What happened
On the afternoon of 10 April 2018, the 45.5 m landing craft Lauren Hansen was being prepared for sea at Hudson’s Creek, Darwin, Northern Territory. The ship’s operator, Shorebarge, had chartered the ship for a voyage to Elcho Island.
By about 1450 Central Standard Time[1] that afternoon, the ship’s crew had completed taking on fuel and had departed the ramp at Hudson’s Creek with a maximum draft of about 2.2 m. The ship’s cargo consisted of forklift machinery, construction material, a 20-foot container and other general cargo.
As the ship proceeded out of Darwin Harbour, the master encountered difficulties using the autopilot, which when engaged, applied port rudder regardless of the heading order set on the control panel. The master steered the ship manually until they had departed port limits at about 1705, at which time the master attempted to engage the autopilot again with limited success. Shortly after departing port limits, Lauren Hansen encountered engine difficulties with the fault traced to the starboard main engine’s gearbox cooling system. At about 1900, the ship’s crew dropped anchor to the south-west of the Vernon Islands while the gearbox cooling system fault was rectified. By about 2115, with both main engines operational again, Lauren Hansen weighed anchor and resumed passage for Elcho Island.
At about 2200, the master handed over the navigation watch to the chief mate and retired to his cabin located on the deck below the navigation bridge (bridge). At that time, the ship was on autopilot and the chief mate was the sole watchkeeper on the bridge. The weather was fine with partly cloudy skies, a north-westerly wind at force one[2] (10 knots or less) and calm seas.
At about 0200 on 11 April 2018, Lauren Hansen was on a course of about 042º with a speed of about 9.7 knots, with Cape Keith about 2 nautical miles (NM) to the north. At about 0213, the ship approached a planned course alteration position (waypoint) laid about 0.9 NM off the coast of Cape Keith, Melville Island. At the time, the ship was on a heading of about 043º with a speed of about 9.6 knots. The chief mate reported that he altered the ship’s heading by about 10° to port using the autopilot and that the ship appeared to settle on the new heading.
At some time between 0213 and 0218, the ship commenced an unexpected turn to port, towards land, without any alarms or indications. Shortly after, the chief mate, who was monitoring the chart plotter[3] and radar, noticed that the ship had started to turn to port. He reduced power on both main engines and attempted to call the master using the bridge telephone. Failing to receive a response using the telephone, the chief mate then left the bridge and went down to the master’s cabin, one deck below. He alerted the master to the situation and both then returned to the bridge. As the master and chief mate entered the bridge, they noticed that the ship no longer appeared to be turning but had steadied on a north-westerly heading. At about the same time, Lauren Hansen grounded on a shoal about 170 m off the shoreline on Cape Keith, Melville Island (Figure 1). The grounding was logged in the ship’s bridge logbook as having occurred at 0230.
As the crew were mustered, the master lowered the ship’s bow door in an attempt to adjust the ship’s trim and used the main engines in an unsuccessful attempt to re-float the ship. The crew then started to sound the ship’s tanks and bilges in attempt to detect any hull breaches or water ingress. After the initial inspection, no damage, hull breaches or environmental pollution was evident. The master assessed that the ship was not in any imminent danger and did not activate the ship’s EPIRB[4] or broadcast a distress, safety or urgency message on the radio.
