master at the time (the master on board at the time of the grounding) rectified some of the non-conformances and logged intended safety action for others.
Shortly after the audit, the master completed their 4-week roster, signed off, and then signed on again about 4 weeks later. About 2 weeks after their return, on 20 November, the ship’s marine manager sent the master a reminder to close out the safety action on the passage planning non‑conformance noting that there had been sufficient time for the ship ‘…to get the passage plan up to standard’. In response, the master decided to obtain and use what they believed to be a passage planning tool containing approved waypoints and routes to develop new passage plans.
The master requested and received copies of the draft Excel workbooks they knew were being trialled on board Biquele Bay and used these to construct new routes and to compile new passage plans (see the section titled Trinity Bay’s passage plans).
Risk and change management
The SMS also provided guidance for risk and change management to control change within the organisation and its business. The change management procedures sought to reduce the health, safety, environmental and quality (HSEQ) hazards that could occur as a result of change, to control the occurrence of HSEQ events, to manage the way change was introduced and to maintain a high level of HSEQ competence.
The SMS procedures and guidance for the risks related to the management of change were not applied to the planned introduction of standardised passage plans and the operator did not consider them to be appropriate or useful in the circumstances.
Trinity Bay’s passage plans
Trinity Bay’s original routes and passage plans had been used without incident for at least the preceding 10 years. The ship’s passage plans had remained largely unchanged during that time with only minor amendments made to accommodate new ports or irregular port calls. The SMS divided passage planning into 4 stages: appraisal, planning, execution, and monitoring.
Appraisal
Trinity Bay’s SMS required that an overall assessment of the voyage be made by the master, in consultation with the planning officer and other deck officers, after all relevant information had been gathered. The passage plan document included a checklist of items to be considered, publications to be referenced and general navigation checks to be performed as part of the appraisal process. However, the appraisal for the new route from Thursday Island to Cairns relied almost exclusively on the master’s knowledge and past experience operating in the region and their belief that the waypoints in the workbook were safe and DPA-approved. Publications such as the sailing directions were not referenced for the new route, nor were other deck officers consulted.
Planning
The SMS stated that once a full appraisal had been carried out, a detailed plan was to be developed. The plan was to cover the whole voyage, from berth to berth, in accordance with the procedures in the SMS. In particular, the procedure required the master to ensure that only official nautical charts and publications were used for navigational purposes.
On 20 November 2020, following the reminder from the marine manager to address the non‑conformance, the master of Trinity Bay emailed the master trialling the workbook and requested a copy of the ‘…updated and latest passage plan from Cairns to Horn Island return.’. The master subsequently received two draft Excel workbooks named ‘Passage Plan CNS‑HI’ and ‘Passage Plan HI‑CNS’. The master trialling the draft workbook stated they had sailed the routes the previous week and that they were planned using the ‘Waypoints master list’ embedded in the workbooks (bottom tab in Figure 5). Following receipt of the draft passage planning workbooks, Trinity Bay’s master recalled that they spent about 30 hours developing 6 new passage plans for Trinity Bay’s regular voyages.
On 4 December, the master signed off once again and, in handover notes to the relieving master, stated that they had ‘…made up our new passage plans in the new Master Waypoint Spreadsheet format that management want us to use...’. In January 2021, following their return to the ship, the master loaded the newly developed routes into the ECS and subsequently used them.
Trinity Bay’s new routes
The draft workbooks consisted of a ‘COVER PAGE’, a ‘WAYPOINTS MASTER LIST, a ‘PASSAGE CALCULATION SHEET’ and a ‘PASSAGE PLAN FORM’. The ‘WAYPOINTS MASTER LIST’ consisted of named and numbered waypoints organised in sequence forming route segments (Figure 5).
Figure 5: Excel workbook ‘Passage Plan CNS‑HI’
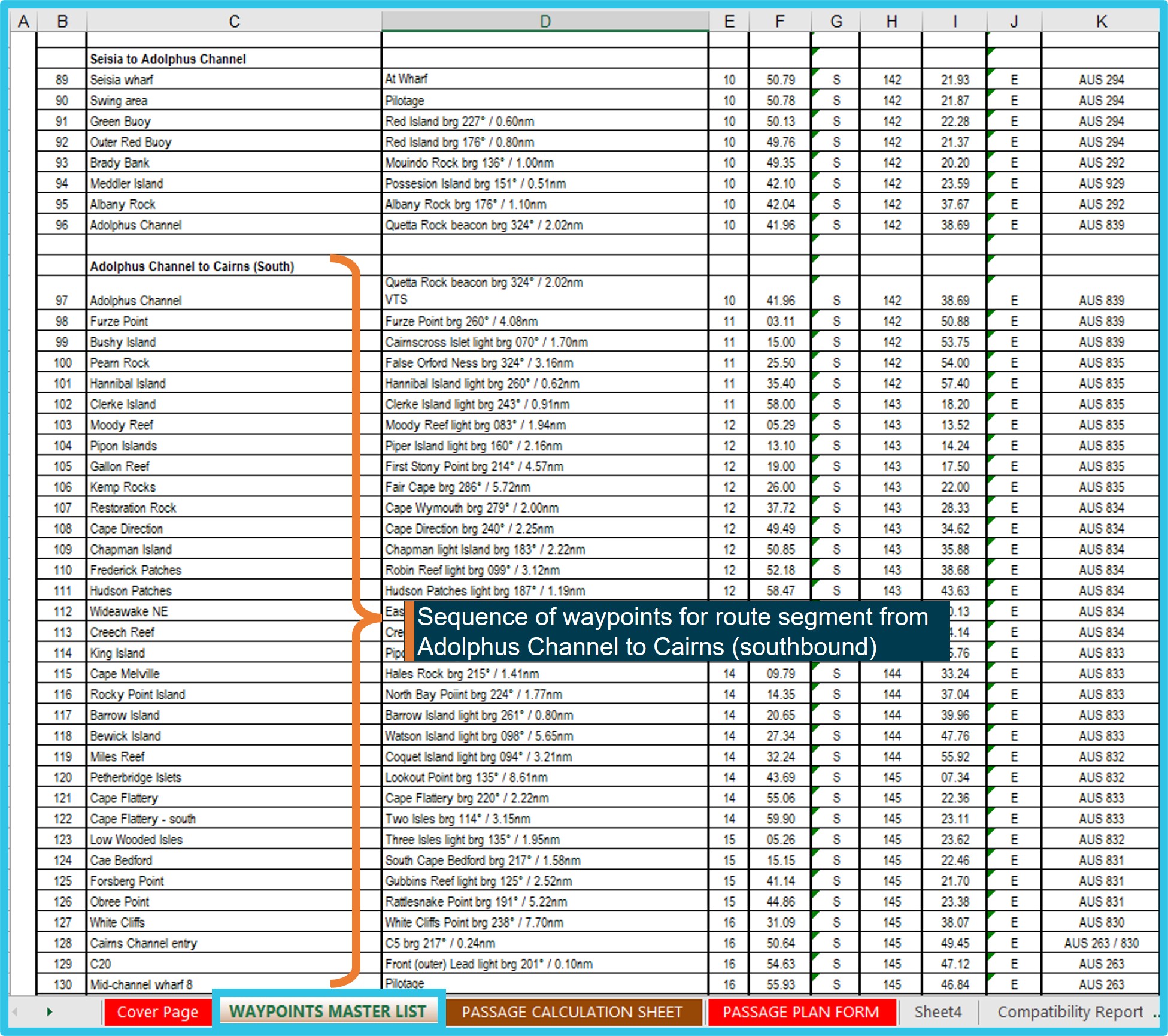
Image of the passage planning spreadsheet detailing route segments and their associated waypoints, and coordinates.
Source: Sea Swift, annotated by the ATSB
Routes were constructed by selecting the relevant waypoints (or sequences of waypoints) from the ‘WAYPOINTS MASTER LIST’ tab (column B in Figure 5) and entering the waypoint numbers in sequence in the ‘PASSAGE CALCULATION SHEET’ tab. This resulted in the respective coordinates of each waypoint being populated in the ‘PASSAGE CALCULATION SHEET’ and functions embedded in the workbook calculated the distances and courses to steer for the various legs defined by the selected waypoints.
The waypoints, coordinates, distances and courses were also populated automatically in the ‘PASSAGE PLAN FORM’ tab, which was then printed off, signed, and retained on the bridge as part of the passage plan document. The ‘PASSAGE PLAN FORM’ tab also included a column called ‘PASSAGE PLAN NOTES’ where additional useful information such as details for parallel index lines could be entered. This column was not populated automatically and needed to be completed by the officer compiling the passage plan.
Trinity Bay’s master used the ‘Passage Plan CNS‑HI’ workbook (Figure 5), to construct the new route from Thursday Island to Cairns. Part of this route included a segment from Adolphus Channel to Cairns and the master utilised the waypoints listed for this segment directly from the ‘WAYPOINTS MASTER LIST’. This included a leg from waypoint 97 (Adolphus Channel) to waypoint 98 (Furze Point) which passed directly over Harrington Shoal (Figure 6). Additionally, the route planned using these waypoints also resulted in the preceding leg being laid across Mid Rock, a charted underwater rock.
