Safety summary
What happened
On 15 May 2016, at approximately 1056 Australian Eastern Standard Time (AEST), an unmanned ‘675 J class’ tram (‘J’ class) collided with a ‘1054 Nagasaki’ tram (Nagasaki) at Sydney Tramway Museum (STM) in Loftus, New South Wales. The Nagasaki was approaching Loftus after completing a tourist operation between Sutherland and Loftus, when the crew noticed the unmanned ‘J’ class moving towards them on the same track. The crew responded by stopping the Nagasaki and evacuated all 16 passengers safely before the collision occurred.
What the ATSB found
The ATSB found that the ‘J’ class was parked on a downhill gradient towards Sutherland prior to the runaway and collision. It was also found that the tram’s handbrake had not been applied and instead, a hardwood wheel chock had been placed under the tram’s front wheel to restrain the vehicle’s movement.
What's been done as a result
Since the incident, STM has adopted a number of changes to manage the risk of tram runaway. These include but are not limited to the following:
- STM has made the application of handbrakes mandatory.
- STM’s Safety Management System (SMS) now requires trams to be stabled on level track.
- STM has included yellow markings to delineate level track from a descending gradient.
- STM has stopped using hardwood wheel chocks to stable its trams.
Safety message
Rolling Stock Operators need to consider the limitations of rolling stock brake systems, including brake retention times, when designing stabling procedures and locations to park rolling stock.
The risk of rolling stock runaway should be assessed, taking into account the context of the organisations railway operations, and should examine all existing and available risk controls.
Additionally, any changes made to a risk control should follow a change management process to ensure that the change does not reduce the risk control’s effectiveness.
Figure 1: 675 ‘J’ class and 1054 ‘Nagasaki’ class tram collision

Source: ATSB
At 0815 on the day of the incident, the driver and a second crew member signed on for work and boarded the Nagasaki tram in readiness for a tourist service. The crew completed the required pre-operation safety checks and moved the tram out of the running shed area (Figure 3). It was then halted at a stop board outside the running shed where the Nagasaki’s horn was sounded twice in accordance with STM’s procedures.
Figure 2: Incident location at Loftus
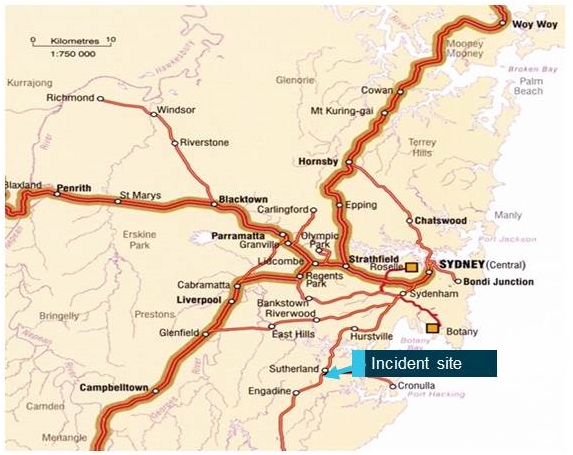
Source: Geoscience Australia, annotated by the ATSB
The crew then moved the Nagasaki in the Down[1] direction towards the Royal National Park (RNP) and stopped just before the Princes Highway level crossing (Figure 3). At the level crossing, the crew completed an inspection of the level crossing lights and prepared to move the Nagasaki in the Up direction (towards Sutherland) to the Railway Square Waiting Shed (RSWS) (Figure 3). While the crew of the Nagasaki were at the level crossing, another tram (611 ‘Y’ class) departed the running shed with two crew members on board. The ‘Y’ class was moved adjacent to the RSWS to on-load passengers for its operation to Sutherland and then the following journey to the RNP (Figure 3). Soon after this, the Nagasaki was moved from the level crossing and parked behind the ‘Y’ class.
Another tram (‘J’ class) also departed the running shed to the RSWS and was parked behind the Nagasaki (Figure 4). The ‘J’ class driver applied the air brakes[2] but did not apply the handbrake when stabling it adjacent to the RSWS which was on a level gradient. A single hardwood wheel chock was placed under the ‘J’ class’s left-hand leading wheel.