Figure 1: Lauren Hansen's track and location of grounding
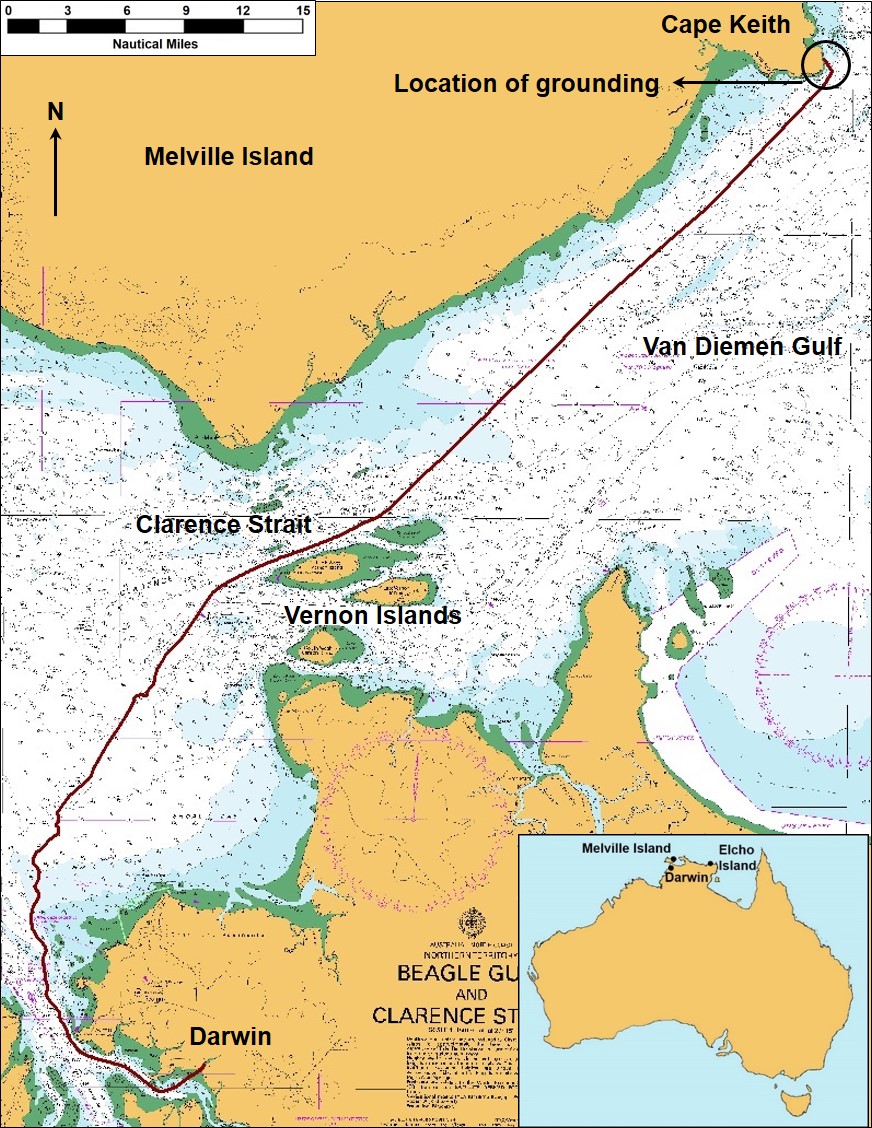 Source: Australian Hydrographic Service, annotated by the ATSB using electronically recorded data
Source: Australian Hydrographic Service, annotated by the ATSB using electronically recorded data
As the tide ebbed, the ship remained aground in an upright position with the propellers and rudders relatively unaffected in deeper water at the ship’s stern (Figure 2). The crew continued to sound the ship’s tanks and bilges on a 2-hour basis throughout the duration of the grounding.
At about 0700, the master informed the company’s designated person ashore (DPA)[5] of the incident using the ship’s Inmarsat-C satellite telephone (sat-phone). The DPA then initiated notifications to the ship’s owners, insurers, Australian Maritime Safety Authority (AMSA), class and other stakeholders. At about 0745, the DPA contacted the ship on the sat-phone to get more details and formulate a plan. The master advised the DPA that the ship was expected to re-float at about 1330 that afternoon, on the rising tide, at which point the ship would proceed back to Darwin for an underwater inspection.
Figure 2: Lauren Hansen aground off Cape Keith
 Source: Shorebarge
Source: Shorebarge
At about 1200, the DPA attempted to contact the ship on the sat-phone with no success. Further attempts to establish communications with the ship between 1300 and 1430 also failed. On board Lauren Hansen, attempts by the master to contact the DPA on the sat-phone were similarly unsuccessful.
At about 1400, Lauren Hansen re-floated. The ship’s tanks and bilges were sounded and with no breaches or water ingress evident, the ship commenced passage back towards Darwin.
Meanwhile, at about 1445, the ship’s operator authorised the use of a helicopter for the DPA to attempt to locate the ship and re-establish communications. At about 1600, the DPA departed Darwin in a Robinson R22 helicopter with a portable sat-phone on board. At about 1645, the DPA located Lauren Hansen while the vessel was en-route returning to Darwin. The portable sat-phone was lowered to the ship, communications re-established and the helicopter returned to Darwin.
By about 2300 that evening, Lauren Hansen had safely anchored in Darwin Harbour.