Figure 6: Section of chart Aus 839 showing new route legs
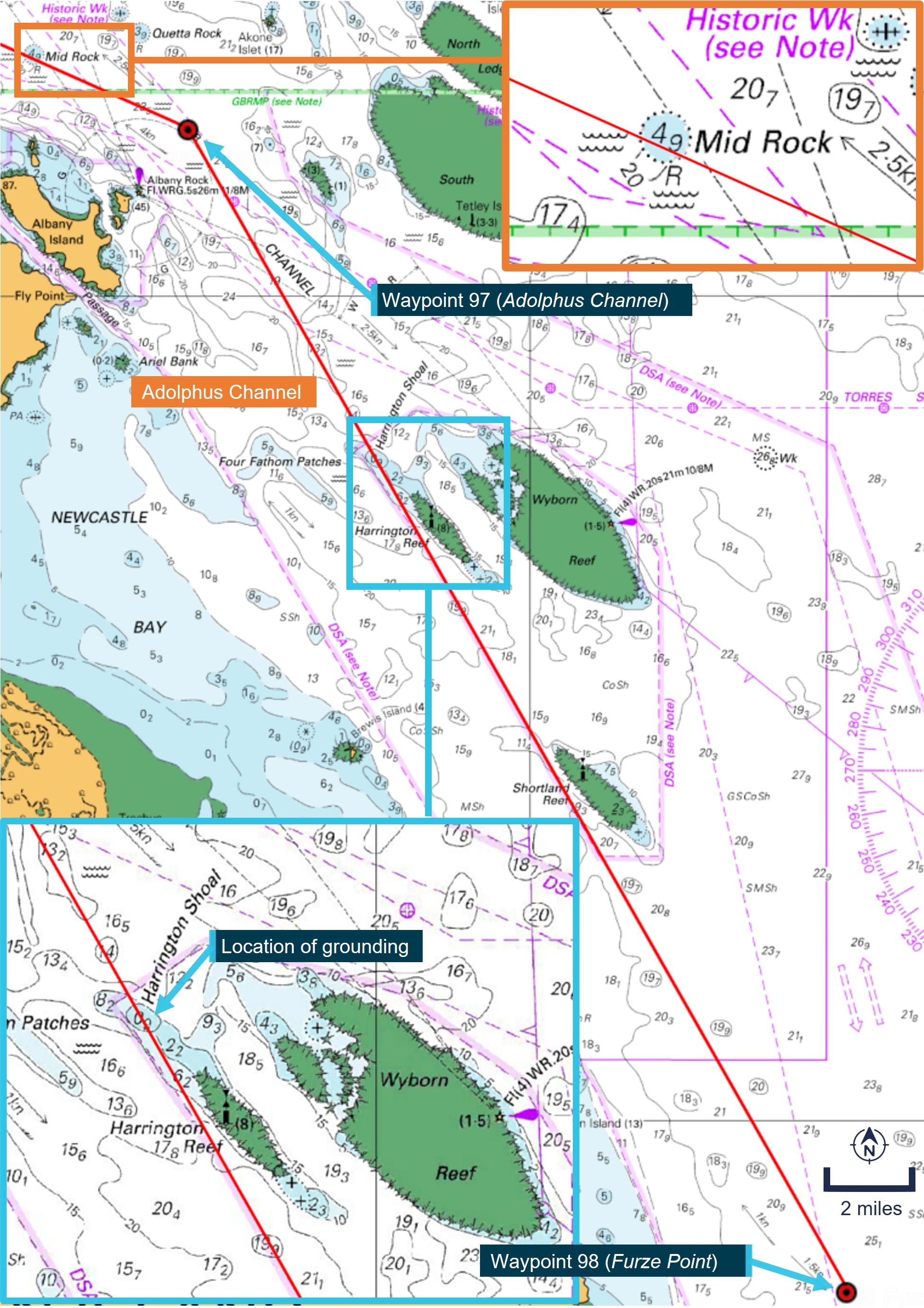
Source: Australian Hydrographic Office, annotated by the ATSB
Navigation on ECS
The planning phase also included plotting the intended route onto appropriate charts and visually checking that every leg of the planned route was in safe water and clear of navigational dangers.
Once the new routes were planned, the master manually entered the waypoints directly into the ship’s ECS computer. The master stated that when entering the waypoints into the ECS, they visually checked that each waypoint was in safe water. They did not check the legs connecting the various waypoints and did not identify that the route leg connecting waypoint 97 to waypoint 98 passed directly over Harrington Shoal (Figure 7).
The newly created waypoints and route was not marked on paper charts, which were the ship’s primary means of navigation. There was also no independent verification of the route by another deck officer, nor was there a briefing for watchkeepers before commencing the voyage.
Figure 7: Image of Trinity Bay’s ECS screen
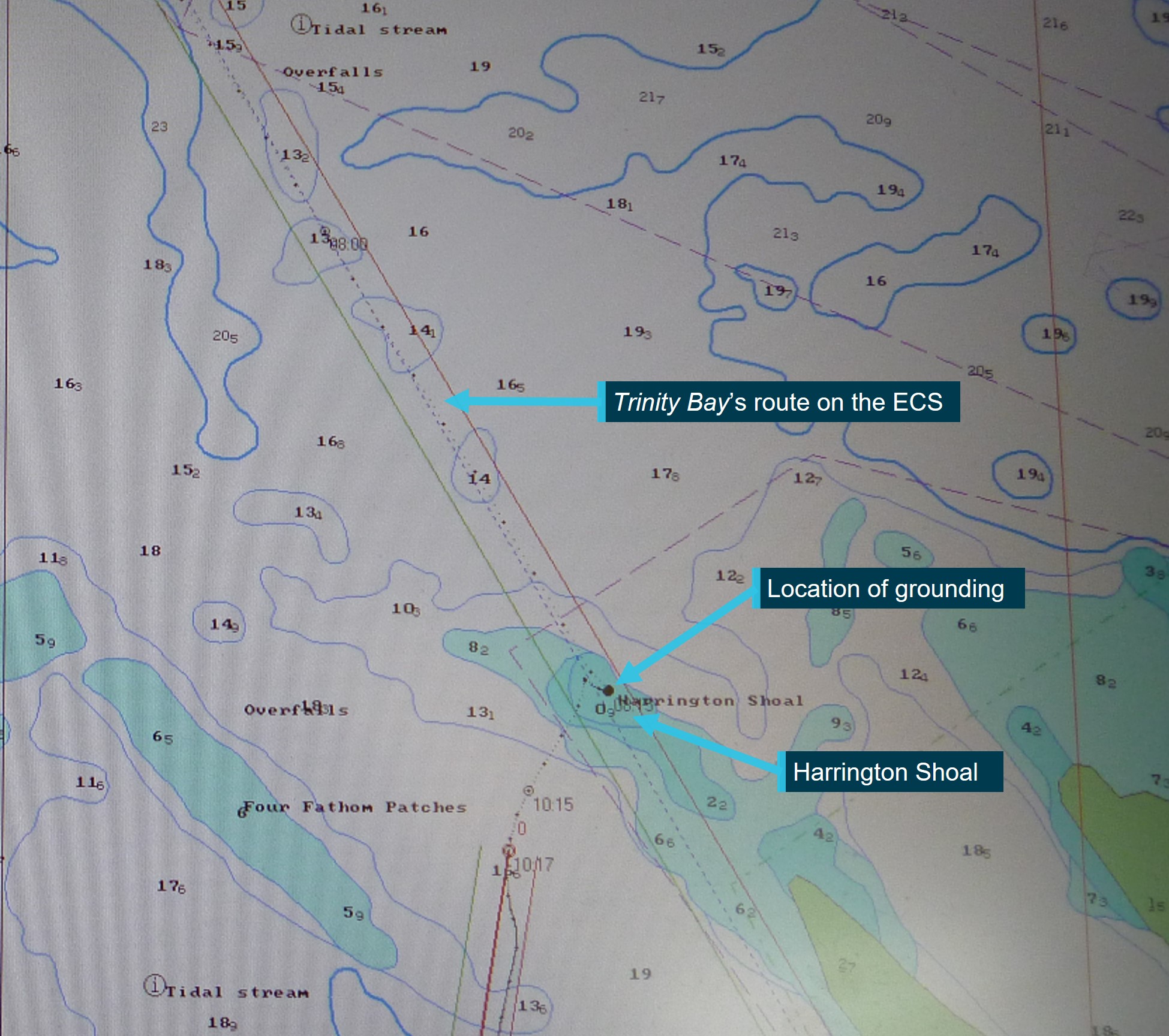
Image of TRANSAS ECS screen taken after grounding showing Trinity Bay’s planned route and track in vicinity of Harrington Shoal.
Source: Sea Swift, annotated by the ATSB.
ATSB analysis
During the investigation, the ATSB examined both workbooks that were received by Trinity Bay’s master, the final, printed passage plan document and the route saved on the ECS program.
The ATSB analysis identified several discrepancies in the ‘Passage Plan CNS‑HI’ workbook (used by the master to create the route from Thursday Island to Cairns) as summarised below and in Figure 8:
- There were 3 waypoints (numbered 28, 96, 97) named ‘Adolphus Channel’ with the latitude and longitude for waypoints 96 and 97 differing from those of waypoint 28
- the listed relative position (bearing and range from ‘Quetta Rock beacon’) for waypoint 28 was incorrect and inconsistent with the respective latitude and longitude coordinates
- the resulting leg between waypoint 97 and 98 in the spreadsheet’s sequence for a route from Adolphus Channel to Cairns passed directly over Harrington Shoal
- the leg preceding waypoint 97 passed over Mid Rock
- there were two distinct waypoints numbered 28— ‘Adolphus Channel’ and ‘Quetta Rock’—with different coordinates for each.
Examination of the other workbook (the ‘Passage Plan HI-CNS’ workbook) found that waypoints 97 and 98 differed from those with the same name and number in the workbook used by the master to construct the new route. In the ‘Passage Plan HI-CNS’ workbook’ waypoint 97, although still named ‘Adolphus Channel’, had coordinates that were different, and matched those of waypoints 28 and 96 in the workbook used by the master. Additionally, in this workbook, waypoint 98 was an entirely unique waypoint named ‘Harrington Reef’.
The analysis showed that a passage constructed using the same numbered waypoints (waypoints 97 and 98) but taken from the ‘Passage Plan HI-CNS’ workbook would have resulted in a route that passed Harrington Shoal safely (Figure 8).
Examination of Trinity Bay’s printed passage plan document for the grounding voyage also showed that the parallel index lines listed for the new route’s legs from waypoint 97 to waypoint 98 and from waypoint 98 to waypoint 99 were incorrect. However, these incorrect parallel index lines corresponded to the equivalent legs had the route been constructed using the ‘Passage Plan HI‑CNS’ workbook. This indicated that the master likely used the incorrect waypoints from the ‘Passage Plan CNS‑HI’ but copied the parallel index line information for the equivalent route legs from the ‘Passage Plan HI‑CNS’ workbook.