Figure 3: Yellow dotted line shows the depot mainline, red dotted line shows bidirectional lines, and blue dotted line shows the Up and Down mainlines at Loftus

Source: Google maps, annotated by the ATSB
The first tram in the sequence (‘Y’ class) departed for Sutherland at approximately 1005 and returned to Loftus at approximately 1013. The ‘Y’ class then departed for the RNP at approximately 1015.
Figure 4: Sequence of trams parked before the ‘Y’ class departed to Sutherland

Source: Sydney Tramway Museum, annotated by the ATSB
The ‘Y’ class returned to Loftus from the RNP at approximately 1040. It was then parked behind the ‘J’ class, which was parked behind the Nagasaki. At approximately 1048, the Nagasaki departed for Sutherland with 16 passengers and two crew members on board.
The track from Loftus to Sutherland begins as a double line track (Up and Down mainline) and then merges into a single bidirectional line further towards Sutherland (Figure 3). The safeworking system implemented on the bidirectional line was ‘staff and ticket’[3]. The Nagasaki driver was provided a staff (metal token) before departing in the Up direction towards Sutherland. This provided Nagasaki with exclusive access to the bidirectional line for that journey in the Up direction.
At approximately 1050, the ‘J’ class was moved forward towards Sutherland and parked just before Cross St junction to line up with a kerb (Figure 5). The air brakes were used to stop the tram however, the handbrake was not applied. In lieu of the handbrake, a STM staff member placed the hardwood wheel chock used previously under the front left-hand wheel of the ‘J’ class. The ‘J’ class was parked on a falling gradient facing towards Sutherland with the control key removed and was left unattended.
Figure 5: Sequence of trams parked while the Nagasaki tram was heading to Sutherland

Source: Sydney Tramway Museum, annotated by the ATSB
Shortly after arriving at Sutherland, the Nagasaki departed at approximately 1054 on its return trip to Loftus.
At approximately 1055, a STM staff member noticed that the unmanned ‘J’ class had begun to roll down the falling gradient towards Sutherland. The ‘J’ class left the Up mainline and crossed onto the bidirectional line towards Sutherland (Figure 3). The ‘J’ class then headed towards the Nagasaki that was travelling in the opposite direction on the same line.
As the crew of the Nagasaki negotiated a small curve, they noticed the unmanned ‘J’ class heading towards them. The Nagasaki driver immediately applied the emergency brake, which brought the Nagasaki to a halt. The driver then instructed all passengers to evacuate immediately and opened all doors. The crew assisted passengers to exit the Nagasaki as quickly as possible. All passengers and crew had exited the Nagasaki safely before the ‘J’ class collided with the Nagasaki.
The ‘J’ class had travelled in an unmanned state for approximately 283 m. Marks on the rail indicated that the collision force moved the ‘Nagasaki’ 13.5 m back towards Sutherland.
As a result of the collision, there was minimal damage to the steel-bodied exterior of the Nagasaki. The ‘J’ class’s floor hoist (support) was compressed and the wooden floor panels were damaged. The front exterior face of the ‘J’ class was damaged and broken wood was observed within and around the trams (Figure 6).
Immediately after the impact, the crew confirmed that there were no injuries and checked that all passengers had exited the Nagasaki. The driver then reported the incident to the STM shift manager. While waiting for assistance, the crew secured the Nagasaki by disconnecting its power feed pole and applying the service brake and handbrake.
Figure 6: Damage to the 675 ‘J’ class tram

Source: ATSB
__________
- Down direction: Facing away from Sutherland, Up direction: Facing towards Sutherland.
- Air brakes: A braking system which uses air pressure to stop or slow the tram.
- ‘Staff and ticket’ is a method of safeworking where trams are given exclusive entry into a track section only if the driver is provided a unique staff (metal token) or observes the unique staff and is provided a ticket.
This section examines the failed risk controls and likely contributing factors that resulted in the ‘J’ class running away unmanned and colliding with Nagasaki tram.
675 ‘J’ class tram braking systems
Air brake system
The ‘J’ class service brake uses a manual lapping air brake system. This system uses air pressure to stop or slow the tram. It functioned by directing air from a main air reservoir through a main brake pipe to driver controlled air valves. On command by the driver, the air valves direct a volume of pressurised air into the brake cylinder. The air pressure within the cylinder extends the brake cylinder rod, applying a force through the brake rigging and onto the brake shoes. Friction braking occurs when the brake shoes contact the wheel tread face on all four wheels (Figure 7). The driver may increase braking effort by feeding more air into the brake cylinder and similarly reduce it by releasing air. An electrically powered air compressor provides compressed air to the main air reservoir. A pressure sensitive switch will automatically stop and start the compressor to maintain the brake pipe pressure.