At about 1330 the next day, 12 April 2018, divers conducted an underwater inspection of the ship’s hull. A surveyor representing the ship’s classification society, American Bureau of Shipping, also attended the inspection. The underwater inspection identified several areas of impact damage across the ship’s bow with the largest indentation about 143 cm long, 50 cm wide and about 8 cm deep. While all the damaged areas had sustained hull distortion and indentations, no cracks, fractures or tears in the hull were evident.
Surveyors from AMSA attended Lauren Hansen on 13 April 2018 and detained the ship pending the class surveyor’s report. The damaged areas of the ship’s hull were checked by internally inspecting the ship’s affected tanks and spaces. Following this, the class surveyor issued a survey report recommending the damaged areas be repaired during the ship’s next dry-docking survey on 25 June 2018. AMSA subsequently lifted the detention order on the provision that the class survey report’s recommendations were adhered to by the prescribed date.
Crew
Lauren Hansen’s crew of five Australian nationals comprised a master, chief mate, chief engineer and two other crew. The master held an Australian master’s certificate of competency and had about 33 years’ experience at sea with at least 7 years as master on board Lauren Hansen.
The chief mate also held an Australian master’s certificate of competency with about 16 years at sea and had joined Shorebarge about 9 months before the grounding. In that time, the chief mate had served on board Lauren Hansen, among other vessels, and was familiar with the use and operation of the ship’s navigation and steering systems. Records of rest hours and interview evidence indicated that at the time of the grounding (0230), the chief mate had been awake for about 20 hours.
Lauren Hansen
At the time of the grounding, Lauren Hansen was an Australian registered, 45.5 m landing craft owned by Teras Offshore, Singapore and chartered by Shorebarge. The ship was under charter to Shorebarge from about June 2017 to 8 March 2018. The ship then lay idle until 10 April 2018 when it was once again chartered by Shorebarge for the voyage to Elcho Island.
Lauren Hansen was equipped with the required navigation equipment for a ship of its class including radar, magnetic compass, echo sounder, automatic identification system (AIS),[6] bridge navigational watch alarm system[7] and global positioning system receiver units. The ship’s bridge navigational watch alarm system was reported to be operational and active at the time of the grounding. The ship was also equipped with autopilot, chart plotter and a satellite compass.[8] The ship was not equipped with a voyage data recorder nor was it required to be. The ship’s propulsion was provided by two Cummins KT-19 M3 marine diesel engines driving twin propellers with steering by means of twin rudders driven by an electro-hydraulic steering gear system.
Lauren Hansen’s passage plan for the voyage comprised a route that passed north of the Vernon Islands through the Clarence Strait and thence north-easterly through the Van Diemen Gulf. The planned route took the ship close to the coast of Melville Island with a waypoint laid about 0.9 NM off land in the vicinity of Cape Keith (Figure 3). Navigational charts for the area included a recommended track further to the east in more open waters but it was not used. The ship’s master indicated that, generally, passages through the Van Diemen Gulf were laid close inshore off the coast of Melville Island and that this route had proved to be safe and reliable in the past. He also stated that the chart’s recommended track was not used as experience had shown that the southern section, passing south of the Vernon Islands (see Figure 1), was subject to strong and at times, unpredictable, tidal influences.
