
Summary
On the morning of 27 December 2025, while transiting towards Dregerhafen in Papua New Guinea, the 93.4 m passenger ship Coral Adventurer ran aground on a coral reef north of Nussing Island.
After an unsuccessful attempt to manoeuvre the ship off the reef using its propulsion at high tide on 27 December, the ship's operator engaged a towage provider to assist with refloating it.
The ATSB has commenced a safety investigation into this incident and is gathering evidence from relevant parties for analysis.
The ATSB released a preliminary report, which details factual information established in the investigation’s early evidence collection phase, on 12 March 2026. See below.
Should a critical safety issue be identified at any time during the investigation, the ATSB will immediately notify the operators of the ship, and other relevant parties so that appropriate and timely safety action can be taken.
A final report will be published at the conclusion of the investigation.
Preliminary report
Report release date: 12/03/2026
| This preliminary report details factual information established in the investigation’s early evidence collection phase, and has been prepared to provide timely information to the industry and public. Preliminary reports contain no analysis or findings, which will be detailed in the investigation’s final report. The information contained in this preliminary report is released in accordance with section 25 of the Transport Safety Investigation Act 2003. |
Summary video
The occurrence
Departure
On 18 December 2025, the 93 m Coral Adventurer departed Cairns, Queensland, for a 12-night cruise visiting Papua New Guinea (PNG) with 80 passengers and 44 crew on board. The ship’s itinerary comprised 11 ports and anchorages on the north-east coast of PNG, concluding on 30 December in the port of Madang (Figure 1). The voyage included night sailings between locations, arriving at the next scheduled destination at about sunrise for daytime passenger expedition.
Figure 1: Coral Adventurer’s itinerary

Source: Google Earth, Coral Expeditions, annotated by the ATSB
On 26 December, the ship was at anchor off Lababia, approximately 60 km south‑south‑east of Lae. During the evening, the chief mate completed the departure checklist and, at 1918, the ship commenced its 63 mile[1] passage to Dregerhafen (Figure 2).
Figure 2: Lababia to Dregerhafen
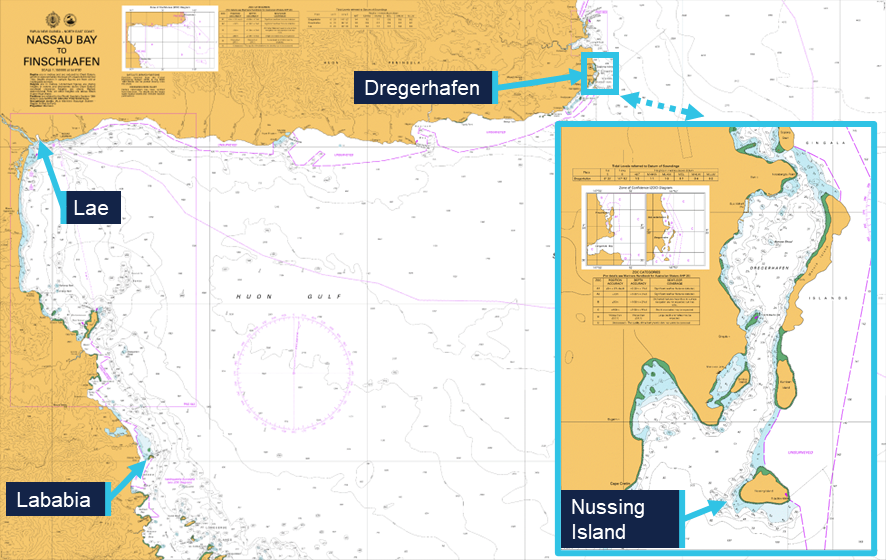
Source: Australian Hydrographic Office, annotated by the ATSB
Grounding
At 0400 on 27 December, the chief mate took over the bridge watch from the second mate. During the watch handover, the second mate reported that the ship was encountering currents and was being set to starboard, steering a heading[2] of 358°, and making good a course[3] of 012° at 5.4 knots.[4] The ship had one generator providing electrical power and both Azipull propulsion thrusters running at 120 RPM. The ship’s estimated time of arrival (ETA) at Dregerhafen of 0530 was also discussed.
The second mate stayed on the bridge to complete administrative tasks, seated away from the bridge console on a couch aft of the chart table. At the same time, the lookout handed over the watch, with a trainee deck rating taking over.
At 0407, the chief mate reviewed the route into Dregerhafen on the electronic chart display and information system (ECDIS). They then modified the route, moving the second waypoint and inserting an extra waypoint. This segmented the 100° turn around Nussing Island into 2 legs, while still closely following the original planned track (see the section titled Passage planning).