The driver control for the air valves on the ‘J’ class had three positions. These were:
- Release (releases air from the brake cylinder) – Turned right.
- Lap (does not release or feed any air into the brake cylinder) – Middle position.
- Brake (feeds air into brake cylinder) – Turned left.
The manual lapping air brake system on the ‘J’ class does not retain air in its brake cylinder indefinitely. In the lap position, air gradually releases from the system and braking effort reduces over time after application. Therefore, a service brake application is not suitable as a park brake. This is different to a self-lapping air brake system where the air valve automatically feeds air into the system as brake cylinder pressure.
At approximately 1050, the ‘J’ class was parked adjacent to Cross St junction on a falling gradient with the air brakes applied and the driver controlled air valve in the lap position. The ‘J’ class was then left unattended. Air within the brake system likely released, which gradually reduced the ‘J’ class’ available braking effort. The braking effort holding the ‘J’ class from moving likely reduced to a point where the brake could not hold the mass of the tram on the downhill gradient and relied on the chock to restrain its movement. At approximately 1055, the ‘J’ class started to roll down the gradient.
The time between brake application and the tram rolling down the grade suggested the retention time of air within the brake cylinder was less than five minutes. STM later advised the retention time was approximately four minutes and thirty seconds.
The ATSB found the tram system was not equipped with a gauge to measure air pressure within the brake cylinder. The ATSB also found that at the time of the incident, the tram crew were not aware of the allowable air retention times and the possible effects on braking.
Handbrake
The handbrake on the ‘J’ class consisted of a gooseneck handle attached to a chain winch. A chain was fitted between the hand-driven chain winch and the brake rigging (Figure 7). To engage the handbrake, the driver was required to feed air into the brake cylinder (apply brakes) which engaged all the brake shoes on the tram and put slack in the chain. The driver was then required to wind the gooseneck handle, which removed slack from the chain. The retrieval of the chain applied a tension force to the brake rigging to maintain a friction force between the brake shoes and the wheel tread faces (Figure 7). The handbrake was locked in position by using a locking pawl and ratchet system.
To release the handbrake, the pawl was required to be unlocked, which released the tension in the system, and allowed the chain winch to unwind. The driver was required to exercise caution when releasing the handbrake to avoid injury from contact with the unwinding gooseneck handle.
The ATSB found that the handbrake was not applied to the tram prior to it running away on the falling gradient.
Emergency braking
Emergency braking on the ‘J’ class is completed by engaging the traction motor reverser. The reverser forces the motor to move the tram wheels in the opposite direction to their direction of travel. This braking system may only be applied when the tram is manned and therefore, could not be applied to the ‘J’ class.
A similar system exists on the Nagasaki and was used by the driver to stop the tram prior to the collision with the ‘J’ class.
Figure 7: Air brake and handbrake system on the 675 ‘J’ class tram. The yellow arrows denote force direction for applying braking effort

Source: Sydney Tramway Museum, annotated by the ATSB
675 ‘J’ class tram maintenance
The ‘J’ class was built in 1904 in Sydney with the tram’s electrical systems and air brake equipment originally imported from the United States of America (USA). The bogie was a Brill 21E type also imported from the USA. The tram was decommissioned in 1935 and was fully refurbished by Bendigo Tramways in 2007.
STM procured the tram from Bendigo Tramways in 2008 and completed further work for passenger operations at STM.
STM asset management system requires the ‘J’ class to undergo an intermediate inspection annually and an overhaul inspection every 20 years. The tram crew were also required to complete pre-inspection checks before operating the tram.
The last annual inspection for the ‘J’ class was completed on 30 April 2016 and the tram was certified fit for operations. The pre-inspection checklist completed on the day of the incident also supported that the tram was fit to operate.
The ATSB determined that STM had completed all of the required inspections on the ‘J’ class in accordance with their standards.