Figure 3: Section of navigational chart Aus 720 showing Lauren Hansen's planned track (in red) and the recommended track (in purple)
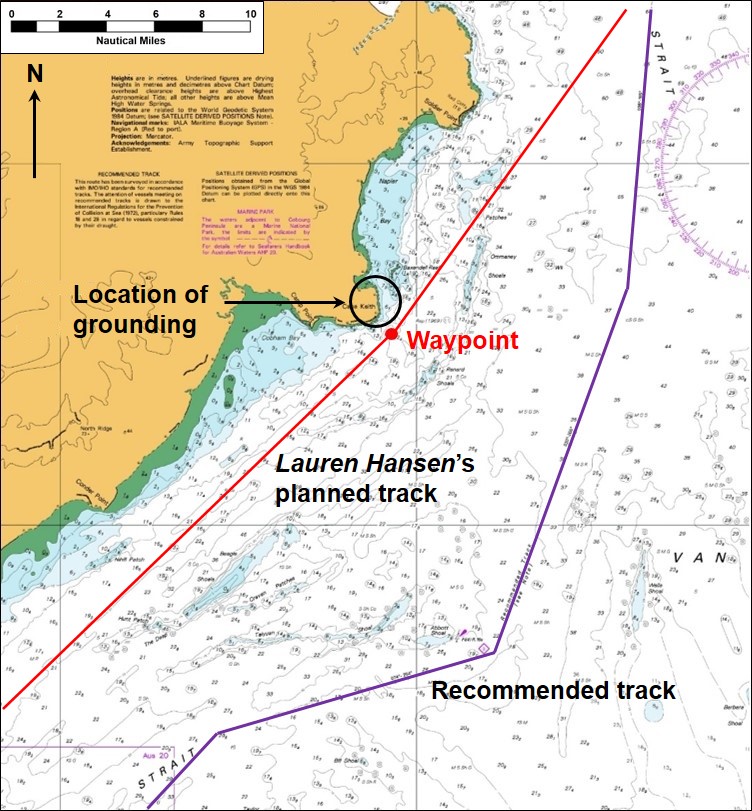 Source: Australian Hydrographic Service, annotated by the ATSB
Source: Australian Hydrographic Service, annotated by the ATSB
Furthermore, AIS data indicated that Lauren Hansen was probably about 0.3 NM to port of the planned route and therefore, about 0.6 NM off land at about 0213, when the course alteration was performed (Figure 4).
Figure 4: Section of navigational chart Aus 720 showing Lauren Hansen's approximate track with AIS derived positions (in brown)
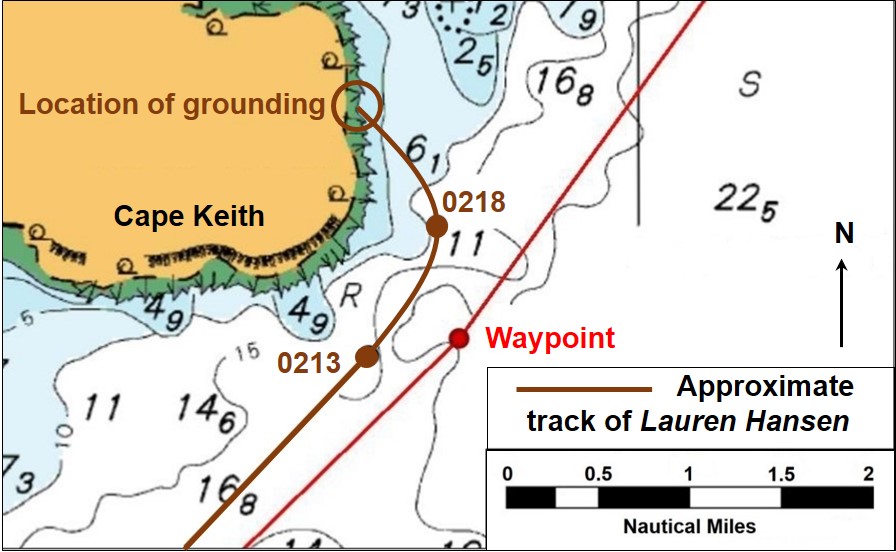 Source: Australian Hydrographic Service, annotated by the ATSB using AIS data provided by AMSA
Source: Australian Hydrographic Service, annotated by the ATSB using AIS data provided by AMSA
Steering systems and heading data
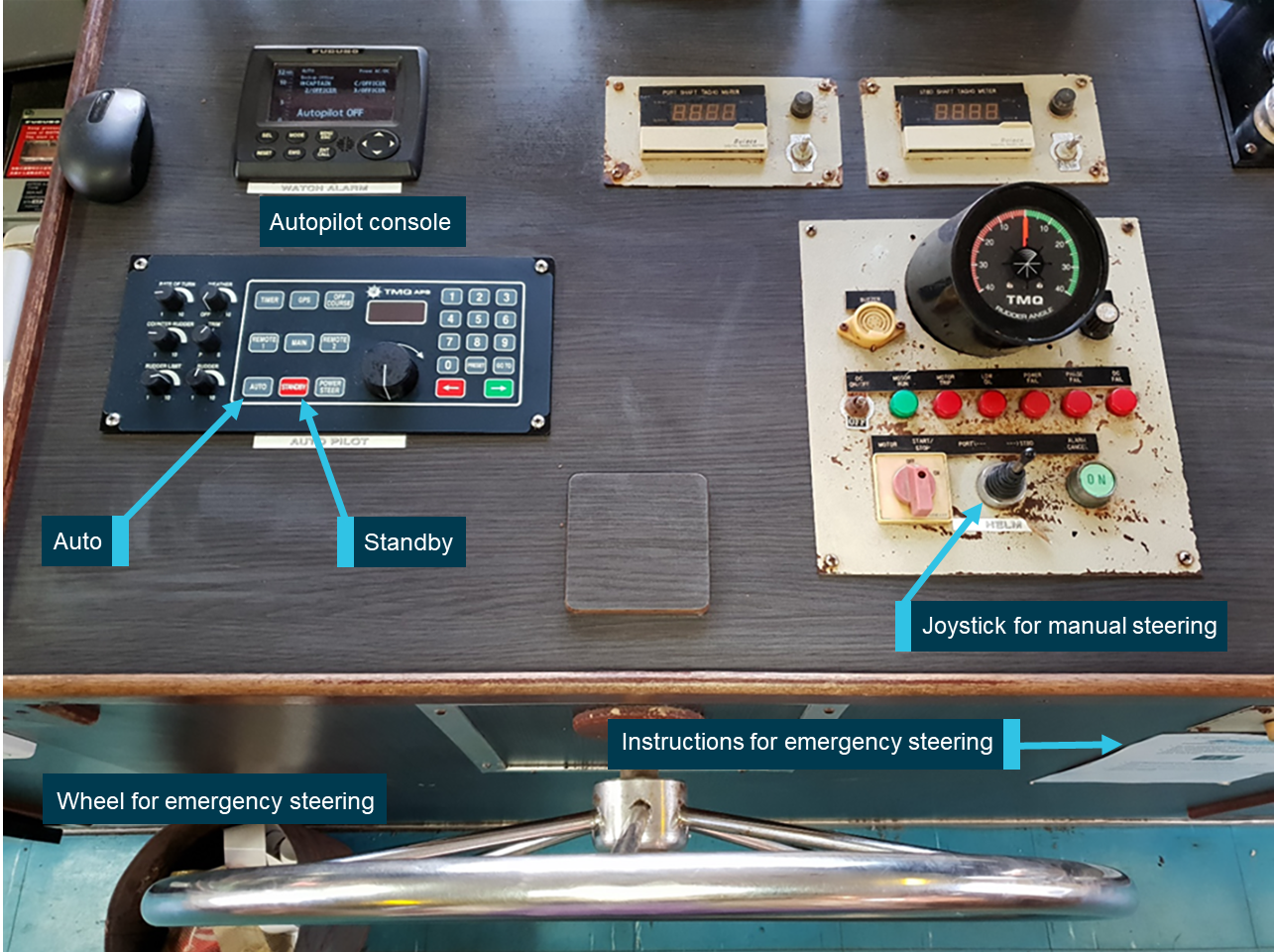
On Lauren Hansen’s bridge, there were three primary modes of steering—autopilot, manual steering and emergency steering (Figure 5).
The ship’s autopilot was an AP-9 autopilot manufactured by TMQ International. To engage the autopilot steering mode, the ‘AUTO’ button was pushed and the ‘AUTO’ light would come on. The heading order was then set using the rotary knob or the keypad buttons and the autopilot would be ‘locked’ to steer the set heading shown on the autopilot display.
In order to change to manual steering mode, the ‘STANDBY’ button had to be pushed. The ‘AUTO’ light would go off and the ‘STANDBY’ light would come on. The ship would now be in manual steering mode using the joystick on the helm console. The display on the autopilot would now show the ship’s current heading.
Emergency steering on board Lauren Hansen was conducted from the ship’s bridge. The changeover procedure to emergency steering mode involved turning the autopilot off and then on again before opening two hydraulic changeover valves located in a cupboard on the bridge. Emergency steering was then carried out using the ship’s wheel. The instructions for the changeover to emergency steering were laid out in a laminated notice and affixed to the helm console on the bridge.
Heading reference information was fed to the autopilot from the ship’s magnetic compass through a compass top sensor (CTS) unit.
Figure 5: Helm console on Lauren Hansen's bridge
 Source: Shorebarge
Source: Shorebarge
Magnetic compass
Lauren Hansen was fitted with a Daiko Keiki SR2-150PK magnetic reflector compass unit and a spare compass bowl as required by the regulations.