At about 0500, the chief mate instructed the lookout to remove the anchor lashings in preparation for the ship’s approach into Dregerhafen. The chief mate also contacted the duty engineer and requested a second generator, which was started and brought online shortly after. By 0510, both anchors had been cleared for use, and the lookout had returned to the bridge.
At 0512, the ship was in autopilot mode steering a heading of 357°. The ship was making good a course of 009° at a speed over ground of 5.6 knots while approaching the final waypoint of the route (Figure 3).
The chief mate then attempted switching the ECDIS monitored route to Route 2 – the track into Dregerhafen. However, as Route 2 had been modified, it failed to load as the active route. This caused a delay as the chief mate completed the required ECDIS ‘route check’ for Route 2, to allow it to be monitored as the active route.
Figure 3: Route 2 – entrance to Dregerhafen
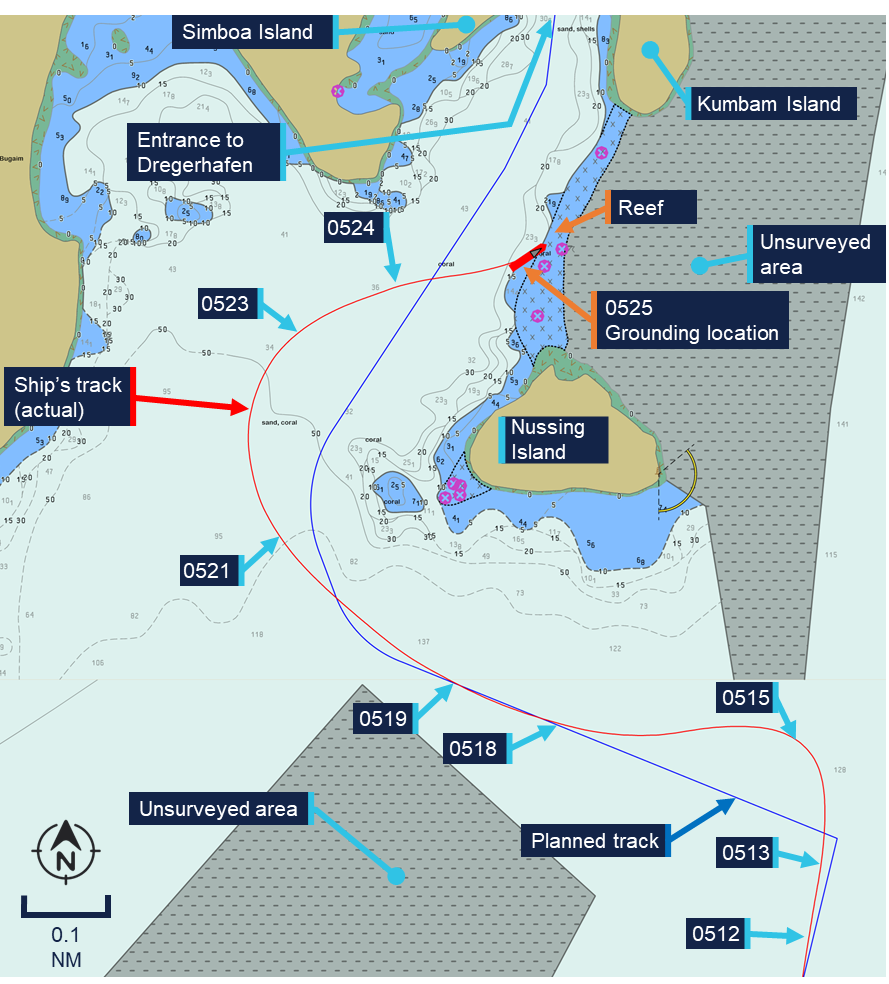
Planned track (blue) and actual track (red) overlaid on vector chart in use on board Coral Adventurer at the time of the grounding. Source: Australian Hydrographic Office, modified and annotated by the ATSB
While the chief mate was conducting the ‘route check’, the ship passed the wheel over point[5] for the turn to the next course (293°). At 0512:26, with the ship heading towards unsurveyed waters to the north, the chief mate switched to manual steering in common mode[6] to facilitate a quicker turn and return to the planned track.