Figure 8: ATSB analysis showing discrepancies in waypoints and resulting routes
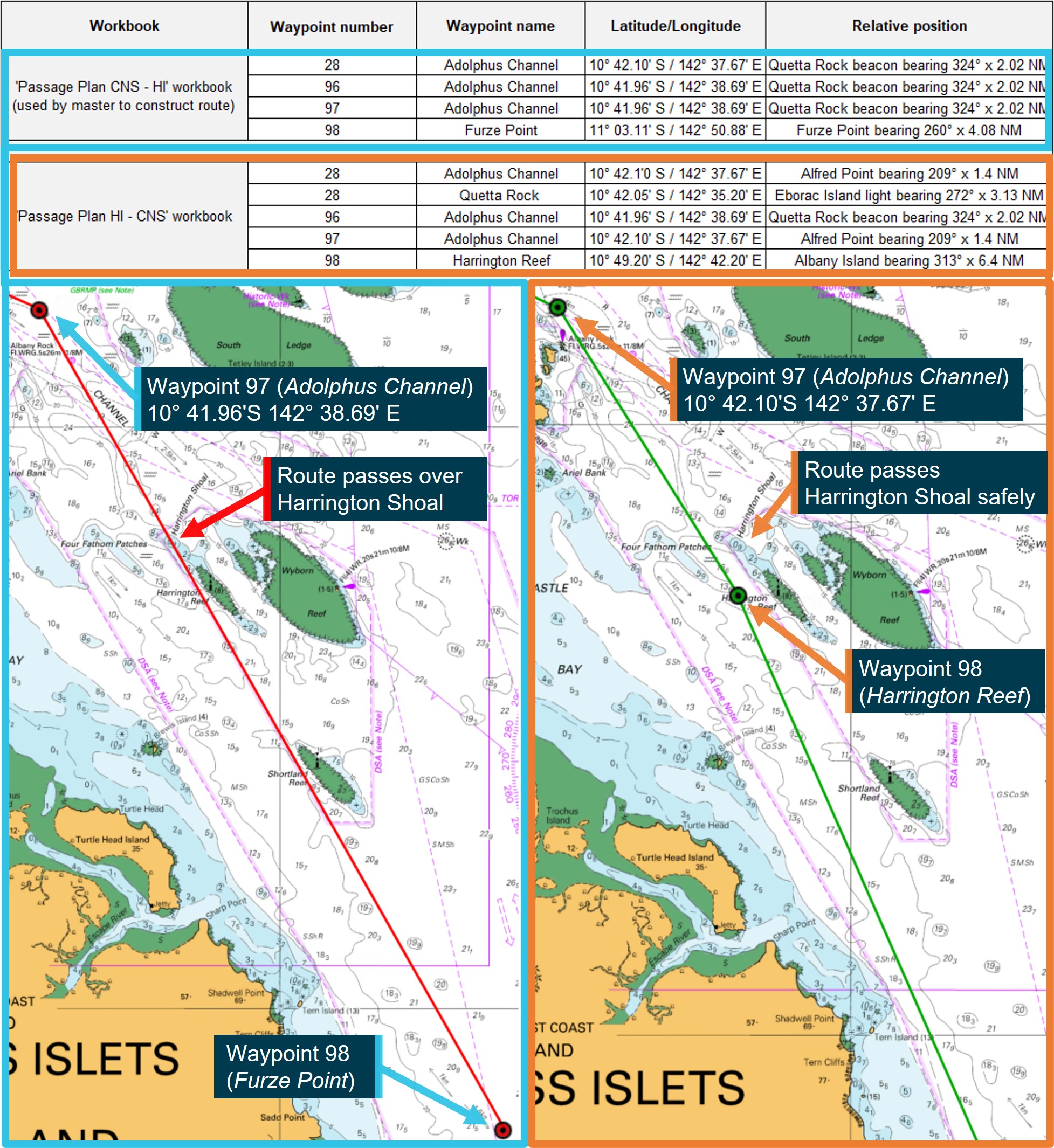
The chart figure on the left shows the route passing over Harrington Shoal using waypoints from the ‘Passage Plan CNS – HI’ workbook. The chart figure on the right shows a route, constructed with the same numbered waypoints but from the ‘Passage Plan HI – CNS’ workbook, passing Harrington Shoal safely.
Source: Australian Hydrographic Office, annotated by the ATSB based on analysis of Sea Swift passage planning workbooks
Waypoint anomaly
Following the grounding, the master reviewed the passage plan and discovered that an additional error had been made while entering the new route’s waypoints into the ECS. Waypoint 97 (Adolphus Channel) whose latitude and longitude coordinates were 10° 41.96’ S 142°38.69’ E had been incorrectly entered into the ECS as 10° 42.21338’ S 142° 38.84375’ E. The master was unable to explain the discrepancy although the error was probably made in the course of using the ECS computer mouse to ‘drop’ waypoints onto the displayed electronic chart.
The difference in the waypoint coordinates equated to the incorrectly entered waypoint being about 0.30 miles south-east of the coordinates for waypoint 97 detailed in the printed passage plan (Figure 9). Routes using either waypoint resulted in the following leg passing directly over Harrington Shoal although the preceding leg was moved about 0.15 miles away from Mid Rock.
Figure 9: Section of chart Aus 839 showing incorrectly input waypoint

Source: Australian Hydrographic Office, annotated by the ATSB.
Execution and monitoring
The execution and monitoring phases occur concurrently. The planned route, which has been checked and approved, is executed and the vessel’s progress against the route is monitored using all available means. Any concern or doubt with regard to the passage plan or the safety of the ship required the officer of the watch to call the master and, in the meantime, take appropriate action to ensure the safety of the vessel. Having not identified Mid Rock or Harrington Shoal as potential dangers to navigation on the route during the planning stage, the last opportunity to do so was during the monitoring phase of the passage.
On 15 January 2021, on departure from Cairns and prior to using the new routes for the first time, the master’s night orders cautioned watchkeepers that the ‘…new route of plotter will not line up exactly with chart route. Follow plotter route…’. The orders also instructed watchkeepers to ‘…stay within cross track error guidelines on plotter unless avoiding traffic…’.
On the day of the grounding, the OOW was primarily monitoring the ship’s passage using the ECS and was focussed on ensuring the vessel remained within the route’s cross track limits as displayed on the ECS. They were also plotting radar fixes on the paper chart Aus 839 at about 15‑minute intervals. However, the most appropriate scale chart for the area was Aus 292 which was not used. Furthermore, the new route was not plotted on the paper charts, which still retained the original routes marked in red ink.
The OOW’s radar fix, plotted at 0715, (Figure 10) showed the vessel on track to pass dangerously close to Mid Rock, a charted underwater rock with a depth of 4.9 m. However, the OOW was not alerted to the danger and continued with the passage eventually passing about 0.18 miles from Mid Rock at about 0720.
Figure 10: Chart extracts showing Trinity Bay's passage close to Mid Rock
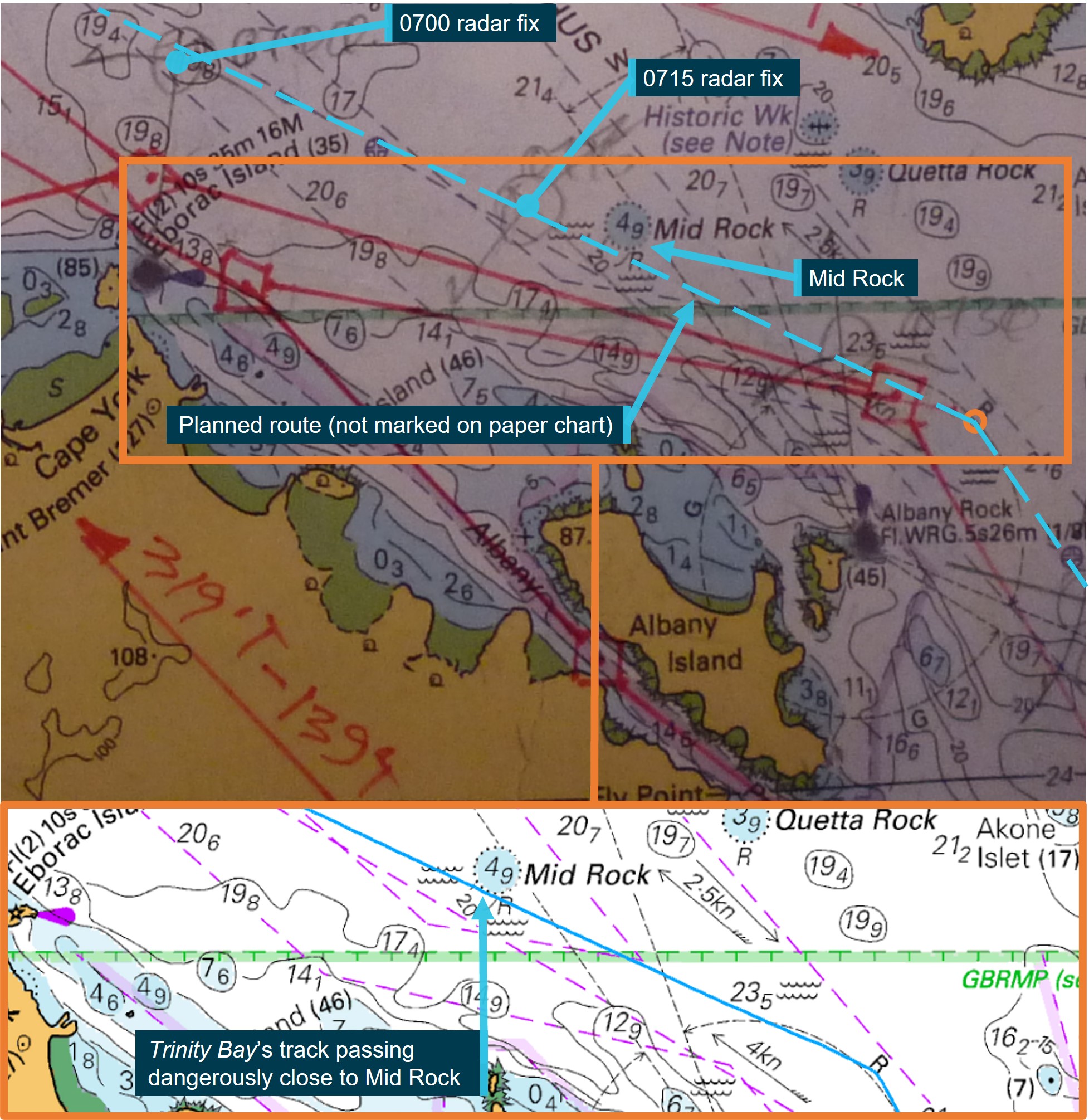
Source: Sea Swift and Australian Hydrographic Office, modified and annotated by the ATSB.
Radar fixes on the paper chart at 0745 and 0800 similarly showed the ship on track to pass over Harrington Shoal (Figure 11). While the OOW started to become concerned when they observed that the relative aspect of Harrington Reef west cardinal mark was different to what they were accustomed to, they nevertheless assessed that it was safe to continue the passage.
In both the above instances, the ECS display would also have shown the ship standing into danger.