While the ship was also equipped with a satellite compass, past experience on board had shown this to be unreliable as a heading reference system for the autopilot. The magnetic compass was therefore substituted to feed heading information to the autopilot using a heading sensor unit sometime in 2017. There were no records available to show exactly when or how this changeover was performed.
Under AMSA regulations,[9] Lauren Hansen was required to have available, a table or curve of the residual deviations from the last compass adjustment and for compass deviations to be regularly calculated and recorded in a compass deviation book. The magnetic compass on board Lauren Hansen had last been adjusted by a licensed compass adjustor about 4.5 years previously in September 2013. The deviation table from this adjustment was available on board. There was no minimum statutory period for when Lauren Hansen’s compass needed to be re-adjusted provided: it was kept in good condition, a compass deviation book was maintained, and the deviation on all headings was less than 5º.
However, there was no evidence of a compass deviation book being maintained on board Lauren Hansen, as required by the regulations, and therefore, no recent compass deviations available for inspection.
Operator’s investigation
Lauren Hansen’s autopilot had been repaired at least twice in the 6 months prior to the incident, once in November 2017 and again in February 2018. In both instances, the faults were found to involve corrosion in the unit’s circuit boards and switches.
On 13 April 2018, Shorebarge engaged a technician to investigate the autopilot malfunction that occurred prior to the grounding. During the technician’s inspection, when the autopilot unit was powered up, the display showed a heading of about 307º whereas the magnetic compass indicated a heading of about 225º, which more accurately represented the true orientation of the ship’s head. Over the next hour, as the technician checked the magnetic compass and the CTS unit, the heading on the autopilot unit display slowly settled until it accurately reflected the magnetic compass heading. The technician was unable to recreate the fault and concluded that it was possible that there was an intermittent fault in either the autopilot unit or the CTS unit. Both units were replaced after the incident on 18 April 2018.
Similar past incidents
St Apollo
On 24 August 2015, the scallop dredger St Apollo grounded on a rocky shelf at the eastern entrance to the Sound of Mull, Scotland, United Kingdom. St Apollo had been entering the Sound of Mull in autopilot steering mode when, soon after a course alteration, the watchkeeper reported the vessel turning to starboard. The watchkeeper reduced the engine speed and went to the ship’s mess, just aft of the wheelhouse, from where he called out to the skipper, asleep one deck below. As the skipper arrived in the wheelhouse, St Apollo grounded. The skipper and four crew were recovered safely and there was no significant pollution but the ship was declared a constructive total loss.
The United Kingdom’s Marine Accident Investigation Branch Report No. 14/2016 concluded that the grounding was due to navigational error, equipment malfunction or both. It also found that while the cause of the reported loss of heading control could not be determined, the reactions of the watchkeeper were impaired by insufficient situational awareness, lack of equipment knowledge and a low state of arousal.
Safety analysis
During the ship’s passage from Darwin, the ship’s master encountered problems using the autopilot. The ship’s course appeared to, intermittently, deviate to port whenever the autopilot was engaged requiring the master to use manual steering. As the passage progressed, the master was able to re-engage the autopilot before eventually handing over the watch to the chief mate who was aware of the previous day’s autopilot issues. The planned route for the passage was laid less than 1 NM off land in the vicinity of Cape Keith in the Van Diemen Gulf. The navigation chart’s recommended track for the area lay further east, about 9 NM off land. An amendment to the planned route to pass further to the east of Cape Keith, similar to the recommended track, would have allowed more time and sea room to react to a navigational challenge such as an autopilot malfunction and reduced the risk of a grounding.
As Lauren Hansen approached the waypoint off Cape Keith, the AIS data indicated that the ship was likely about 0.3 NM to port of the planned route. The chief mate, who was on watch, then successfully executed a course alteration to port using the autopilot and continued to monitor the ship’s progress on the chart plotter and radar. Shortly after the course alteration, with the ship less than 1 NM off land, the chief mate reported observing the ship turn unexpectedly to port towards shallow water and land. The chief mate then reduced power on the ship’s engines to slow the ship’s progress towards land and attempted to alert the master for assistance. A changeover to either manual or emergency steering at this time would have enabled the chief mate to reassert control over the ship’s steering system and direct the ship away from land. Leaving the autopilot engaged while carrying out other actions meant that the ship continued to make way towards shallow water and subsequently grounded.