During the turn the ship slowed, and the chief mate perceived this was caused by a strong current. In response, at 0513:49, they increased the setting of both Azipull thrusters to 180 RPM to regain speed. Speed continued to reduce as the ship turned towards the planned track, reaching 3.8 knots at 1514:46 before starting to increase in response to the increased RPM setting (Table 1).
| Time | Event | SOG[7] knots |
| 0512:00 | Approached end of Route 1 – south of Nussing Island | 5.6 |
| 0512:26 | Manual steering in common mode, port turn input | 5.6 |
| 0513:49 | Azipull thrusters increased to 180 RPM | 5.2 |
| 0514:46 | Continued turn to port, minimum recorded speed over ground | 3.8 |
| 0518:43 | Autopilot mode engaged | 7.7 |
| 0519:10 | Passed wheel over point | 8.1 |
| 0521:00 | Manual steering in common mode, starboard turn input | 8.5 |
| 0523:30 | Steady | 7.4 |
| 0524:00 | Master on the bridge | 8.0 |
| 0525:00 | Master noted shallow water ahead | 8.3 |
| 0525:11 | Port turn input | 8.5 |
| 0525:17 | Grounding noises | 8.4 |
| 0525:30 | Vessel stopped | 0 |
| 0550 | PA announcement to passengers | 0 |
At about 0518, the ship returned to the planned track and on achieving a heading of 293°, the chief mate switched the steering back to autopilot mode.
At 0519:10, the ship arrived at the wheel over point for the next course of 339° at a speed of 8.1 knots. This route leg ran a distance of 0.18 mile between the modified waypoints. The chief mate planned to use the autopilot to execute a continuous turn to starboard onto the following charted course of 033°, which led to the entrance channel into Dregerhafen (see the section titled Passage planning). However, the ship did not respond as the chief mate expected and overshot the planned turn. At 0521, the chief mate switched to manual steering and increased the rate of turn to return to the planned track. By then the ship’s speed had increased to about 8.5 knots, which continued to take the ship further off course to the west.
The chief mate later reported that due to darkness[8] and the absence of navigational aids and lights ashore, they were unable to accurately identify the surrounding topography at the time. They were concentrating on the ECDIS, with efforts to return to the planned track of 033°.
They then continued the turn to starboard at a high rate of turn until 0523:30, when the ship was brought to a north-easterly heading. At 0524:00, the master arrived on the bridge and greeted the chief mate, who responded that they were experiencing ‘a strong current’.
The chief mate later also reported that they then shifted their focus from the ECDIS screen to outside where they could see silhouettes of the islands. They reported being ‘unable to correctly visually identify the entrance into Dregerhafen’ and ‘losing situational awareness’. Meanwhile, the ship continued across the planned track, heading towards the then visible opening between Nussing and Kumbam Islands (see the section titled Dregerhafen).
At 0525, the master (standing at the forward console) advised the chief mate that it appeared they were heading into shallow water and at 0525:11, the chief mate attempted a hard turn to port. At 0525:17, a loud noise could be heard as the ship grounded at a speed of 8.5 knots on the bank connecting Nussing and Kumbam Islands. The ship experienced a series of ‘shudders’, before coming to an abrupt halt at 0525:30.
In response, the master reduced the Azipull thrusters’ setting to zero and telephoned the chief engineer. The master informed the chief engineer that the ship had grounded and directed them to commence damage control actions. Other members of the ship’s crew were notified, and the master also reported the incident to the ship’s shore-based operator, Coral Expeditions. The ship’s crew then proceeded to check the integrity of the ship, sounding tanks and void spaces and taking soundings of the seabed around the hull.
At 0550, the master made the first announcement on the public address system (PA), informing passengers that the ship had grounded, but was safe. At 0620, the ship’s expedition leader made another PA announcement updating the passengers on the situation. The passengers were not mustered, and a (limited) part of the excursion program continued for their entertainment.
Expedition staff later completed dive inspections, which confirmed that the ship was resting on the seabed along its starboard side (Figure 4). The propulsion and steering were unaffected.