Figure 11: Chart extracts showing Trinity Bay's passage leading up to grounding
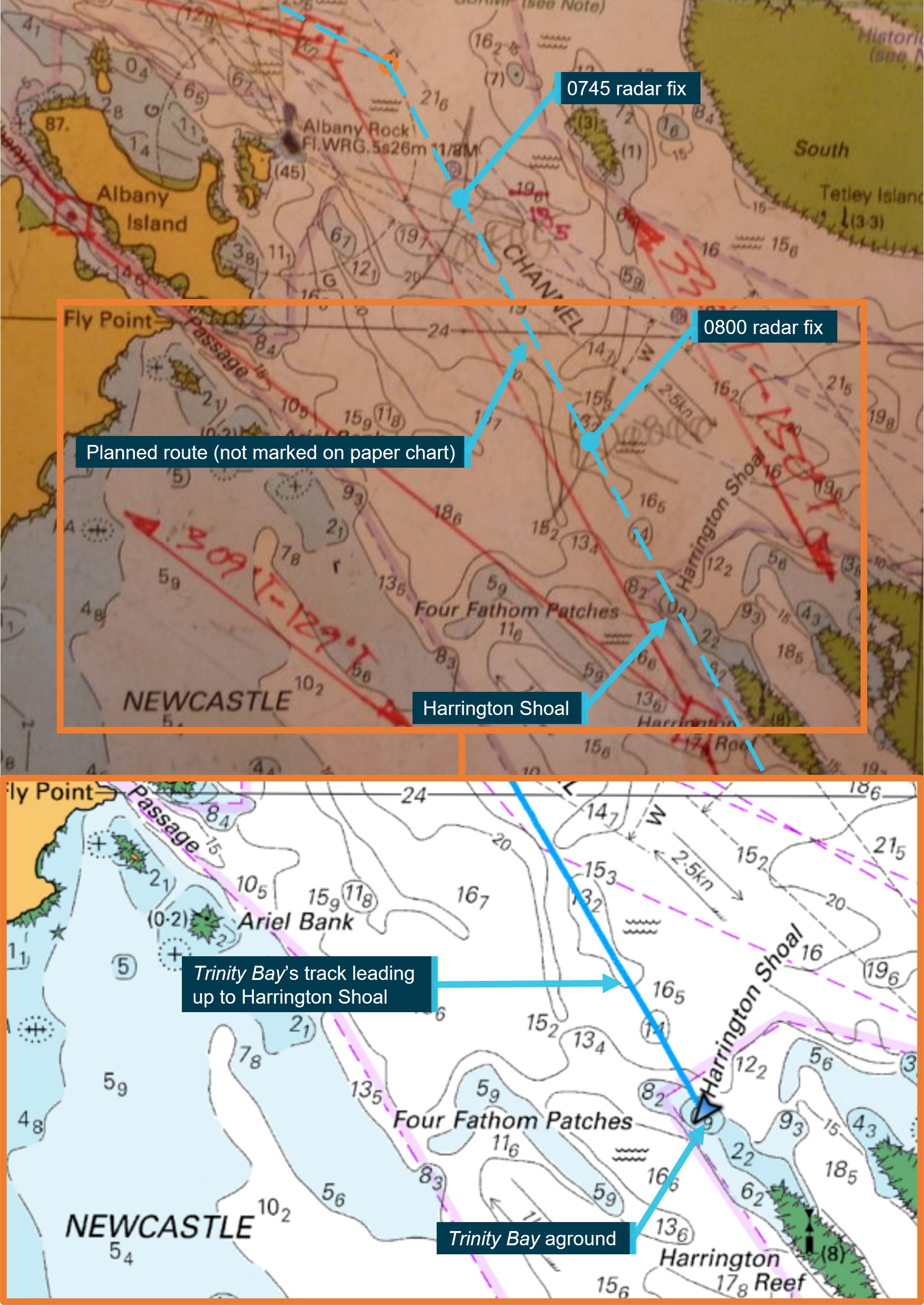
Source: Sea Swift and Australian Hydrographic Office, modified and annotated by the ATSB.
Great Barrier Reef and Torres Strait vessel traffic service (REEFVTS)
Background
The Great Barrier Reef and Torres Strait regions are internationally recognised for their cultural and environmental significance. The Great Barrier Reef Marine Park was established in 1975 and added to the World Heritage list in 1981. IMO subsequently named the Great Barrier Reef as the world’s first particularly sensitive sea area (PSSA) in 1990 followed by the Torres Strait in 2005.
In December 2004, the Queensland and Australian Governments established the Great Barrier Reef and Torres Strait vessel traffic service (REEFVTS) with the stated purpose to:
- make navigation in Torres Strait and the inner route of the Great Barrier Reef safer by working with shipping to give the best possible information on potential traffic conflicts and other navigational information;
- minimise the risk of maritime accidents, and therefore avoid the pollution and damage which such accidents can cause to the marine environment in the Great Barrier Reef and Torres Strait; and
- assist with quick response if a safety or pollution incident does occur.
Additionally, the Great Barrier Reef Marine Park Zoning Plan defined a designated shipping area (DSA) to help minimise impacts on the park from shipping activity. In 2014, a Two-Way Route system, designed to keep ships clear of charted hazards and to assist in safe and efficient navigation, was adopted by the IMO and implemented within the DSA.
REEFVTS authority and area
The Great Barrier Reef and Torres Strait Ship Reporting System (REEFREP) is a mandatory ship reporting system established under SOLAS and given effect by AMSA’s marine order 63 (MO 63)[34] which required ships, including Trinity Bay, to report to REEFVTS when navigating within the REEFVTS area (Figure 12).
REEFVTS is operated 24 hours a day by Maritime Safety Queensland (MSQ) under a memorandum of understanding with AMSA.
Figure 12: REEFVTS area boundary at the time of the grounding
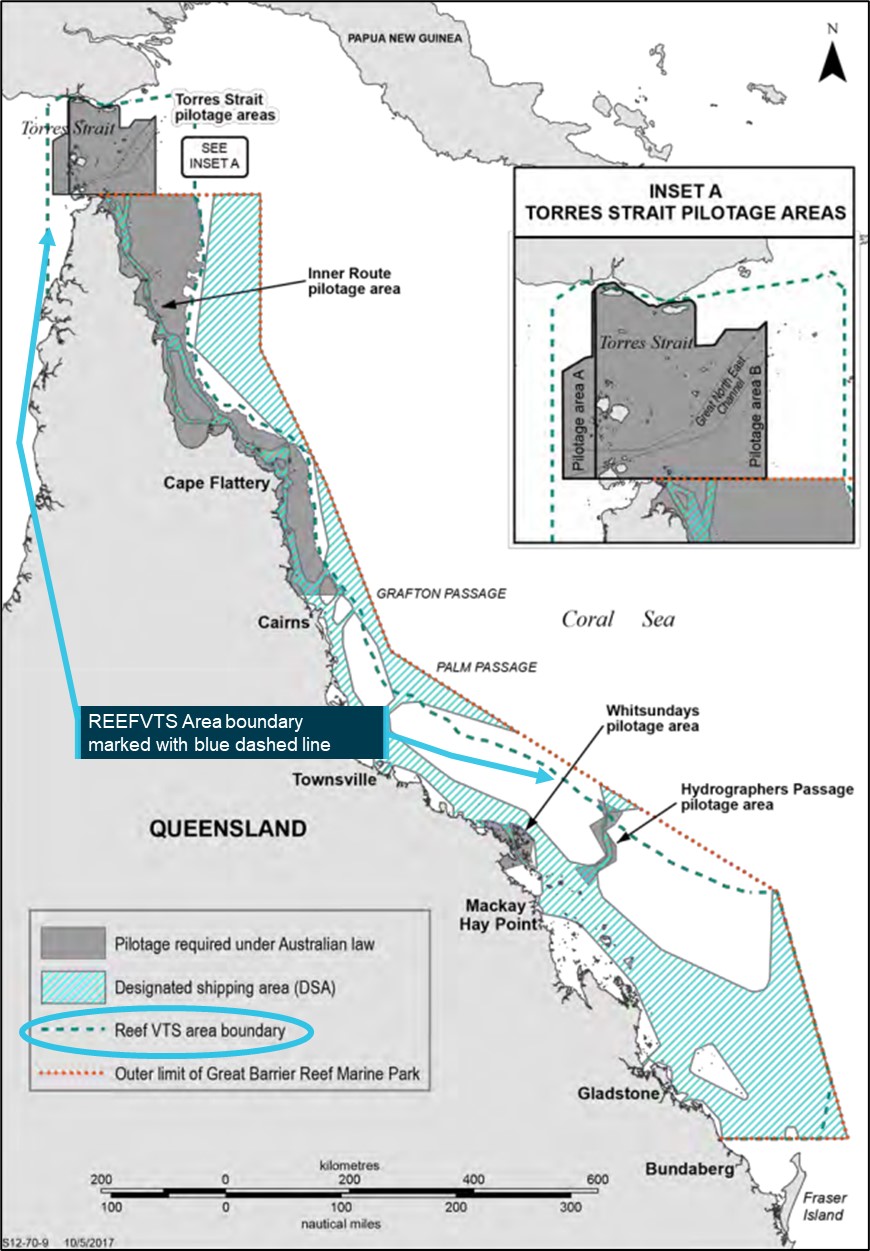
Source: Reef VTS user guide, annotated by ATSB.
REEFVTS monitoring systems
REEFVTS monitors and communicates with ships to ensure safe and efficient navigation within the compulsory reporting area. REEFVTS achieved this objective by maintaining a vessel traffic image[35] of shipping in the REEFVTS area and by providing ship masters and pilots with ship encounter information, maritime safety information and navigational support. Vessel traffic service operators (VTSOs) used a decision support tool (DST) to display the vessel traffic image and to monitor vessels in the REEFVTS area.
MaritimeCONTROL
MaritimeCONTROL was a new DST, introduced at REEFVTS in December 2020 to replace the previous system. The MaritimeCONTROL system integrated information and data from ships transiting the REEFREP area making it accessible via a single monitoring tool. The system displayed the REEFREP area overlayed with information such as ship positions, routes, and navigation features using several sources, including automatic identification system (AIS) information, radar and satellite data.
The system allowed for the configuration of boundaries to areas of critical interest including potential grounding areas, shallow water areas and other areas hazardous to navigation. These boundaries enabled the generation of visual and audible alerts to alert the VTSO to the development of situations potentially dangerous to navigation including area penetration alerts, shallow water alerts, alerts for entry and exit to the REEFREP area, line crossing alerts for critical turns and alerts if a vessel’s speed slowed significantly (indicative of grounding) (Figure 13).
Figure 13: MaritimeCONTROL display showing visual alerts for Trinity Bay
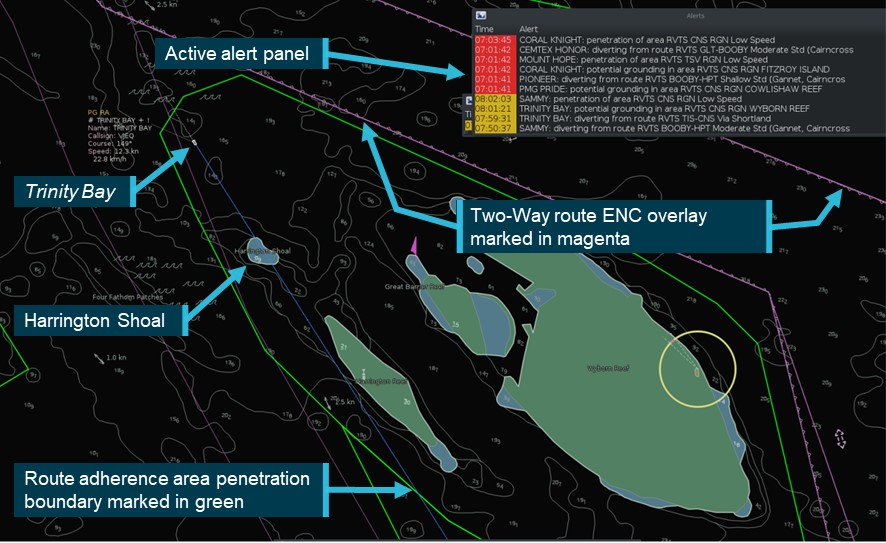
Image of MaritimeCONTROL screen showing ENC overlay of the Two-Way route and route adherence area penetration boundaries. The top right of the screen shows visual potential grounding alerts for Trinity Bay as a result of its breach of the green area boundary around Harrington Reef and Wyborn Reef.