Tram operations and stabling
General operations
The museum operated approximately 5 out of their 20 operational ready trams annually. Trams scheduled for passenger operations were moved out of the running shed onto the depot mainline. Once on the depot mainline, the trams were moved in the Down direction towards the RNP. The trams then crossed over onto a bidirectional mainline. Once on the bidirectional mainline, crews were then required to change the direction of the roof-mounted power supply pole and proceed to the opposite end of the tram to operate it in the Up direction towards the RSWS. The trams were then parked, in single file, on the Up mainline opposite the RSWS. The trams were then operated in that order to Sutherland and back. Upon returning, trams then operated to the RNP and back to the RSWS (Figure 3).
The total length of track at STM was 3.6 km. The track comprised of a double line section (Up and Down mainlines) and bidirectional line sections on either ends (Figure 3). The bidirectional line sections were protected by the ‘staff and ticket’ method of safeworking, with each bidirectional line having its own unique staff.
A maximum of two trams were permitted to enter the same bidirectional line section as long as they travelled in convoy (the same direction). The first tram driver to enter a bidirectional line section was shown the unique staff (metal token) for that section and was provided a ticket permitting entry into that section of track. The second tram driver trailing behind the first was then provided the staff and permitted to enter the same section. Convoy operations were conducted at low speed (20 km/h) and both tram crews were required to be in sighting distance of each other.
For single tram operations on the bidirectional lines, tram crews were provided the unique staff for that bidirectional line section only. This gave the crew operating the tram exclusive access to that section. This was the process applied on the day of the incident.
Tram crewing requirements
STM required at least two crew members (driver and conductor) to be on board trams during operations. Some trams required a third person (observer), where the conductor could take control of the tram if the driver became incapacitated. The Nagasaki and ‘Y’ class trams required two crew members, while the ‘J’ class required three.
ATSB found that STM complied with the crewing requirements for the ‘Y’ class and Nagasaki trams, but not for the ‘J’ class. Two crew members were on board the ‘J’ class for its journey between the running shed and the RSWS. In addition to this, it was found that movements near the RSWS on the double line track for the ‘J’ class were completed by one crew member only.
The ATSB determined that although the crewing requirements were not complied with for the ‘J’ class, the absence of the third crew member was not a contributing factor to the incident.
Stabling of the ‘J’ class tram near the RSWS
The track between depot junction and the RNP end of the RSWS was on a falling gradient towards Sutherland. The track then levelled out between the RNP end and Sutherland end of the RSWS. The track then continued on a falling gradient after that towards Sutherland (Figure 5).
Prior to the runaway, the ‘J’ class was moved and parked on the falling gradient adjacent to Cross St junction (Figure 5). The service air brake was applied and a single hardwood wheel chock was placed under the front left-hand wheel. The handbrake was not applied when parking the ‘J’ class both times on the day of the incident.
STM’s operating procedure specified that unattended trams, which were parked at the kerb near Cross St Junction (falling gradient), were required to either be chocked or have the handbrake applied. The operating procedure also specified that drivers were required to release air from the brake cylinders or they would release over time. The ‘J’ class crew complied with the requirements of the operating procedure with respect to applying a chock but did not release air from the brake cylinders.
The ATSB found that STM complied with the operating procedure requirement with respect to placing a chock under the ‘J’ class wheel, however did not release the service brake (air from the brake cylinders). If the service brake had been released, the driver would have likely had an opportunity to identify that the chock could not sufficiently restrict movement of the ‘J’ class on the gradient. This would have been a better outcome than the brakes gradually releasing and the ‘J’ class rolling when it was unmanned.
The ATSB also found that although the falling gradient near Cross St junction had been identified within its SMS documents, it was likely difficult for drivers to observe visually.
Chocks
The ATSB identified that the chock type used to stable the ‘J’ class on the day of the incident was newly adopted by STM. It was a triangular wedged hardwood chock (Figure 8). Applying this type of chock required the crew member to visually line up the wedge with the curve tread face of the wheel.
ATSB investigators noted that the ‘J’ class had a lowered footboard which hindered the access to install the chock. This meant that lining up the triangular wedged hardwood chock with the wheel would have required the crew to get down lower than usual to visually line it up and place it against the wheel.