Figure 4: Underwater images taken during the dive inspection
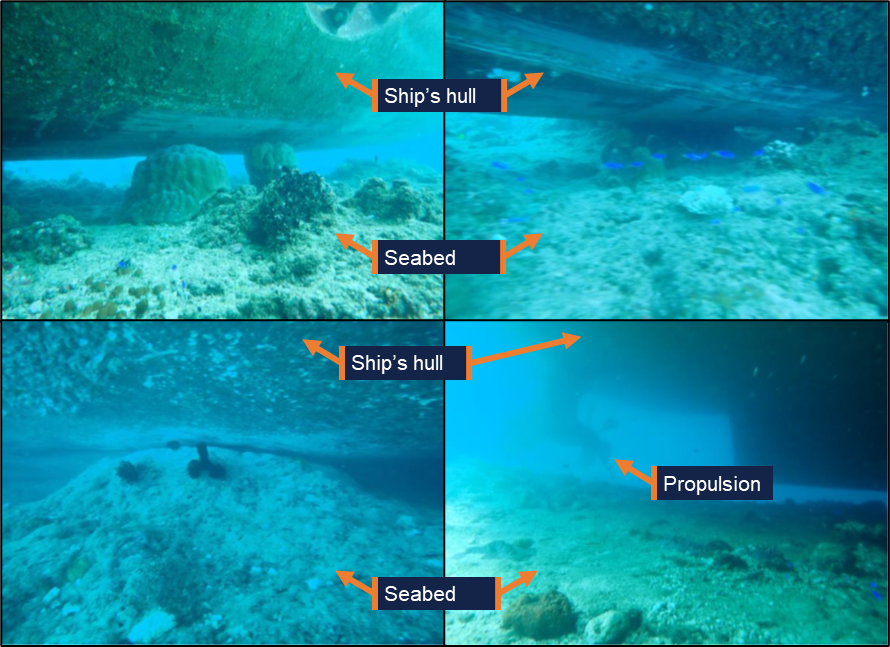
Source: Coral Expeditions, annotated by the ATSB
Refloating
After an unsuccessful attempt by the ship’s crew to manoeuvre the ship off the reef at high water on 27 December, Coral Expeditions, engaged towing company Pacific Towage to assist with the refloating. On 28 December, Pacific Towing tasked the tug Macedon from Lae (100 km to the west), which arrived near the ship shortly after midday. After the initial toolbox meeting, the refloating attempt with Macedon commenced at about 1420. However, after half an hour, Macedon’s crew reported that the tug’s engines had overheated and the refloating was suspended. During refloating attempts, the passengers and hotel staff were landed ashore using the ship’s tenders to ensure their safety.
On 29 December, Pacific Towage engaged the more powerful tug Langila for another refloating attempt. However, due to administrative issues, no refloating was attempted on the day.
On 30 December, all passengers were disembarked from Coral Adventurer and were repatriated to Cairns via a charter flight from Lae. Coral Expeditions entered a salvage contract with Pacific Towing and the refloating attempt with Langila commenced at 1422.
By 1534, Coral Adventurer was successfully refloated. The ship was then navigated to a nearby safe anchorage, where it was anchored for further damage assessment and inspections by the ship’s classification society, DNV.
Context
Coral Adventurer
Coral Adventurer (Figure 5) was built in 2019 by Vard Vung-Tau, Vietnam. It was registered in Australia and classed with DNV. It was owned by CPC Marine and managed by Coral Princess Cruises (NQ) in Cairns, which operated commercially as Coral Expeditions.

Source: Coral Expeditions
Coral Adventurer had a length overall of 93.4 m, a moulded breadth of 17.2 m and a design draught of 4.4 m. It was certified and equipped to carry a total of 126 passengers in 63 cabins as well as a maximum crew complement of 42, for a total of 168 persons on board. The ship’s relatively small size and limited draught were a design choice to allow it to access remote locations away from port infrastructure for ‘expedition’ style cruises. To provide access ashore, it was equipped with 2 large tenders that could be lifted using a hydraulic platform at the stern. Additionally, the ship carried several inflatable boats that could be used for shore access as well as diving and snorkelling.
To comply with the SOLAS[9] requirement for the carriage of navigational information, Coral Adventurer was fitted with dual Transas 4000 electronic chart display and information systems (ECDIS). For operation in Australian and Papua New Guinean waters, the crew utilised official electronic navigational charts, published by the Australian Hydrographic Office. The ship was also fitted with a Danelec DM100 voyage data recorder.
Propulsion
Coral Adventurer was equipped with diesel-electric propulsion, with electrical power provided by two 1,432 kW Caterpillar 3512C and one 994 kW Caterpillar C32 generator sets. Propulsion and steering were provided by 2 electrically‑driven Rolls-Royce Azipull thrusters of 1,200 kW each. Additionally, an 800 kW tunnel thruster was fitted at the bow to provide transverse thrust while manoeuvring at low speed.
The Azipull units consisted of an electric drive motor fitted inside the hull with a gearbox driving a vertical shaft connected to the underwater thruster unit. The thruster units were fitted with fixed pitch pulling propellers and could be rotated trough 360°. This allowed the thrust vector of the main propulsion to be rotated through 360°, improving slow speed manoeuvring capabilities. The Azipull thrusters were controlled by a Helicon X3 remote control system. Normal control was through sets of ball-shaped controllers (Figure 6). One set was mounted in the centre of the bridge console and one set on each bridge wing control station.