Source: Maritime Safety Queensland, annotated by the ATSB.
REEFVTS was normally advised of a ship’s intended route by the marine pilot or ship’s master upon entry to or on commencement of the ship’s voyage within the mandatory reporting area. However, the VTSO could also allocate routes based on familiarity with a vessel’s operations or could request a master to clarify their intended route. Once allocated, the system monitored the progress of vessels on these routes and, if a vessel significantly deviated from the route, a route adherence alert was generated.
The responsibility for maintaining the systems and software used in REEFVTS monitoring, including MaritimeCONTROL, was delegated to MSQ.
System fault
On 10 January 2021, a fault was identified and reported to MaritimeCONTROL’s vendor by MSQ. The level 2 fault,[36] was associated with AIS tracking and resulted in multiple spurious route adherence alerts being generated in different locations continuously. The high number of spurious alerts generated continuous audible and visual alerts on the system display. By 4 February 2021, a software fix had been developed and testing had commenced, however the issue was not resolved until 12 August 2021.
In the meantime, REEFVTS operators were authorised to mute the audible alerts, although the visual active alert panel continued to be triggered and remained highlighted on the display screen whilst the alert state existed (Figure 13).
Vessel Traffic Service operator (VTSO)
At the time of the occurrence, REEFVTS operated out of the MSQ VTS Centre in Townsville, Queensland. REEFVTS was continually staffed by one operator and supported, if required, by another VTSO (who otherwise usually performed port VTS duties). The VTSO staff comprised 8 permanent and 4 casual employees rotating through 12-hour shifts for 2 days, then 2 nights, followed by 4 days off.
On the day of the grounding, the duty VTSO commenced their shift at 0600 following 4 days off. Their duties required them to monitor applicable vessels[37] in the REEFREP area ( Figure 12) using the MaritimeCONTROL system. At the start of their duty period, there were 41 active ship movements within the monitoring area with 2 more ship entries expected. This was under the threshold of 45 movements, detailed in REEFVTS operating procedures, where an additional VTSO could be called in to assist monitoring.
Between 0600 and 0822 that morning (when the master of Trinity Bay called REEFVTS to advise of the grounding), the VTSO was subject to 80 alerts, 42 of which were spurious and the result of the reported fault.
Trinity Bay alerts
At 0710 on 19 January 2021, Trinity Bay triggered a route adherence alert followed by a potential grounding alert at 0712. The alerts were a result of Trinity Bay diverting from the monitored route (assigned by the VTSO to the vessel based on past experience) and breaching the alert boundary surrounding Mid Rock. At 0717, following an interaction with a different ship, the VTSO acknowledged the Trinity Bay alerts. At 0719, after managing multiple route adherence and potential grounding alerts generated by another ship, the VTSO investigated Trinity Bay’s alerts and determined there was no cause for concern. At about that time, Trinity Bay was passing close to Mid Rock.
The VTSO recalled that, after departing Thursday Island for Cairns, Trinity Bay ‘triggered a couple of alerts’. In the VTSO’s experience, this was not unusual as coastal traders, particularly Trinity Bay, typically transited on the margins of configured routes and while this often triggered alerts, further investigation by the VTSO generally found the ship to be in safe water within the DSA. On this occasion, they investigated the alerts and determined that the ship was not in danger of grounding (as was typically the case in their experience) and that no action was necessary. They then turned their attention to managing other tasks and alerts.
At 0736, ship encounter information (SEI) was generated for Trinity Bay and forwarded to the ship by the VTSO. Between 0736 and 0759, the VTSO was occupied with various tasks including radio communications with other ships, manually generating and transmitting SEI, and acknowledging numerous alerts for other ships (see Appendix A – REEFVTS alerts leading up to the grounding for more detailed information).
At 0759, as Trinity Bay approached Harrington Shoal, the ship triggered a route adherence alert, which was acknowledged by the VTSO at 0800 (Figure 13). At 0801, Trinity Bay triggered a potential grounding alert and at 0809, the ship triggered a slow speed alert (indicating grounding), both of which the VTSO acknowledged. The ship grounded about a minute later at 0810. However, the 3 alerts leading up to Trinity Bay’s grounding were not investigated by the VTSO, who remained unaware the ship had grounded until notified by the master.
Workload
The VTSO’s recollection of the number of active movements, the number of alarms on the day and the challenge of managing them indicate that they were probably experiencing a sustained period of high workload (overload). The number of ship movements in the REEFREP area on the morning of the grounding was close to the threshold where additional resources would generally be required. In addition, the number of system-generated false alerts added significantly to the VTSO’s workload. The VTSO recalled experiencing ‘10 times the normal workload’ and that they couldn’t concentrate or effectively monitor the ships within the REEFVTS area as a result.
Workload is described by Wickens and Hollands, 2013:
Mental workload characterises the demands of tasks imposed on the limited information processing capacity of the brain in much the same way that physical workload characterises the energy demands upon the muscles. In any resource-limited system, the most relevant measure of demand is specified relative to the supply of available resources.
Humans are limited in the amount of new information their brain can process at once. Once this limit of cognitive resources has been reached their performance starts to decline with increased error rates and delayed responses resulting in cognitive overload and thus mental fatigue. Factors that can increase workload can range from excessive task demands, time pressures, a lack of operator skills and knowledge, or environmental conditions.
This overload can create operator stress and lead to an increase in errors (Kum, Furusho, Duru & Satir, 2007). When workload gets too high for the available resources, task shedding can occur (Green et al., 1996), resulting in some tasks being shed altogether, and others being shed in a non-optimal manner (Wickens et al, 2013).
In the 70 minutes before being alerted to the grounding, the duty VTSO was subject to over 50 alerts, 5 of which were alerts generated by Trinity Bay, with the last 3 directly forewarning of the grounding. The alerts generated by Trinity Bay at 0710 and 0712 (as it approached Mid Rock) were acknowledged immediately but were not investigated by the VTSO until about 0719 (7 minutes later). These alerts were determined not to require VTSO action, and the ship proceeded to pass dangerously close to Mid Rock and inside the alerting area boundary around Mid Rock. The following 3 alerts at 0759, 0801 and 0809 were generated as Trinity Bay approached Harrington Shoal. These alerts were also acknowledged but this time were not investigated until the VTSO was notified of the grounding.
Alarm fatigue
Between 0600 (when the VTSO commenced duty) and 0822 (when the VTSO was alerted to the grounding), the duty VTSO received over 80 alerts of which at least 42 were false, generated as a result of the system fault.
Li and others (2017) explain that alarm fatigue refers to distrust or neglect of triggered alarms. In general, alarm fatigue can occur from alarm flood, false alarms, indistinct alarms and more. In a VTS context, alarm fatigue would impair the performance of VTSOs, reduce their situation awareness and increase the possibility of human errors occurring. The research goes on to explain that system design plays a large role in reducing alarm fatigue by addressing issues with false alarms and restoring operators’ trust in the system.
In an aviation context, air traffic controllers are exposed to multiple signals, which is a sensory stimulus that serves the general function of notifying a human operator of a situation that might require their intervention (i.e., an alarm, alert, or warning) (Ruskin et al. 2021). Signals that are perceived as unreliable are likely to provoke the so-called ‘cry wolf effect’.
The ‘cry wolf’ effect is a general syndrome whereby excessive alarms, many of them seemingly unnecessary to the operator (such as false alerts), lead to a distrust, or disuse, in the alarm system. In turn, this operator distrust, or disuse, leads to a disregard of (or late response to) some true alarms (Lee & See, 2004; Parasuraman & Riley, 1997). This leads to a loss of trust in the system developing over time.
Research has found that false-alarm prone automation reduces overall performance, particularly affecting operator compliance and reliance (Dixon, Wickens & McCarley, 2006). In addition, research has shown that when an individual has to detect specific types of targets or stimuli over an extended period, their performance level will decrease, (Wickens and Hollands 2013).
The VTSO described having to manage a ‘horrendous amount of alerts’ that were appearing faster than they could be addressed, including a significant number of false alarms, particularly whilst they were trying to manage genuine alerts requiring follow-up or action. Managing these false alarms increased the already high workload and reduced the VTSO’s ability to concentrate and effectively monitor the ships within the REEFVTS area.
Coastal pilotage
In 1991, following the declaration of the Great Barrier Reef as the world’s first particularly sensitive sea area (PSSA) the previous year, Australia introduced compulsory pilotage for ships of 70 m or more in length and all type/size of loaded tankers.[38] Under the Navigation Act 2012 (Nav Act), compulsory pilotage was required for applicable vessels in the Great Barrier Reef area north of Cairns[39] and the Hydrographers Passage (Figure 12). Pilotage is separately and additionally required in these areas under the Great Barrier Reef Marine Park Act 1975 (GBRMP Act). In 2006, the Nav Act’s compulsory pilotage regime was extended to include the Torres Strait[40] following its own recognition as a PSSA. These pilotage areas are defined in marine order 54 (MO 54)[41] and/or the Great Barrier Reef Marine Park Regulations 1983.
The Australian Maritime Safety Authority (AMSA) is responsible for the safety regulation of coastal pilotage including ensuring that domestic commercial vessels (DCVs) complied with the relevant requirements.
Pilotage exemptions
To operate as ‘coastal pilot exempt’, a vessel must have a current ‘exemption’ certificate issued by AMSA and/or the Great Barrier Reef Marine Park Authority (GBRMPA). Where an exemption is required exclusively for operations in the Torres Strait and/or the Great North East Channel pilotage area, a pilotage exemption is required under the Nav Act and granted by AMSA. Where an exemption is required for the Inner Route, Hydrographers Passage, or the Whitsundays (pilotage areas which are the subject of both Acts), separate applications must be made to AMSA as well as the GBRMPA.
In addition to the vessel exemption, the Nav Act requires that the master and any navigational watchkeepers on watch when the vessel is in a compulsory pilotage area should also have current AMSA ‘approval’ to act in their positions on the exempt vessel.
Depending on the pilotage area for which the exemption was sought, applications addressing the prescribed information[42] were required to be made to AMSA and/or the GBRMPA in accordance with the requirements of the corresponding act. AMSA and/or the GBRMPA then assessed the applications including a technical assessment of the vessel, the qualifications and experience of the master and nominated navigational watchkeepers, and a consideration of the associated environmental risks before deciding.