The chief mate was qualified, experienced and was familiar with the changeover and use of the ship’s manual steering. Reducing power on the ship’s engines and calling the master were both valid actions taken by the chief mate in response to the potential developing emergency. However, the chief mate’s response did not include the key step of assuming manual steering, which would have been the most effective way of preventing the grounding. This oversight may have been related to the sudden realisation of the unfolding potential emergency at a time of low arousal due to the combination of his circadian rhythm (early morning) and time awake (about 20 hours).
When turned on during the post-incident technical inspection, the autopilot unit’s heading display showed a heading discrepancy between the supplied heading information and the magnetic compass heading at the time. The observed heading discrepancy appeared to be consistent with the previously observed steering deviations. The post-incident technical inspection concluded that the autopilot malfunction was possibly the result of an intermittent fault in either the CTS unit or the autopilot unit itself.
While the magnetic compass appeared to have been performing satisfactorily, there was no compass deviation book being maintained on board Lauren Hansen, as required by the regulations. The performance of a ship’s magnetic compass can be affected by several factors such as the nature of the ship’s cargoes and periods of inactivity. At the time of the grounding, Lauren Hansen had been laid up for a period of about a month and even short periods of idleness can lead to serious deviations for a ship’s magnetic compass.[10] However, without a compass deviation book there was no record of regular compass deviation calculations and therefore, no means of monitoring the compass’s performance.
Findings
These findings should not be read as apportioning blame or liability to any particular organisation or individual.
- The decision to execute the planned route, which passed close to land, rather than a route in more open waters similar to the chart's recommended track through the Van Diemen Gulf, increased the risk of a grounding particularly when the unreliability of the autopilot was a known factor.
- Lauren Hansen experienced an unexpected turn to port while on passage in autopilot steering mode. The ship’s manual or emergency steering modes were not engaged or utilised and the ship subsequently grounded.
- The unexpected turn to port was most likely the result of an intermittent fault in the ship's autopilot unit or in the compass top sensor unit that fed heading information to the autopilot unit.
- There was no compass deviation book maintained on board Lauren Hansen as required by Australian Maritime Safety Authority regulations.
Safety action
Whether or not the ATSB identifies safety issues in the course of an investigation, relevant organisations may proactively initiate safety action in order to reduce their safety risk. The ATSB has been advised of the following proactive safety action in response to this occurrence.
Shorebarge
As a result of this incident, the ship’s operator has advised the ATSB that they are taking the following safety actions:
Repairs and replacement
The autopilot unit and compass top sensor were both replaced with new units, with the autopilot now reported to be functioning normally. The ship has since been dry-docked and repairs and replacement of the damaged hull areas have been carried out as recommended by class.
Magnetic compass adjustment
Lauren Hansen’s magnetic compass was inspected by a qualified compass adjustor and an up-dated table of deviations compiled. The compass was found to have been operating satisfactorily with deviations on all headings less than 5º.
Shipboard safety meetings
Safety meetings were conducted on board Shorebarge vessels to review the grounding and to discuss the management of fatigue. The discussion included a review of AMSA’s legislative requirements and the company’s procedures for fatigue management.
Safety message
The steering gear and associated control systems including the autopilot, compass and sensor units are, along with the ship’s propulsion system, the primary means of controlling the conduct of the ship. Any malfunction or suspected unreliability in these systems should be an immediate cause for concern.
This incident showed the implications of a failure or malfunction of any aspect of the ship’s steering systems and that these should be carefully assessed before committing a vessel to sea. If necessary, the situation should be rectified or measures implemented to reduce risk before the vessel embarks on a voyage. In this case, with prior knowledge of the autopilot’s unreliability, the passage plan or master’s orders could have mandated that manual steering be assumed when navigating in confined waters or in proximity to land. This would have prevented undue reliance being placed on the autopilot, especially in areas where there was limited time or options for action in the event of a malfunction. Alternatively, laying the planned track in more open waters, similar to the recommended track on the navigational charts in use, would have allowed more sea room in the event of a steering malfunction.