Figure 6: Azipull thruster controls
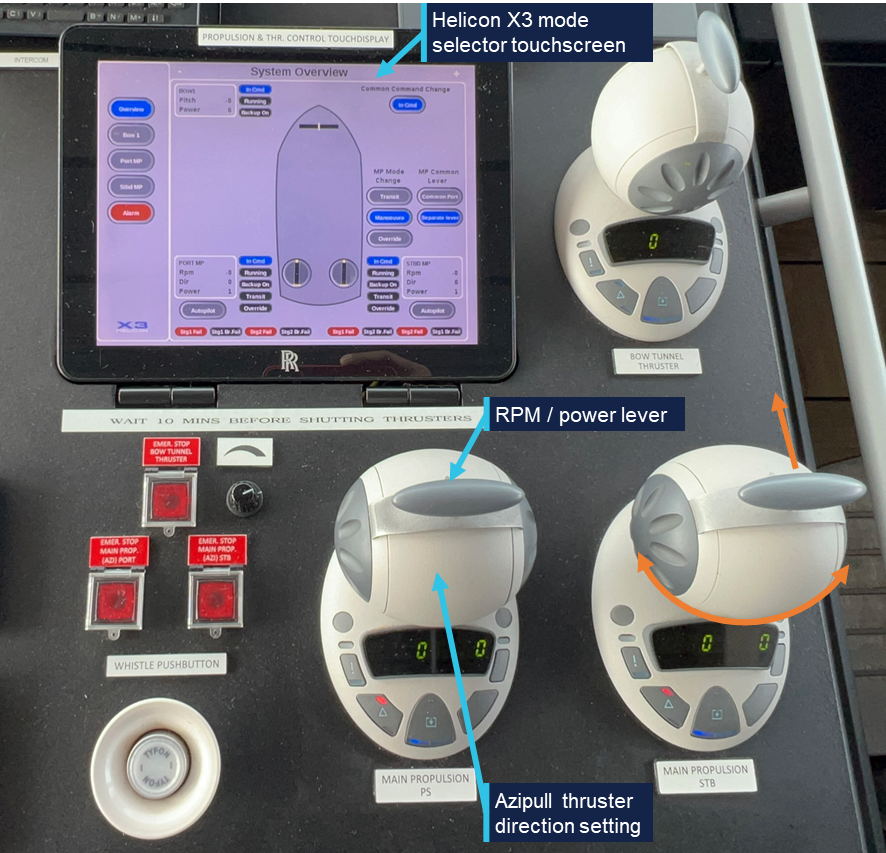
Source: ATSB
Additionally, a push-button controlled non-follow up system was available in the centre console and another locally in the thruster room. In normal operation, several control modes were available and could be selected on the Helicon X3 touchscreen (Table 2).
| Steering mode | Explanation | Note |
| Transit mode | Azimuth angle limited to ±35° | Automatically selected over 10 knots |
| Manoeuvre mode | Azimuth angle free to rotate through 360° | Below 10 knots |
| Common mode | Single controller controls power/speed and direction for both thrusters | |
| Separate lever | Individual thruster control by each controller | |
| Autopilot | Control of thruster by autopilot system | Selected on one or both Azipull thrusters |
While approaching Nussing Island, the chief mate was steering the ship on autopilot before switching to manual steering in common mode, controlling both Azipull thrusters with a single controller. This offered better steering control capability than autopilot mode but limited slow speed steering capability when compared to using separate controllers for individual thruster operation.
Crew
Coral Adventurer had a multi-national crew of 44. The marine crew consisted of 16 persons, split between deck and engine departments under the chief mate and chief engineer. This exceeded the requirements of its minimum safe manning document.
The cruise staff consisted of 6 expedition crew, led by the ‘expedition leader’ and 22 hotel and catering crew managed by the purser. While the expedition and hotel staff reported to their own department heads, the master was responsible for overall safety.
Master
The master had held an Australian unlimited master’s certificate of competency since 2019. They had seagoing experience as a watchkeeping officer in a variety of roles from 2011 on tankers and domestic commercial vessels (DCVs),[10] until accepting a shore‑based position in mid‑2023.
In May 2024, they completed a relief contract for Coral Expeditions as second mate on Coral Geographer before joining its sister ship, Coral Adventurer, as chief mate in September 2024. This was followed by a promotion to master in May 2025, after which they had sailed on a regular 3-week rotation.
Chief mate
The chief mate held an Australian certificate of competency as chief mate. They had worked on international cargo ships as a navigation officer since 2010 in a variety of roles, including as master, before joining Coral Expeditions as second mate in 2022. In August 2025, they had been promoted to chief mate on board another Coral Expeditions’ vessel, Coral Discoverer, before joining Coral Adventurer for the first time in Cairns on 18 December.