Trinity Bay’s exemption
On 6 November 2018, AMSA conducted an audit and inspection of Trinity Bay following an application for a coastal pilotage exemption. The inspection and audit were undertaken using an audit checklist and included assessment and/or verification of:
- the prescribed information required to be provided in the application
- the validity of the master’s and navigational watchkeepers’ certificates of medical fitness
- the validity and appropriateness of relevant qualifications (including seafaring Certificates of Competency and radio operator’s certificates) for the master and navigational watchkeepers
- details of recent navigational experience in the compulsory pilotage areas of the master and navigational watchkeepers
- the validity of the vessel’s Certificate of Operation (and, if held, the Certificate of Survey)
- a review of the vessel’s passage plans and their substantial compliance with the requirements of SOLAS and the IMO guidelines
- a review of the application of appropriate navigational techniques and methodology including evidence of substantial compliance with passage plans
- evidence of substantial compliance with REEFVTS reporting requirements and knowledge of REEFVTS services, operations and interaction
- the status of relevant nautical publications and references held onboard
- the nautical chart folio, application of Notices to Mariners, maritime safety warnings, meteorological warnings, updates and associated procedures
- carriage of GBRMPA zoning information and charts
- watchkeeping arrangements including relevant fatigue management policies and procedures
- standing orders and night order’s content and understanding
- automated watchkeeping alarms and bridge navigation watchkeeping alarm system status.
The audit recorded that compliance with a passage plan was evidenced during the audit, including that radar was the primary means of position fixing used on board. It was also noted that ECS was only used as an aid and that it provided a cross track error alarm capability.
Having conducted the audit, reviewed the information in the application, and considered the vessel’s risk profile (including maximum draught, areas of operation, navigational equipment onboard and the experience of the master and crew), the vessel was deemed to have met the requirements for an exemption. On 10 December 2018, AMSA issued a certificate of exemption for Trinity Bay valid for 5 years. Separately, endorsements were granted for the master and navigational watchkeepers approving them to act in those positions aboard Trinity Bay.
A letter detailing the assessment and recommending that Trinity Bay be exempted from the requirement to carry a licensed coastal pilot was subsequently forwarded to the GBRMPA on 21 November 2018. Consequently, the GBRMPA issued a vessel exemption for the same period.
Similar occurrences
Over the past 2 decades, flag administrations and agencies with a responsibility to investigate safety occurrences have investigated several groundings with certain common recurring themes relating to the planning and monitoring phases of the passage planning process.
Kaami
On 23 March 2020, the general cargo vessel Kaami ran aground on Sgeir Graidach shoal in the Little Minch on the west coast of Scotland, while on passage from Drogheda, Ireland to Slite, Sweden. The crew were safely evacuated from the vessel by coastguard helicopter and Kaami was successfully refloated by salvors on 4 May 2020. There were no injuries but the damage to Kaami’s hull was extensive, and the ship was declared a constructive total loss.
The United Kingdom’s MAIB investigated the grounding and published Report No. 7/2021. The investigation concluded that:
- a full appraisal of information was not made in the voyage planning process
- a visual check of the route using appropriately scaled electronic navigation charts was not conducted
- the ECDIS route safety check was not carried out
- a second check of the voyage plan did not take place which meant the plan was created by a single person in isolation, and monitoring of the passage was ineffective.
Additionally, they concluded the watchkeepers at Stornoway Coastguard Operations Centre did not intervene prior to Kaami’s grounding as they were unaware of the developing situation.
Ovit
On 18 September 2013, the Malta registered chemical tanker Ovit grounded on the Varne Bank in the Dover Strait while on passage from the Netherlands to Italy. The ship’s primary means of navigation was ECDIS using MARiS 900 ECDIS units. The passage plan passed directly over the Varne Bank in the English Channel. The ship refloated on a rising tide about 2.5 hours after grounding with only minor paint damage.
The United Kingdom’s MAIB investigated the grounding and published Report No. 24/2014. The investigation concluded that the passage had been planned over the Varne Bank by an inexperienced, junior officer. The plan was not properly checked for navigational hazards using the ECDIS route checking function nor was it checked by the master.
CFL Performer
On 12 May 2008, the Netherlands registered dry cargo ship CFL Performer grounded on Haisborough Sand off the East coast of England while on passage from Suriname to the United Kingdom. The ship’s primary means of navigation was ECDIS using Furuno FEA-2107 ECDIS units. The ship’s route was planned across Haisborough Sand, a shoal about 10 mile long and 1 mile wide, where the charted depth of water was considerably less than the vessel’s draught. The ship grounded about 29 minutes after the OOW adjusted course to follow the ship’s planned route. The ship was refloated shortly after with no reported injuries, damage or pollution.
The United Kingdom’s MAIB investigated the grounding and published Report No. 21/2008. The investigation concluded that the route plan was not adequately checked for navigational hazards in either the planning or monitoring stages of the passage plan process. The ECDIS’s route check page was not used to check each leg of the route for navigational hazards. The investigation also found that none of the ship’s bridge watchkeeping officers had been trained in the use of ECDIS and that the ECDIS’s watch vector (look-ahead function) was not activated.
Safety analysis
Introduction
On the morning of 19 January 2021, the general cargo ship Trinity Bay grounded on Harrington Shoal while transiting the inner route of the Great Barrier Reef Marine Park mandatory pilotage area, on passage from Thursday Island in the Torres Strait to Cairns, Queensland. The ship sustained minor hull damage with no reported injuries or oil pollution.
Harrington Shoal was a charted feature in the Great Barrier Reef and Trinity Bay had successfully transited the area, about 8 times per month, for the preceding 10 years, but on this occasion was using a new passage plan for the voyage south to Cairns.
This analysis examines, among other factors, the operator’s safety management system (SMS) and introduction of standardised passage plans, the voyage planning process, shipboard use of unofficial electronic chart system (ECS) and REEFVTS surveillance and monitoring.
Crew fatigue, the Australian Maritime Safety Authority’s (AMSA) pilotage exemption processes and the management of change processes of the operator (Sea Swift) and REEFVTS were also considered and discounted as factors that contributed to the grounding.
Safety management system
Sea Swift’s SMS required that only designated person ashore (DPA)-approved routes be used for navigation. While Sea Swift was in the process of trialling a draft passage planning tool (an Excel workbook) with the intention of introducing standardised passage plans in the future, at the time of the occurrence there were no DPA-approved routes in existence in the operator’s Queensland fleet. This meant that vessels were effectively unable to comply with this SMS requirement.
In the absence of DPA-approved routes, crews on ships including Trinity Bay, continued to operate using proven routes that, in some cases, had been in use for over 10 years. However, during an internal audit, a non-conformance related to passage planning was recorded against the ship. In seeking to rectify the non-conformance, Trinity Bay’s master sought, and obtained, what they believed were safe, DPA-approved waypoints from the ship trialling the passage planning workbook. Trinity Bay’s master then used waypoints from this workbook to construct new routes, including the route from Thursday Island to Cairns. However, the waypoints defining one of the legs on the route to Cairns, as listed in the workbook, resulted in a route leg passing dangerously close to Mid Rock.
More significantly, a route leg also passed directly over the charted navigational danger of Harrington Shoal.
Passage planning
Planning
Passage planning procedures in Trinity Bay’s SMS generally reflected IMO guidelines and international best practice on the subject. Key elements of the planning phase involved laying out (or plotting) the route on the ship’s primary means of navigation (paper charts), visually checking the route for dangers and engaging an independent check to verify that the route was safe. In this instance, the master entered the waypoints for the new routes directly into the ship’s electronic chart system (ECS).
While the master reported checking that the waypoints were in safe water, the route legs between the waypoints were not visually checked for dangers, nor did the ECS possess automatic route safety checking functions. Furthermore, had the new waypoints and route been plotted on the ship’s paper charts, the physical act of drawing the route leg over Harrington Shoal would have made the danger obvious and readily identifiable. Finally, there was no independent verification of the passage plan sought from another deck officer, which meant that another opportunity to identify the danger during the planning phase was lost.
The failure in the planning phase to detect that the route was plotted across Harrington Shoal and close to Mid Rock meant that an unsafe passage had been planned and put into use. The remaining opportunity to detect the danger was the monitoring phase of the passage plan process.
Monitoring
Once the passage had been put into use, it fell to the officers of the watch (OOW) to execute and monitor the ship’s progress against the passage plan. The OOW was required to ensure that the ship remained safe at all times within the parameters set out in the approved passage plan and that the master was called in the event there were concerns with the passage.
On board Trinity Bay, the route in use was only displayed on the ECS and not plotted on the official paper charts which retained the ship’s old routes. The master’s night orders acknowledged this, advising OOWs that routes on the ECS and paper charts would differ and that the route displayed on the ECS was the route to be executed and monitored. Consequently, the OOW focussed on keeping the ship on the planned route displayed on the ECS.
Radar position fixes plotted on the paper charts by the OOW showed the ship on track to pass dangerously close to Mid Rock. Similarly, position fixes on the paper charts in the time leading up to the grounding, clearly showed the ship on track to ground on Harrington Shoal. In both instances, the danger posed to the ship should have been readily evident on the paper chart based on projecting the ship’s track (as indicated by the consecutive radar fixes) forward. Additionally, effective monitoring of the ship’s progress on the ECS should also have alerted the OOW to the fact that the route was laid across the shoal.
The OOW identified that parallel index lines listed in the passage plan did not correspond to the new route’s legs and observed that the ship appeared closer to the Harrington Reef west cardinal mark than usual. However, these did not alert the OOW to an issue with the route and they did not investigate further or call the master. There were several opportunities for the OOW to detect that Trinity Bay was running into danger however the monitoring of the passage was ineffective and, consequently they were unaware of the danger until the ship grounded.
REEFVTS
On the morning of the grounding, the duty vessel traffic service operator (VTSO) was very likely experiencing a sustained high workload. They were managing multiple vessel movements within the REEFREP area with the number of movements close to the REEFVTS-defined threshold when additional VTSO assistance would generally be required. Additionally, a known technical fault in the REEFVTS monitoring and surveillance system used by VTSOs resulted in a significant number of spurious alerts and alarms being generated. Consequently, the VTSO was also subject to a large number of false alarms interspersed with legitimate alerts requiring action.
The sustained high workload, compounded by likely alarm fatigue as a result of the system fault, probably resulted in decreased performance and in the VTSO being unable to adequately address and investigate all incoming alerts in an optimal manner. The VTSO’s experience and familiarity with Trinity Bay’s regular and relatively incident-free history of operations in the reef, also likely influenced their expectation that alerts generated by the ship were less likely to be indicative of a potential adverse situation developing.
In the 10 minutes leading up to Trinity Bay’s grounding, there were 3 alerts forewarning of the potential grounding. However, while these alerts were acknowledged, they were not investigated and the VTSO remained unaware of the situation until notified of the grounding by the master via mobile telephone.