The ATSB replicated the process to install the hardwood chock under the ‘J’ class. The ATSB found that the chock could not be installed against the wheel adequately due to the chock fouling the brake gear. The ATSB determined it was likely the chock was incorrectly installed and did not function as intended.
The older chock type was a 600 mm long rectangular softwood block (Figure 8). Applying this type of chock required the crew member to place it under the wheel and ensure that the wheel flange deformed the softwood to provide a tight wedge. The new design chock being hard wood did not likely provide this tight wedge as it would not have deformed like the softwood chock. The large longitudinal face of the older chock enables reliable contact with the wheel tread face. In comparison, the new design chock’s narrow contact area required precision when installing the chock against the wheel tread face. At the time of the incident, STM were using both soft and hardwood wheel chocks.
After the incident, the chock was found in the four foot with witness marks on it consistent with that of a tram having driven over it at an angle (Figure 8). This was likely due to the ‘J’ class wheel rolling over the chock.
STM’s change management procedure (STM6012) requires risks to be assessed for any changes to operations made which can affect safety. The procedure required a change request form to be completed and approved by the rail safety manager. All changes which were made were also required to be entered into a change register (STM6170) which is reviewed by the board periodically. Based on the evidence provided, it was not evident that STM complied with its change management procedure when it adopted the new hardwood chock.
It is likely that if the change management procedure had been followed, STM would have had an opportunity to identify the risks associated with the newly adopted hardwood chock.
Figure 8: Comparison of the old and new type chock

Source: ATSB
Handbrake use
STM staff advised that it had become a work place practice not to apply the handbrake due to the risk of a wrist injury when releasing it. STM’s operating procedure did not require tram crews to apply both a handbrake and install a wheel chock.
The ATSB also found that the training program for tram crews did not include information on the correct use of handbrakes.
The ATSB determined that it is likely that the handbrake was not applied due to insufficient training on its correct use, as well as, the lack of a requirement to do so. It is likely that the ‘J’ class would not have rolled away when the air brakes released had the handbrake been applied correctly.
Risk management
Risk assessment
The ATSB reviewed STM’s risk register and found that STM had identified the risk of ‘unmanned tram runaway and collision’. The risk controls listed by STM included;
- Trams to be parked on a level surface
- Trams chocked
- Trams attended (Person on tram unless stable)
- Driving key secured (Ensures only qualified staff can move the tram).
Risk controls one to three failed on the day of the incident and risk control four was implemented but was not applicable to the unmanned runaway of the ‘J’ class.
All STM operational ready trams have a working handbrake (an existing risk control), which was not captured in the risk register. Additionally, STM’s operational procedures only required staff to either install a chock or apply a handbrake when stabling trams.
The ATSB found that the use of handbrakes was avoided by STM tram crews because of:
- The lack of a requirement to do so as long as chocks were applied
- The risk of injury when releasing the handbrake.
Risk control effectiveness
The ATSB found that STM did not appropriately manage risk control effectiveness for the risk controls protecting the ‘J’ class from running away with respect to the following:
- Although an incline near Cross St was referenced in SMS documentation, it was likely difficult for drivers to determine where the flat gradient ended and the incline began to safely park trams.
- It was not evident that STM had followed its change management process when adopting the new hardwood chock and installing it under the ‘J’ class.
- It was not evident that tram crews had been adequately trained in the correct use of handbrakes.
- Drivers were unaware of the retention times for air within the tram’s brake cylinder and the consequences of air escaping.
From the evidence available, the following findings were made regarding the unmanned runaway of the ‘J’ class which collided with Nagasaki at Loftus NSW on 15 May 2016. These findings should not be read as apportioning blame or liability to any particular organisation or individual.
Safety issues or system problems are highlighted in bold to emphasise their importance. A safety issue is an event or condition that increases safety risk (a) can reasonably be regarded as having the potential to adversely affect the safety of future operations, and (b) is a characteristic of an organisation or a system, rather than a characteristic of a specific individual, or characteristic of an operating environment at a specific point in time.
Contributing factors
- The ‘J’ class tram was parked on a downhill gradient and left unattended.
- The tram’s manual lapping air brake system was not designed to automatically feed air into its brake cylinder and therefore braking force could not be restored when air leaked to atmosphere.
- STM did not follow its change management process for adopting the new hardwood chock type. Subsequently, the hardwood chock could not be applied reliably under the ‘J’ class wheel and could not restrict its movement [Safety Issue].