As head of the deck department, the chief mate was responsible for deck maintenance and keeping the 0400–0800 and 1600–2000 watches on the bridge.
Second mate
The second mate held an Australian certificate of competency as chief mate. They had worked at sea since 2009, including 7 years as second officer on international cargo ships before joining Coral Adventurer in September 2025. After completing one contract as third mate, they joined in Cairns on 18 December for their first voyage as second mate on board this ship.
The second mate was responsible for passage planning and the maintenance of nautical equipment and publications. They kept the 0000–0400 and 1200–1600 bridge watches.
Third mate
The third mate held an Australian certificate of competency as a chief mate. They had been working at sea since 2016 and, from 2021, as third mate on container ships. The third mate joined Coral Adventurer for the first time in Cairns on 18 December.
They kept the 0800–1200 and 2000–2400 bridge watches and were responsible for maintaining the ship’s safety and firefighting equipment.
Lookout
The lookout was rated as ‘trainee’ and held an Australian certificate of proficiency as navigational watch rating (NWR) since 2 December 2025. They had worked on DCVs before joining Coral Adventurer in November 2025. Though qualified to steer ships equipped with a conventional rudder as part of their NWR, the lookout was not trained to operate Coral Adventurer’s Azipull thrusters and thus could not act as helmsperson.
Coral Expeditions
Coral Expeditions was founded in 1983. The company initially operated small DCVs on voyages exploring Australia’s Kimberley region and other remote coastal areas.
At the time of the occurrence, the company operated 3 Australian-flagged passenger ships, Coral Adventurer, Coral Geographer and Coral Discoverer.
Safety management system
As required by the International Safety Management (ISM) Code, Coral Expeditions had implemented a safety management system (SMS) on board its vessels. A valid document of compliance (DOC) for operating passenger ships was issued to the company and a safety management certificate covering Coral Adventurer was in place, both issued by DNV.
Passage planning
Preparation for cruises started with the selection of the itinerary by Coral Expeditions based on previous experience, availability of shore excursions and capabilities of the ship. On board, the second mate completed the passage planning process, as per the procedure in the company’s SMS, using the passage planning checklist.
To streamline the passage planning process, the ship maintained a library of routes in the ECDIS, which had been approved by the ship’s master and used previously. These routes were marked ‘CA’ in the system and were required to be used wherever possible.
The routes were split into sectors, separating the confined water transits, such as harbour approaches or pilotage sections, from longer open water transits. This allowed routes between ports to be used in various combinations, including the incorporation of any new transit routes.
For the passage from Lababia to Dregerhafen, the passage plan included 2 ‘CA’ approved routes:
- Route 1 – from the ship’s anchored position at Lababia to a position south of Nussing Island
- Route 2 – from the position south of Nussing Island to the intended anchor position within Dregerhafen.
These routes had been programmed into the ECDIS, with Route 1 being actively monitored at the start of the passage and Route 2 in the monitoring queue. The passage plan (which included a reference to these routes) had been printed and was signed for approval by the master and countersigned by all watchkeepers. Based on the planned departure time of 1900 on 26 December, the ship’s estimated time of arrival (ETA) at Dregerhafen was 0600 on 27 December.
Before an ECDIS route could be actively monitored, a route safety check had to be conducted. The route safety check was a function of the ECDIS route editor, which checked the route for relevant dangers to navigation based on set parameters, such as the ship’s draught and speed. The operator then had to address any identified dangers before the ECDIS would allow the route to be loaded for monitoring. Any subsequent changes made to the route would invalidate the check and require a new route check to be completed.
On the incident voyage, both routes had been checked prior to departure. However, while transiting Route 1, the chief mate made changes to Route 2, adding an additional waypoint to the starboard turn around Nussing Island (Figure 7). This change invalidated the route check and meant that Route 2 could not be activated for monitoring without entering the route editor and conducting a new route check.