Findings
|
ATSB investigation report findings focus on safety factors (that is, events and conditions that increase risk). Safety factors include ‘contributing factors’ and ‘other factors that increased risk’ (that is, factors that did not meet the definition of a contributing factor for this occurrence but were still considered important to include in the report for the purpose of increasing awareness and enhancing safety). In addition ‘other findings’ may be included to provide important information about topics other than safety factors. Safety issues are highlighted in bold to emphasise their importance. A safety issue is a safety factor that (a) can reasonably be regarded as having the potential to adversely affect the safety of future operations, and (b) is a characteristic of an organisation or a system, rather than a characteristic of a specific individual, or characteristic of an operating environment at a specific point in time. These findings should not be read as apportioning blame or liability to any particular organisation or individual. |
From the evidence available, the following findings are made with respect to the grounding of Trinity Bay on Harrington Shoal, Queensland on 19 January 2021.
Contributing factors
- Trinity Bay’s master used an uncontrolled, erroneous draft passage planning tool to make a new passage plan with the aim of addressing a recent internal audit non-conformity about passage planning and to comply with the operator’s requirement to use approved routes and waypoints.
- An independent verification of the new passage plan, as required by the operator’s procedures and by best practice was not done, and no one identified that the ship’s planned track passed directly over the charted danger of Harrington Shoal.
- The new planned tracks were entered into the electronic chart system instead of being annotated on the paper charts, the primary means of navigation, which indicated tracks along the ship’s usual passage plan.
- Trinity Bay’s officer of the watch was not monitoring the ship’s progress effectively, resulting in the ship passing dangerously close to the charted danger of Mid Rock at about 0720 before grounding on Harrington Shoal 50 minutes later.
- In the time leading up to the grounding and subsequently, route adherence alerts, potential grounding alerts and slow speed alerts associated with Trinity Bay were acknowledged by the duty operator at REEFVTS but not followed up. This was due to the operator experiencing a sustained period of elevated workload combined with a high level of expectancy that the ship was not at risk as it frequently transited the area.
- An ongoing technical fault in the REEFVTS monitoring and surveillance system caused an abnormally high number of erroneous alerts and alarms. Consequently, REEFVTS operators were experiencing sustained periods of elevated workload, including that of the operator at the time of the Trinity Bay’s grounding. (Safety issue)
Safety issues and actions
|
Depending on the level of risk of a safety issue, the extent of corrective action taken by the relevant organisation(s), or the desirability of directing a broad safety message to marine industry, the ATSB may issue a formal safety recommendation or safety advisory notice as part of the final report. All of the directly involved parties were provided with a draft report and invited to provide submissions. As part of that process, each organisation was asked to communicate what safety actions, if any, they had carried out or were planning to carry out in relation to each safety issue relevant to their organisation. Descriptions of each safety issue, and any associated safety recommendations, are detailed below. Click the link to read the full safety issue description, including the issue status and any safety action/s taken. Safety issues and actions are updated on this website when safety issue owners provide further information concerning the implementation of safety action. |
REEFVTS monitoring
Safety issue number: MO-2021-001-SI-01
Safety action not associated with an identified safety issue
| Whether or not the ATSB identifies safety issues in the course of an investigation, relevant organisations may proactively initiate safety action in order to reduce their safety risk. The ATSB has been advised of the following proactive safety action in response to this occurrence. |
Additional safety action by Sea Swift
In response to the incident, Sea Swift advised the ATSB that:
- the TRANSAS electronic chart system program was removed from service.
- a mentoring and audit program was implemented across the operator’s fleet to ensure crew understood the operator’s safety management system requirements on passage planning and navigation and that it was effectively implemented.
- the operator was investigating fully compliant electronic chart display and information system options for its vessels.
Glossary
| AIS | Automatic Identification System |
| AMSA | Australian Maritime Safety Authority |
| ECDIS | Electronic Chart Display and Information System |
| ECS | Electronic Chart System |
| ENC | Electronic Navigational Chart |
| GBRMPA | Great Barrier Reef Marine Park Authority |
| IMO | International Maritime Organisation |
| IMS | Integrated Management System |
| ISM Code | International Management Code for the Safe Operation of Ships and for Pollution Prevention. |
| MSQ | Maritime Safety Queensland |
| NSCV | National Standard for Commercial Vessels |
| PSSA | Particularly Sensitive Sea Area |
| REEFVTS | Great Barrier Reef and Torres Strait Vessel Traffic Service |
| SEI | Ship Encounter Information |
| SOLAS | The International Convention for the Safety of Life at Sea, 1974, as amended. |
| SMS | Safety management system |
| VTS | Vessel Traffic Service |
Sources and submissions
Sources of information
The sources of information during the investigation included:
- the master and chief mate on board Trinity Bay
- Australian Maritime Safety Authority
- Maritime Safety Queensland
- Sea Swift.
References
Australian Maritime Safety Authority, 2016, Marine Order 27 – Safety of navigation and radio equipment 2016, AMSA, Canberra.
Australian Maritime Safety Authority, 2014, Marine Order 54 (Coastal pilotage) 2014, AMSA, Canberra.
Australian Maritime Safety Authority, 2019, Marine Order 63 (Vessel reporting systems) 2019, AMSA, Canberra.
Australian Maritime Safety Authority, 2018, Marine Order 504 – Certificates of operation and operation requirements - national law, AMSA, Canberra.
Dixon SR, Wickens CD, McCarley JS. How do automation false alarms and misses affect operator compliance and reliance? In Proceedings of the Human Factors and Ergonomics Society Annual Meeting 2006 Oct (Vol. 50, No. 1, pp. 25-29). Sage CA: Los Angeles, CA: SAGE Publications.
Green, R. G., Muir, H., James, M., Gradwell, D., & Green, R. L. (1996). Human factors for pilots. Second edition. Ashgate, UK.
International Maritime Organization, 2014, The International Convention for the Safety of Life at Sea (SOLAS) 1974 as amended, IMO, London.
Kum S, Furusho M, Duru O, Satir T. Mental workload of the VTS operators by utilising heart rate. TransNav, International Journal on Marine Navigation and Safety of Sea Transportation. 2007 Jun 1;1(2).
Lee JD, See KA. Trust in automation: Designing for appropriate reliance. Human factors. 2004 Mar;46(1):50-80.
Li F, Lee CH, Xu G, Chen CH, Khoo LP. A QFD-enabled conceptualization for reducing alarm fatigue in vessel traffic service centre. In Transdisciplinary Engineering: A Paradigm Shift 2017 (pp. 821-828). IOS Press.
Parasuraman R, Riley V. Humans and automation: Use, misuse, disuse, abuse. Human factors. 1997 Jun;39(2):230-53.
Ruskin KJ, Corvin C, Rice S, Richards G, Winter SR, Ruskin AC. Alarms, alerts, and warnings in air traffic control: an analysis of reports from the Aviation Safety Reporting System. Transportation research interdisciplinary perspectives. 2021 Dec 1;12:100502.
Sea Swift Integrated Management System (IMS) Standard Operating Procedures (SOP) IMS-SOP-020 Marine Operations, revision 1.8, 23 October 2020.
Sea Swift Integrated Management System (IMS) Standard Work Instruction (SWI) IMS-SWI-020.21 Passage Planning, revision 1.4, 3 November 2020.
Wickens CD, Hollands JG, Banbury S & Parasuraman R (2013) Engineering psychology and human performance, 4th edition, Pearson Boston, MA.
Submissions
Under section 26 of the Transport Safety Investigation Act 2003, the ATSB may provide a draft report, on a confidential basis, to any person whom the ATSB considers appropriate. That section allows a person receiving a draft report to make submissions to the ATSB about the draft report.
A draft of this report was provided to the following directly involved parties:
- the master and chief mate of Trinity Bay
- Sea Swift
- Australian Maritime Safety Authority
- Maritime Safety Queensland
Submissions were received from:
- Australian Maritime Safety Authority
The submissions were reviewed and, where considered appropriate, the text of the report was amended accordingly.
Appendices
Appendix A – REEFVTS alerts leading up to the grounding
Table 1 below outlines the MaritimeCONTROL event list for the period from 0659 to 0822 on 19 January 2022, with description and actions taken in the lead up to Trinity Bay grounding.