- STM did not follow its operations handbook when stabling the ‘J’ class with respect to releasing air from the brake cylinder.
- STM did not comply with its risk control in ensuring that trams were attended when parked [Safety Issue].
- STM did not require the application of all available and reasonably practicable risk controls when parking trams with respect to their location and handbrake application [Safety Issue].
Other factors that increased risk
- There was no delineation separating inclined and level surfaces, and drivers were required to visually determine gradients.
The safety issues identified during this investigation are listed in the Findings and Safety issues and actions sections of this report. The Australian Transport Safety Bureau (ATSB) expects that all safety issues identified by the investigation should be addressed by the relevant organisation(s). In addressing those issues, the ATSB prefers to encourage relevant organisation(s) to proactively initiate safety action, rather than to issue formal safety recommendations or safety advisory notices.
Depending on the level of risk of the safety issue, the extent of corrective action taken by the relevant organisation, or the desirability of directing a broad safety message to the rail industry, the ATSB may issue safety recommendations or safety advisory notices as part of the final report.
All of the directly involved parties were provided with a draft report and invited to provide submissions. As part of that process, each organisation was asked to communicate what safety actions, if any, they had carried out or were planning to carry out in relation to each safety issue relevant to their organisation.
The initial public version of these safety issues and actions are repeated separately on the ATSB website to facilitate monitoring by interested parties. Where relevant the safety issues and actions will be updated on the ATSB website as information comes to hand.
Change management process implementation for safety critical changes
Safety issue number: RO-2016-006-SI-02
Safety issue description: STM did not follow its change management process for adopting the new hardwood chock type. Subsequently, the hardwood chock could not be applied reliably under the ‘J’ class wheel and could not restrict its movement.
Attending parked trams
Safety issue number: RO-2016-006-SI-03
Safety issue description: STM did not comply with its risk control in ensuring that trams were attended when parked.
Use of all available and reasonably practicable risk controls when parking trams
Safety issue number: RO-2016-006-SI-04
Safety issue description: STM did not require the application of all available and reasonably practicable risk controls when parking trams with respect to their location and handbrake application.
Sources of information
Submissions
Under Part 4, Division 2 (Investigation Reports), Section 26 of the Transport Safety Investigation Act 2003 (the Act), the Australian Transport Safety Bureau (ATSB) may provide a draft report, on a confidential basis, to any person whom the ATSB considers appropriate. Section 26 (1) (a) of the Act allows a person receiving a draft report to make submissions to the ATSB about the draft report.
Any submissions from those parties will be reviewed and where considered appropriate, the text of the draft report will be amended accordingly.
Purpose of safety investigationsThe objective of a safety investigation is to enhance transport safety. This is done through:
It is not a function of the ATSB to apportion blame or provide a means for determining liability. At the same time, an investigation report must include factual material of sufficient weight to support the analysis and findings. At all times the ATSB endeavours to balance the use of material that could imply adverse comment with the need to properly explain what happened, and why, in a fair and unbiased manner. The ATSB does not investigate for the purpose of taking administrative, regulatory or criminal action. TerminologyAn explanation of terminology used in ATSB investigation reports is available here. This includes terms such as occurrence, contributing factor, other factor that increased risk, and safety issue. Publishing informationReleased in accordance with section 25 of the Transport Safety Investigation Act 2003 Published by: Australian Transport Safety Bureau © Commonwealth of Australia 2019
Ownership of intellectual property rights in this publication Unless otherwise noted, copyright (and any other intellectual property rights, if any) in this report publication is owned by the Commonwealth of Australia. Creative Commons licence With the exception of the Coat of Arms, ATSB logo, and photos and graphics in which a third party holds copyright, this publication is licensed under a Creative Commons Attribution 3.0 Australia licence. Creative Commons Attribution 3.0 Australia Licence is a standard form licence agreement that allows you to copy, distribute, transmit and adapt this publication provided that you attribute the work. The ATSB’s preference is that you attribute this publication (and any material sourced from it) using the following wording: Source: Australian Transport Safety Bureau Copyright in material obtained from other agencies, private individuals or organisations, belongs to those agencies, individuals or organisations. Where you wish to use their material, you will need to contact them directly. |