Figure 7: ECDIS courses showing the original and modified plan
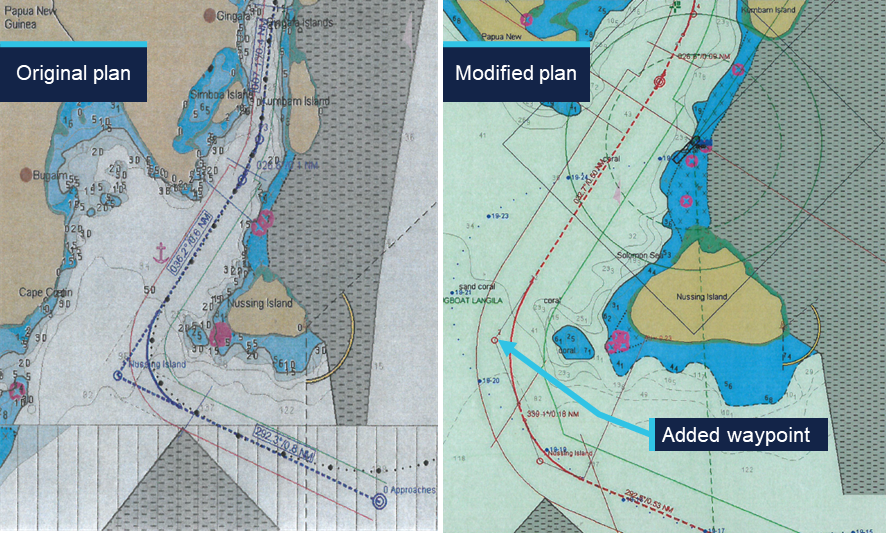
Source: Coral Adventurer, annotated by the ATSB
Dregerhafen
Dregerhafen (or Dreger Harbour) is a sheltered bay located 100 km east of Lae on the Huon peninsula in Papua New Guinea’s Morobe province. It is the southernmost of 2 sheltered bays, which are protected from the sea by the Gingala Islands to the east. The Gingala Islands are connected to each other by shallow reefs. No bathymetry is available for the area to the east of the islands, which is marked as unsurveyed on the chart.
The only entry into Dregerhafen is deep but narrow, with a maximum navigable width of 120 m (Figure 8). It requires passing west of Nussing Island and entering the passage between Simboa Island and Kumbam Island, before passing between Matura Island and a drying reef off the town of Gingala. The reef was marked with a lighted beacon, though this was not visible from the location of the ship during the turn.
Pilotage was not available nor was it required by local regulations.
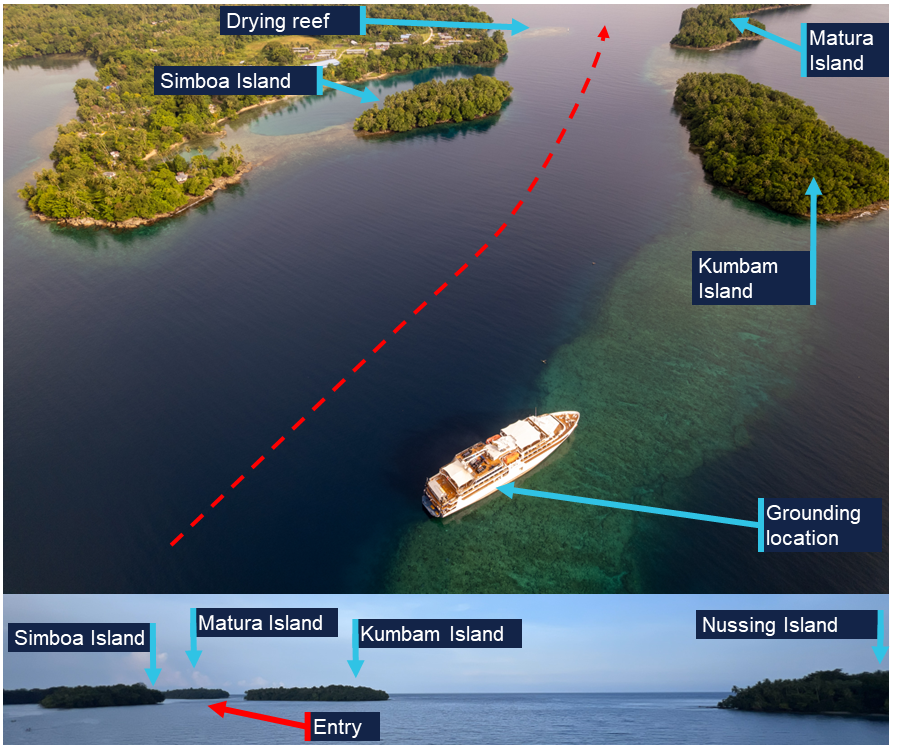
Aerial view of the entry to Dregerhafen. Insert below shows the view from the approximate ship’s position 3 minutes before grounding, taken from the height of the bridge in daylight. Source: Sebastian Bang, annotated by the ATSB. Insert view, the ATSB.
Further investigation
To date, ATSB investigators have attended Coral Adventurer while at anchor near Nussing Island to collect relevant recorded data, documentary and electronic evidence. The master and officers as well as relevant marine and hotel crew were interviewed.
Collection of other relevant evidence is being progressed.