Table 1: MaritimeCONTROL event list from 0659 to 0822 on 19 January 2021
| Time | Action / Description |
| 0659 | Reef VTS communicated with MV Golden Kennedy for entry report on VHF 11 |
| 0704 | MV Mount Hope triggered multiple RA [route adherence] and AP [area penetration] alerts |
| 0705 | Bulk Carrier MV Sammy triggered AP Slow Speed alert |
| 0706 | Reef VTS acknowledged MV Sammy alert |
| 0709 | SEI generated and sent for STI Topaz |
| 0710 | MV Trinity bay triggered RA alert |
| 0712 | MV Trinity Bay triggered PG [potential grounding] alert |
| 0713 | SEI generated and sent for MV Central |
| 0717 | Reef VTSO acknowledged both alerts |
| 0718 | MV Mount Hope triggered multiple RA and AP alerts |
| 0719 | Reef VTSO investigated MV Trinity Bay's position and situation |
| 0723 | LCT MV Biquele Bay triggered RA alert |
| 0726 | Reef VTS Acknowledged MV Biquele Bay alert |
| 0728 | MV Mount Hope triggered multiple RA and AP alerts |
| 0730 | Bulk Carrier MV Sammy triggered Critical turn alarm, Reef VTSO acknowledged. Reef VTSO commenced following ship by setting up a follow track sub window to monitor ship around the critical turn. |
| 0731 | MV PMG Pride Triggered PG alert Cowlishaw Reef |
| 0734 | MV Mount Hope triggered multiple RA and AP alerts |
| 0735 | MV Elm K triggered a RA alert, Reef VTSO acknowledged. Alert due to ship picking up reef pilot |
| 0736 | SEI generated and sent for MV Trinity Bay |
| 0736 | MV Ywam PNG triggered RA alert and line crossing alert. Reef VTSO acknowledged, investigated normal operation for small vessel. |
| 0738 | SEI generated and sent via Inmarsat to MV Legato II |
| 0738 | HMAS Leeuwin line crossing into Reef VTS area, Reef VTSO acknowledged |
| 0740 | Reef VTS communicated with West Treasure for entry report on VHF 11 |
| 0741 | MV Mount Hope triggered multiple RA and AP alerts |
| 0746 | Reef VTS communicated with MV Leikanger for final report on VHF 14 |
| 0746 | MV Malu Trojan triggered line crossing alert, Reef VTSO acknowledged |
| 0746 | Reef VTS answered TSV port VTS phone call |
| 0747 | MV Mount Hope triggered multiple RA and AP alerts |
| 0747 | HMAS Melville line crossing into Reef VTS area |
| 0750 | Bulk Carrier MV Sammy triggered RA alert, Reef VTSO acknowledged. |
| 0750 | MV Mount Hope triggered multiple RA and AP alerts, Reef VTSO acknowledged |
| 0751 | Reef VTSO acknowledged HMAS Melville line crossing alerts, Reef VTSO acknowledged |
| 0752 | Reef VTS communicated with Bulk Carrier MV Sammy questioning intentions after exiting route on VHF 11 |
| 0754 | MV West Treasure triggered line crossing alert |
| 0755 | Reef VTS acknowledged MV Sammy RA alert |
| 0756 | MV Mount Hope triggered multiple RA and AP alerts |
| 0756 | 07:56 – 07:57 VTSO communicated with MV Elm K on VHF 14 |
| 0758 | Reef VTS acknowledged MV Mount Hope alerts |
| 0759 | SEI generated manually and sent via Inmarsat to MV RTM Piiramu |
| 0759 | SEI generated manually and sent via Inmarsat to MV Elk K |
| 0759 | MV Trinity Bay triggered RA alert |
| 0800 | Reef VTS acknowledged MV Trinity Bay RA alerts |
| 0801 | Trinity Bay triggered PG alert, Reef VTSO acknowledged |
| 0801 | MV Mount Hope triggered multiple RA and AP alerts |
| 0801 | Reef VTS communicated with MV Gulf Explorer for entry report on VHF 11 |
| 0802 | Bulk Carrier MV Sammy triggered AP Slow Speed alert, Reef VTSO acknowledged |
| 0802 | MV Golden Kennedy triggered Critical turn alarm, Reef VTSO acknowledged |
| 0804 | MV STI Topaz triggered RA alert |
| 0806 | Reef VTS acknowledged MV STI Topaz RA alert |
| 0806 | MV Mount Hope triggered multiple RA and AP alerts |
| 0808 | MV Ywam PNG triggered line crossing alert |
| 0809 | MV Trinity bay triggered AP Slow Speed Alert (N.B. Trinity Bay grounded) |
| 0811 | MV Trinity Bay triggered AP alert acknowledged |
| 0811 | MV Mount Hope triggered multiple RA and AP alerts |
| 0813 | MV Tianjin Venture triggered RA alert |
| 0813 | MV Golden Wave triggered AP slow speed alert |
| 0814 | MV African Lake AP slow speed alert, Reef VTSO acknowledged |
| 0814 | MV Golden Wave triggered AP slow speed alert acknowledged |
| 0814 | MV Tianjin Venture triggered RA alert acknowledged |
| 0816 | SEI generated and sent via Inmarsat to MV African Lake |
| 0822 | Master of MV Trinity Bay advises via phone ship is aground |
Purpose of safety investigationsThe objective of a safety investigation is to enhance transport safety. This is done through:
It is not a function of the ATSB to apportion blame or provide a means for determining liability. At the same time, an investigation report must include factual material of sufficient weight to support the analysis and findings. At all times the ATSB endeavours to balance the use of material that could imply adverse comment with the need to properly explain what happened, and why, in a fair and unbiased manner. The ATSB does not investigate for the purpose of taking administrative, regulatory or criminal action. TerminologyAn explanation of terminology used in ATSB investigation reports is available here. This includes terms such as occurrence, contributing factor, other factor that increased risk, and safety issue. Publishing informationReleased in accordance with section 25 of the Transport Safety Investigation Act 2003 Published by: Australian Transport Safety Bureau © Commonwealth of Australia 2023
Ownership of intellectual property rights in this publication Unless otherwise noted, copyright (and any other intellectual property rights, if any) in this report publication is owned by the Commonwealth of Australia. Creative Commons licence With the exception of the Coat of Arms, ATSB logo, and photos and graphics in which a third party holds copyright, this publication is licensed under a Creative Commons Attribution 3.0 Australia licence. Creative Commons Attribution 3.0 Australia Licence is a standard form licence agreement that allows you to copy, distribute, transmit and adapt this publication provided that you attribute the work. The ATSB’s preference is that you attribute this publication (and any material sourced from it) using the following wording: Source: Australian Transport Safety Bureau Copyright in material obtained from other agencies, private individuals or organisations, belongs to those agencies, individuals or organisations. Where you wish to use their material, you will need to contact them directly. |
[1] For the purpose of this report a ‘return voyage’ describes the ship’s weekly round trip commencing northbound from Cairns, calling at Horn Island, Weipa and Thursday Island in that order and then returning to Cairns.
[2] Official paper nautical charts were the ship’s primary means of navigation required to be used onboard to meet the chart carriage requirements of the regulations.
[3] See the section titled Electronic Chart Systems (ECS).
[4] A master uses a night orders book to record instructions for bridge watchkeepers on duty while the master is resting overnight.
[5] The Great Barrier Reef and Torres Strait Vessel Traffic Service (REEFVTS) is operated by Maritime Safety Queensland as a Vessel Traffic Service (VTS) authority approved by the Australian Maritime Safety Authority (AMSA).
[6] All ship’s headings are reported in degrees true unless specified otherwise.
[7] One knot, or one nautical mile per hour equals 1.852 kilometres per hour.
[8] A nautical mile is 1,852 m.
[9] SEI provide details of ships that may be encountered whilst transiting the REEFVTS area and is calculated based on ship’s speed and route.
[10] Inmarsat-C is a two-way store and forward communication system transmitting messages from ship-to-shore, shore-to-ship and ship-to-ship, operated by telecommunications company Inmarsat.
[11] Parallel indexing is a real-time radar monitoring technique used to verify that the vessel is maintaining its intended track and will therefore pass a radar mark at a predetermined range.
[12] A cardinal mark is a navigation mark which indicates the safe side to pass hazards, such as rocks, reefs or shallow water. A west cardinal mark indicates that the safest water is to the west of the mark.
[13] At the time the ship was carrying 113,000 litres of diesel.
[14] Deballasting is the process of discharging a ship’s ballast (sea water held in ballast tanks) in order to increase its buoyancy and reduce its draught.
[15] The International Safety Management (ISM) Code requires a ship’s managers to have a designated person ashore (DPA) who should aim to ensure the ship’s safe operation and provide a link between all those on board and the highest level of management ashore.
[16] Under the Great Barrier Reef Marine Park Zoning Plan (2004) ships may only navigate within the designated shipping area (DSA) and the general use zones of the park. The DSA was put in place to help minimise impacts from shipping, while having regard for the shipping industry and Australia’s international obligations.
[17] A marine safety inspector may issue a prohibition notice that prohibits an activity that the inspector believes involves, or will involve, an immediate threat to the health and safety of any person or a serious risk to the environment.
[18] The ship’s length overall (LOA) is recorded as 81 m on the Australian registration certificate. However, the measured length is recorded as 79.82 m on the ship’s DCV certificate of survey, which is used to determine the level of crew qualifications required to operate the ship.
[19] DCV vessel compliance requirements are dictated by the category of service desired by the operator, and a vessel classed as 1C denotes a passenger vessel (13 or more passengers onboard) which can operate in restricted offshore operations (within 30 nautical miles from the baseline of the Australian mainland, including Tasmania).
[20] A vessel classed as 2B denotes a non-passenger vessel (with up to 12 passengers onboard) which can conduct offshore operations (within 200 nautical miles from the baseline of the Australian mainland, including Tasmania).
[21] Trinity Bay was certified to carry up to 50 berthed passengers and 14 crew under the 1C service category, and 12 berthed passengers and 14 crew under the 2B service category.
[22] Marine orders are legal instruments made by AMSA pursuant to powers under Commonwealth legislation. They are also described as regulatory instruments or legislative regulations.
[23] Differential global positioning systems are an enhanced form of GPS providing greater positioning accuracy than standard GPS.
[24] The TRANSAS Navigator ECS program did not comply with the requirements of the USL code, NSCV or MO 27 for an ECS and did not use official electronic navigation charts (ENCs).
[25] A voyage data recorder is designed to collect and store data from various shipboard systems in compliance with SOLAS requirements.
[26] Certain DCVs less than 35 m in length could be equipped with an ECS that was compliant with the National Standard for Commercial Vessels’ (NSCV) standards for navigation equipment. However, all DCVs greater than 35 m in length were required to comply with Marine Order 27’s (MO 27) carriage requirements for shipborne navigational systems and equipment, which stated that if ENCs were used on board, they had to be displayed on a compliant ECDIS.
[27] A Master <80 m certificate of competency authorises the holder to command or act as Chief Mate or deck watchkeeper of a DCV less than 80 m in length and operate to the outer limits of the Australian exclusive economic zone (EEZ).
[28] A Mate <80 m certificate of competency authorises the holder to act as second in command of a DCV less than 80 m in length and operate to the outer limits of the Australian EEZ.
[29] Australian Maritime Safety Authority, 2018, Marine Order 504 – Certificates of operation and operation requirements - national law, AMSA, Canberra.
[30] International Maritime Organization, 2018, International Management Code for the Safe Operation of ships and for Pollution Prevention (ISM Code) as amended, IMO, London
[31] International Maritime Organisation (IMO), 1974, The International Convention for the Safety of Life at Sea, 1974, as amended (SOLAS 1974), Chapter V, regulation 34 Safe navigation and avoidance of dangerous situations, IMO, London.
[32] International Maritime Organisation (IMO), 1999, Resolution A.893(21) Guidelines for voyage planning, IMO, London.
[33] International Maritime Organisation (IMO), 1974, The International Convention for the Safety of Life at Sea, 1974, as amended (SOLAS 1974), Chapter V, Annex 23 Voyage Planning, IMO, London.
[34] Australian Maritime Safety Authority, 2019, Marine Order 63 (Vessel reporting systems) 2019, AMSA, Canberra.
[35] A vessel traffic image, or integrated surface picture, is a visual representation of the position and movement of vessels on a geographic information system.
[36] A level 2 fault was defined as: Severity 2 (Major) - The VTS DST solution is not fit for operational use with this defect unresolved. Resolution of this defect will be required prior to the VTS DST solution being fit for operational use. Business impact is high.
[37] All vessels 50 m or greater in length, tankers of any size and tug and tows with a tow greater than 150 m in length.
[38] The Navigation Act 2012 requires ships over 70 m in length, loaded oil tankers, loaded chemical carriers, and loaded liquefied gas carriers (irrespective of length) to embark a licensed coastal pilot when transiting coastal pilotage areas.
[39] The Whitsundays (Whitsunday Passage, Whitsunday Group and Lindeman Group) and the Inner Route (from Cape York to Cairns).
[40] The Torres Strait and the Great North East Channel (GNEC).
[41] Australian Maritime Safety Authority, 2014, Marine Order 54 (Coastal pilotage) 2014, AMSA, Canberra.
[42] Prescribed information means information that is required to be furnished in accordance with legislation. In this instance, prescribed information included information such as the name of the compulsory pilotage area for which the exemption was proposed, the names and addresses of the ship’s owner and applicant, the vessel’s name, type, IMO number, flag, principal dimensions, draught, hull material and other relevant information.