This investigation also provides an opportunity to highlight the necessity for magnetic compasses to be maintained, monitored and adjusted as required by the regulations. The need to monitor the performance of a magnetic compass is especially important when it is used as the primary source of heading information for the ship’s steering systems. While, in this case, the magnetic compass appears to have been performing satisfactorily, a record of regular compass deviation checks allows the performance of a compass to be monitored and therefore, adjusted when necessary. Further guidance on the maintenance and adjustment of magnetic compasses can be found in Marine Notice 19/2016 – Maintenance and Adjustment of Magnetic Compasses published by the Australian Maritime Safety Authority.
Ship details
| Name: | Lauren Hansen |
| IMO number: | 9580869 |
| Call sign: | VZXU |
| Flag: | Australia |
| Classification society: | American Bureau of Shipping |
| Ship type: | Landing craft |
| Builder: | Far East Shipyard Company, Malaysia |
| Year built: | 2010 |
| Owner(s): | Teras Offshore |
| Manager: | Shorebarge |
| Gross tonnage: | 490 |
| Deadweight (summer): | 490 t |
| Summer draught: | 2.5 m |
| Length overall: | 45.5 m |
| Moulded breadth: | 11 m |
| Moulded depth: | 3.2 m |
| Main engine(s): | Cummins KTA19-M3 |
| Total power: | 640 HP |
| Speed: | 11 knots |
| Damage: | Hull indentations and distortion across underwater bow area |
Purpose of safety investigationsThe objective of a safety investigation is to enhance transport safety. This is done through:
It is not a function of the ATSB to apportion blame or provide a means for determining liability. At the same time, an investigation report must include factual material of sufficient weight to support the analysis and findings. At all times the ATSB endeavours to balance the use of material that could imply adverse comment with the need to properly explain what happened, and why, in a fair and unbiased manner. The ATSB does not investigate for the purpose of taking administrative, regulatory or criminal action. TerminologyAn explanation of terminology used in ATSB investigation reports is available here. This includes terms such as occurrence, contributing factor, other factor that increased risk, and safety issue. Publishing informationReleased in accordance with section 25 of the Transport Safety Investigation Act 2003 Published by: Australian Transport Safety Bureau © Commonwealth of Australia 2018
Ownership of intellectual property rights in this publication Unless otherwise noted, copyright (and any other intellectual property rights, if any) in this report publication is owned by the Commonwealth of Australia. Creative Commons licence With the exception of the Coat of Arms, ATSB logo, and photos and graphics in which a third party holds copyright, this publication is licensed under a Creative Commons Attribution 3.0 Australia licence. Creative Commons Attribution 3.0 Australia Licence is a standard form licence agreement that allows you to copy, distribute, transmit and adapt this publication provided that you attribute the work. The ATSB’s preference is that you attribute this publication (and any material sourced from it) using the following wording: Source: Australian Transport Safety Bureau Copyright in material obtained from other agencies, private individuals or organisations, belongs to those agencies, individuals or organisations. Where you wish to use their material, you will need to contact them directly. |
__________
- All times referred to in this report are local time, Coordinated Universal Time (UTC) + 9.5 hours.
- The Beaufort scale of wind force, developed in 1805 by Admiral Sir Francis Beaufort, enables sailors to estimate wind speeds through visual observations of sea states.
- A device used in marine navigation that integrates GPS data with an electronic navigational chart. It displays the electronic chart along with the position, heading and speed of the ship.
- EPIRB – Emergency Position Indicating Radio Beacon.
- The International Safety Management (ISM) Code requires a ship’s managers to have a Designated Person Ashore (DPA) who should aim to ensure the ship’s safe operation and provide a link between all those on board and the highest level of management ashore.
- The automatic identification system (AIS) is a very high frequency (VHF) radio-broadcasting system which enables AIS equipped vessels and shore-based stations to send and receive identifying information.
- A mandatory system, the bridge navigational watch alarm system (BNWAS) automatically alerts the master or another qualified officer if the officer of the watch becomes incapable of performing the officer of the watch’s duties for any reason such as falling asleep or becoming otherwise incapacitated.
- A satellite compass uses the difference between the recorded positions of two or sometimes three GPS antennas fitted to a vessel to compute the ship’s heading.
- Australian Maritime Safety Authority, 2016, Marine Order 27 – Safety of navigation and radio equipment, AMSA, Canberra.
- Australian Maritime Safety Authority, 2016, Marine Notice 19/2016 – Maintenance and adjustment of magnetic compasses, AMSA, Canberra.