The investigation is continuing and will include the following subject areas:
- verification, interpretation and analysis of voyage data recorder data
- review and analysis of collected closed circuit television footage
- analysis of relevant human factors
- review of the ship and company’s passage planning and navigation procedures, including resource management
- review of the ship’s emergency response procedures
- review of overall safety oversight.
A final report will be released at the conclusion of the investigation. Should a critical safety issue be identified during the course of the investigation, the ATSB will immediately notify relevant parties so appropriate and timely safety action can be taken.
Acknowledgements
The ATSB would like to acknowledge the Papua New Guinea Accident Investigation Commission and National Maritime Safety Authority for their assistance in the deployment of its investigators.
Purpose of safety investigationsThe objective of a safety investigation is to enhance transport safety. This is done through:
It is not a function of the ATSB to apportion blame or provide a means for determining liability. At the same time, an investigation report must include factual material of sufficient weight to support the analysis and findings. At all times the ATSB endeavours to balance the use of material that could imply adverse comment with the need to properly explain what happened, and why, in a fair and unbiased manner. The ATSB does not investigate for the purpose of taking administrative, regulatory or criminal action. About ATSB reportsATSB investigation reports are organised with regard to international standards or instruments, as applicable, and with ATSB procedures and guidelines. Reports must include factual material of sufficient weight to support the analysis and findings. At all times the ATSB endeavours to balance the use of material that could imply adverse comment with the need to properly explain what happened, and why, in a fair and unbiased manner. An explanation of terminology used in ATSB investigation reports is available here. This includes terms such as occurrence, contributing factor, other factor that increased risk, and safety issue. Publishing informationReleased in accordance with section 25 of the Transport Safety Investigation Act 2003 Published by: Australian Transport Safety Bureau © Commonwealth of Australia 2026 
Ownership of intellectual property rights in this publication Unless otherwise noted, copyright (and any other intellectual property rights, if any) in this report publication is owned by the Commonwealth of Australia. Creative Commons licence With the exception of the Commonwealth Coat of Arms, ATSB logo, and photos and graphics in which a third party holds copyright, this report is licensed under a Creative Commons Attribution 4.0 International licence. The CC BY 4.0 licence enables you to distribute, remix, adapt, and build upon our material in any medium or format, so long as attribution is given to the Australian Transport Safety Bureau. Copyright in material obtained from other agencies, private individuals or organisations, belongs to those agencies, individuals or organisations. Where you wish to use their material, you will need to contact them directly. |
[1] A nautical mile of 1,852 m.
[2] All ship’s headings in the report are in degrees by gyro compass with negligible error.
[3] All courses in this report are expressed in degrees true unless otherwise stated.
[4] One knot, or one nautical mile per hour, equals 1.852 kilometres per hour.
[5] The wheel over point indicates on the chart where rudder should be applied to start a turn, taking into account the speed of the rudder movement and inertia of the ship.
[6] See section titled Propulsion.
[7] SOG: speed over ground, based on recorded data from the ship’s number one GNSS receiver.
[8] The approach was conducted in moonless conditions during nautical twilight, which is the period of time the geometric centre of the sun is between 6° and 12° below the horizon. In general, during nautical twilight, the horizon is visible and outlines of terrestrial objects may still be discernible but detailed outdoor activities are likely curtailed without artificial illumination.
[9] The International Convention for the Safety of Life at Sea, 1974, as amended.
[10] Domestic commercial vessels are regulated under the Marine Safety (Domestic Commercial Vessel) National Law Act 2012.
Occurrence summary
| Investigation number | MO-2025-013 |
|---|---|
| Occurrence date | 27/12/2025 |
| Occurrence time and timezone | 19:25 UTC |
| Location | Nussing Island (100 km east of Lae), Papua New Guinea |
| State | International |
| Report release date | 12/03/2026 |
| Report status | Preliminary |
| Anticipated completion | Q4 2026 |
| Investigation level | Short |
| Investigation type | Occurrence Investigation |
| Investigation phase | Examination and analysis |
| Investigation status | Active |
| Mode of transport | Marine |
| Marine occurrence category | Grounding |
| Occurrence class | Serious Incident |
| Highest injury level | None |
Ship details
| Name | Coral Adventurer |
|---|---|
| IMO number | 9838644 |
| Ship type | Passenger/Cruise |
| Flag | Australia |
| Classification society | Det Norske Veritas Germanischer Lloyd |
| Owner | CPC Marine Pty Ltd |
| Manager | Coral Princess Cruises |
| Destination | Port of Madang, Papua New Guinea |
| Injuries | None |
| Damage | Minor |